基于优化的六自由度工业机器人NURBS轨迹规划*
2017-11-30张海威赵东雷
乐 英,库 巍,卢 艺,张海威,赵东雷
(华北电力大学 能源动力与机械工程学院,河北 保定 071000)
基于优化的六自由度工业机器人NURBS轨迹规划*
乐 英,库 巍,卢 艺,张海威,赵东雷
(华北电力大学 能源动力与机械工程学院,河北 保定 071000)
针对机器人在运动过程中遇到较大振动和冲击问题,为进一步提高轨迹规划的精度,减轻振动和冲击,延长机器人使用寿命。以实验室REBOT-V-6R机器人为研究对象,分别采用三次多项式、三次B样条和三次NURBS在基于最短路程原则下对机器人轨迹进行规划。规划结果表明,采用三次NURBS规划的运动轨迹速度、加速度光滑,连续没有突变,机器人轨迹精度较好,运动性能优于三次多项式样条和三次B样条。
工业机器人;NURBS;轨迹规划;优化
0 引言
轨迹规划是机器人运动学的具体应用,它研究的内容是根据任务要求计算出预期的运动轨迹,从而对机器人的任务、轨迹等进行描述[1]。常用的机器人轨迹规划分为笛卡尔空间轨迹规划和关节角度空间轨迹规划,这里对机器人在关节角度空间进行轨迹规划。
在关节角度空间规划中通常给出起始点,运动轨迹上的中间点是通过插值来进行求取的。具体的过程是在关节空间中描述各作业点的位姿,然后在插补点的基础上拟合成光滑的函数。由于各关节函数描述了各关节所经过的点,机器人在联动的情况下,各关节通过各自轨迹段的时间是相同的,所以它们在满足各自的期望位姿之外并同时达到轨迹段的终点。机器人的轨迹规划方法主要是利用多项式、抛物线、样条曲线以及不同曲线相结合的方式来对关节进行规划。在实际工程应用中,常采用三次多项式对关节轨迹进行规划[2],华南理工大学的研究学者在曲线的拐角处采用五次多项式过渡法进行轨迹规划的研究[3],相比三次多项式用五次多项式可以提高运动轨迹的精度,但是相应的计算量也会增大。而由文献[4]可知对机器人各关节用七次多项式进行插值的时候容易发生“龙格现象”,针对单一的多项式进行规划已经不能满足实际情况的要求。文献[5]采用S曲线插值,对机器人进行直线插补和圆弧插补。文献[6]提出了一种加速度为两种不同的频率组合而成的正弦函数轨迹规划方法。文献[7]为了克服正弦曲线和五次多项式插值的光顺性不好的问题,采用非均匀有理B样条对关节角度进行插值。这些轨迹规划方法没有与优化原则很好的综合考虑,有的只是单一对关节进行轨迹的插值,有一定的局限性。
针对关节轨迹精度不高以及轨迹优化的问题,本文以实验室深圳元创兴REBOT-V-6R机器人为研究对象,采用三次NURBS基于最短路程的优化原则下对机器人进行轨迹规划,并与三次多项式和三次B样条等轨迹规划方法进行对比分析,来验证此轨迹规划方法的有效性和可靠性。
1 关节空间轨迹规划
为了进行对比分析,分别采用三次多项式、三次B样条和三次NURBS在关节空间对机器人轨迹进行规划。根据已知的工作空间原始路径点,利用机器人逆运动学公式反求出关节空间中各关节对应的角位移值。再根据各种规划方法中具体的求解算法求出相应的速度、加速度值,从而得到各关节轨迹曲线。
1.1 三次多项式样条
三次多项式样条中,任意两节点之间是由三次多项式拟合生成的曲线段。三次多项式表达式中共有四个未知系数,对其求一阶、二阶导,可求出机器人末端关于时间t的速度、加速度的函数式[8]:
θ(t)=a0+a1t+a2t2+a3t3
(1)
(2)
(3)
其中,与始末时间点t0、tf对应的角位移θ0和θf为已知,且满足条件:
(4)
在每段多项式始末两点处满足二阶连续,设置始末点的速度、加速度,且满足条件:
(5)
每个点的角位移值已知,设定其角速度和角加速度为一常数,两点共可得到四个已知条件。将已知条件代入公式(1)~公式(3)中并联立求解,可解出全部未知的系数。
1.2 三次 B样条
B样条是一种特殊的NURBS曲线,在B样条研究方法的基础上引入了权因子等概念参数就变成了非均匀有理B样条,即NURBS曲线。具体的理论知识在1.3节会有详细的介绍。
1.3 三次NURBS曲线
NURBS又称为非均匀有理B样条,非均匀指的是控制顶点的影响程度可变;有理指的是表示曲线或曲面的方程加入权因子w(t);B样条则指的是在三个及以上控制点间插值构造曲线的方法。一条k次NURBS曲线可表示为一分段的矢值有理多项式函数[9]:
(6)
其中,wi称为权因子,首末权因子w0,wn>0,其余wi≥0,di为控制顶点,与权因子wi一一对应。Ni,k(u)是由德布尔-考克斯递推公式(7)推导的k次规范B样条基函数。
(7)
为确定与型值点Pi相对应的参数值ui+2,得对型值点进行参数化处理。通常对型值点实行参数化的方法一般有:均匀参数化法,向心参数化法和累积弦长参数化[10],这里采用累积弦长参数化。
其中B样条曲线上任意一点处的r阶导矢p(r)(u),u∈[ui,ui+1]∈[uk,un+1]的求解公式如下:
(8)
(9)
根据公式(7)的递推公式,编写NURBS基函数方便调用。部分程序如下:
function out =NBbasefcn(i,k,u,t)
⋮
if u(i+k)-u(i)==0
xishu1=0;
else
xishu1=(t-u(i))/(u(i+k)-u(i));
end
if u(i+k+1)-u(i+1)==0
xishu2=0;
else
xishu2=(u(i+k+1)-t)/(u(i+k+1)-u(i+1));
end
out= xishu1* NBbasefcn (i,k-1,u,t)+ xishu2* NBbasefcn (i+1,k-1,u,t);
end
公式(8)、公式(9)中的求导程序可根据MATLAB编写,其中需要调用NURBS基函数。但值得注意的是:关于NURBS曲线的求导过程中,由于涉及到中间参数u求导,具体的求导公式如下。

(10)
(11)
式(10)和式(11)结合式(8)和式(9)可得到NURBS的各阶导数,更高阶次的导数问题方法类似。
2 机器人建模及轨迹优化
2.1 机器人建模
以实验室深圳元创兴REBOT-V-6R机器人为研究对象,通过D-H法建立机器人的几何模型,该机器人各关节及连杆参数如表1所示。
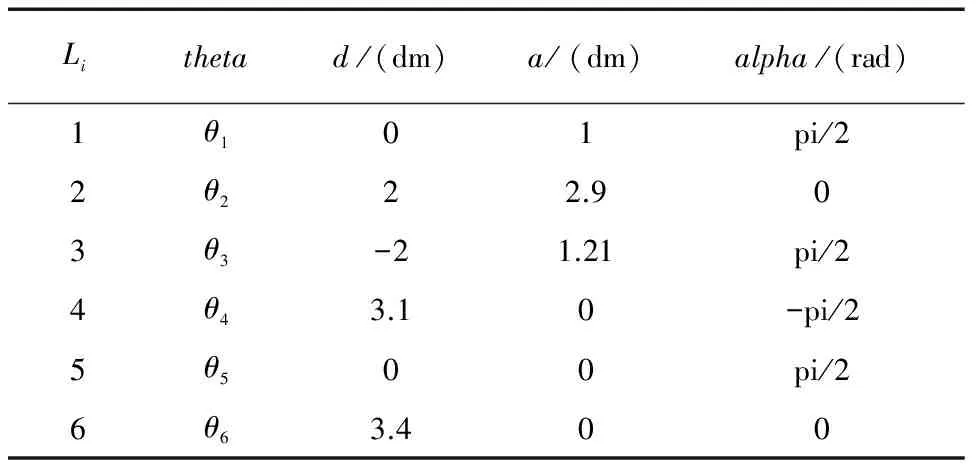
表1 六自由度机器人的D-H参数表
其中,Li为各关节编号,theta为关节变量,d为连杆偏移量,a为连杆长度,alpha连杆扭角。机器人在初始的姿态下,机器人末端在笛卡尔空间的三维坐标为[4.1 0 0.71],也称为零点坐标,综合精度和计算量的考虑,这里共取40个点。40个点的三维坐标如下:
X=[4.1 4.1 4.1 4.1 4.1 4.1 4.1 4.1 4.1 4.1 4.1 3.8 3.5 3.2 2.9 2.6 2.3 2 1.7 1.4 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.1 1.4 1.7 2 2.3 2.6 2.9 3.2 3.5 3.8];
Y=[0 0.3 0.6 0.9 1.2 1.5 1.8 2.1 2.4 2.7 3 3 3 3 3 3 3 3 3 3 3 2.7 2.4 2.1 1.8 1.5 1.2 0.9 0.6 0.3 0 0 0 0 0 0 0 0 0 0];
Z方向坐标值均为0.71。
2.2 轨迹优化
机器人在运动学反解的过程中会出现多解的情况,在避免碰撞的前提下,通常按照“最短行程”的准则来选择,即选择一组6关节移动量最小的解。实际算法中可以对6个关节作加权处理,遵照“多移动小关节,少移动大关节”原则。在工业机器人中,大关节一般指前3个关节,小关节一般指后3个关节[11]。选取各关节加权系数k1,k2,k3,…k6,具体的公式如下:
(12)
这里以建立的机器人模型为对象,以机器人末端为作业点,使末端在三维空间中画一个矩形,为了计算方便,机器人在画图过程中末端的姿态保持不变。为便于观察,以机器人零点为矩形的一个顶点。
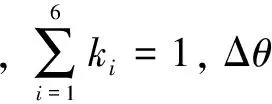
根据运动学正逆解公式,用MATLAB编写逆运动学求解程序,在基于最短路程原则的情况下对机器人的轨迹进行优化,分别求出机器人各关节对应的三次多项式、三次B样条和三次NURBS运动曲线。三种规划方法均是关于时间t的函数,这里总时间t取为12s,对机器人每个关节都分别用三种规划方法进行规划。对求出的三次多项式、三次B样条和三次NURBS三种曲线依次求导,可得到各关节运动轨迹的角速度、角加速度。为便于观察比较,从图中任意截取一段,这里取t=[4.5s,5.5s]时间段,且只列出1、2、3关节基于三种轨迹规划的运动曲线,得到机器人关节1,关节2,关节3的运动曲线见图1、图2和图3。
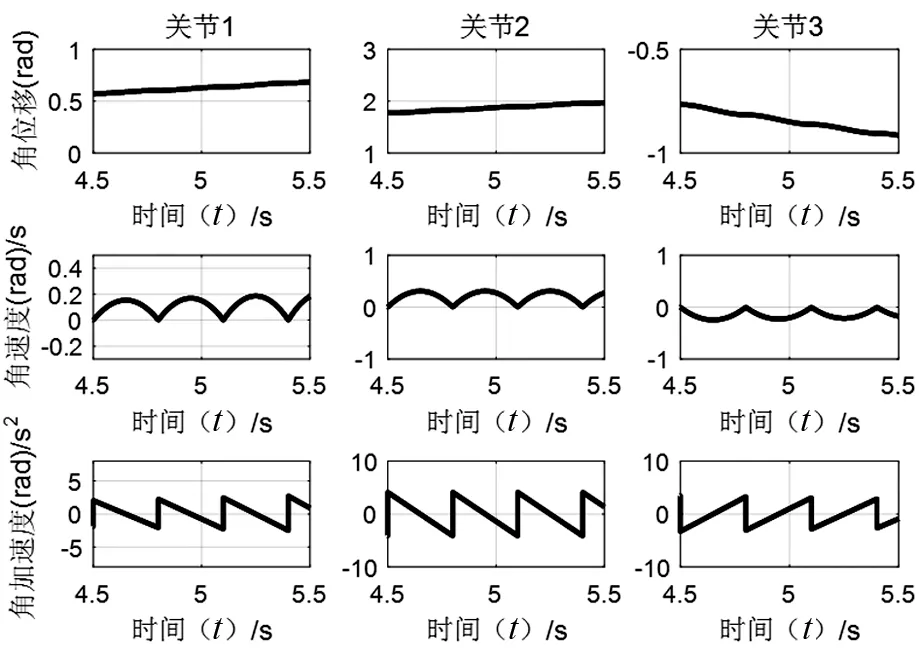
图1 截取的三次多项式规划1~3关节运动曲线
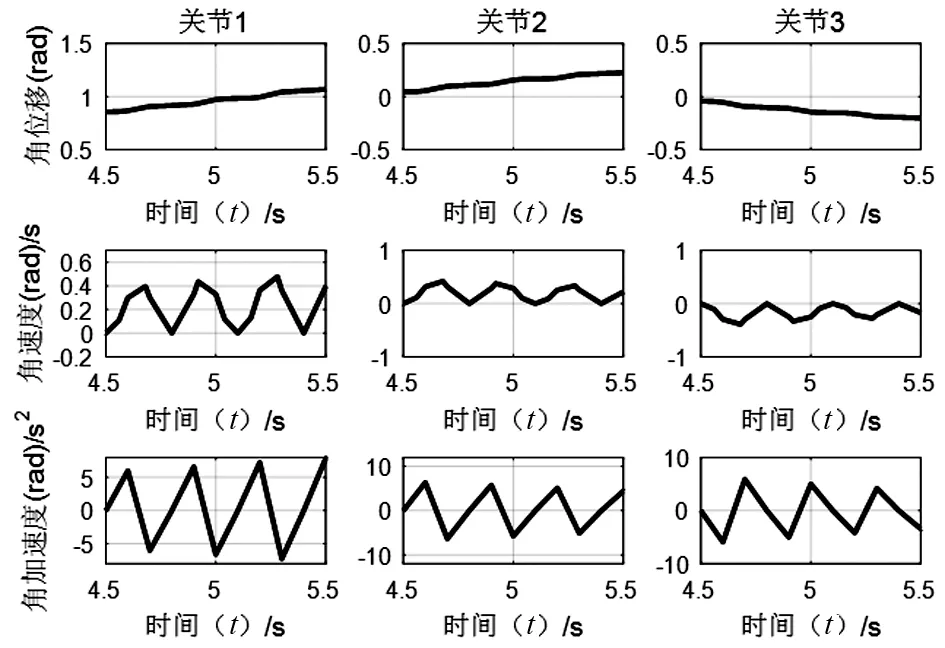
图2 截取的三次B样条规划1~3关节运动曲线
图3 截取的三次NURBS规划1~3关节运动曲线
由图1~图3可以看出,在[4.5,5.5]区间内,三种规划方法得到的角位移曲线的趋势差别不大,但三次NURBS的角位移曲线比另外两种曲线更平缓;三次多项式和三次B样条的角速度趋势相差不大,范围都在[0,0.4]之间上下波动,但三次NURBS的角速度范围在0.2上下波动,且都比另两种曲线光滑,曲线近似一条直线;三次多项式和三次B样条的角加速度趋势相差不大,范围都在[-7,7]之间上下波动,形状近似于锯齿形,而三次NURBS的范围大小接近于0,曲线近似一条直线,且都比另两种曲线光滑。因此基于最短行程的三次NURBS规划方法可使机器人性能更稳定,寿命更长。
3 结论
为进一步提高轨迹规划的精度,减轻振动和冲击,延长机器人使用寿命,以实验室REBOT-V-6R机器人为研究对象,分别采用三次多项式、三次B样条和三次NURBS且都基于最短路程原则对机器人轨迹进行规划。规划结果表明,采用三次NURBS规划的角位移、角速度、角加速度都较光滑,连续没有突变,而且在运动过程中角速度和角加速度都小于另两种规划方法,轨迹规划精度更高。在不考虑计算量的状况下,三次NURBS轨迹规划方法的运动性能优于三次多项式样条和三次B样条,是一种稳定可靠的轨迹规划方法。
[1] 孙亮,马江,阮晓钢.六自由度机械臂轨迹规划与仿真研究[J]. 控制工程,2010,17(3):388-392.
[2] 王学林,邢仁鹏,肖永飞,等.机械臂途经N路径点的连续轨迹插补算法研究[J].组合机床与自动化加工技术,2014(11):92-96.
[3] 陈伟华,张铁,崔敏其.基于五次多项式过渡的机器人轨迹规划的研究[J].煤矿机械,2011,32(12):49-50.
[4] K Petrinec,Z Kovacic.The trajectory planning algorithm based on the continuity of jerk[C].Proceedings of the 15th Mediterranean on Control&Automation,Athens-Greece,2007:27-29.
[5] 朱晓春,屈波,孙来业,等. S曲线加减速控制方法研究[J]. 中国制造业信息化,2006,35(23):38-40.
[6] 田西勇,刘晓平,庄未. 基于组合正弦函数的机器人轨迹规划方法[J].机械工程与自动化,2008(1):136-138.
[7] 邵园园,玄冠涛,刘晶,等.逆向驱动焊接机器人NURBS轨迹规划[J].焊接学报,2014,35(6):9-12.
[8] 林仕高,刘晓麟,欧元贤.机械手笛卡尔空间轨迹规划研究[J].机械设计与制造,2013(3):49-52.
[9] 王国勋,舒启林,王军,等. NURBS直接插补技术中快速求值求导算法[J]. 东北大学学报(自然科学版),2012,33(7):1021-1024.
[10] 彭小军,宋绪丁. 不同参数化法对多项式NURBS插值曲线的影响[J]. 机械制造,2013(2):33-37.
[11] 叶伯生,郭显金,熊烁. 计及关节属性的6轴工业机器人反解算法[J]. 华中科技大学学报(自然科学版),2013,41(3):68-72.
BasedontheOptimizedofSix-DOFIndustrialRobotNURBSTrajectoryPlanning
YUE Ying , KU Wei , LU Yi , ZHANG Hai-wei , ZHAO Dong-lei
(School of Energy , Power and Mechanics Engineering , North China Electric Power University,Baoding Hebei 071000 ,China)
Base on the larger vibration and shock problems encountered in the movement of robot, in order to further improve the accuracy of trajectory planning, reduce the vibration and impact, extend the service life. in laboratory REBOT-V-6R robot as the research object, using thrice polynomial and thrice B spline and thrice NURBS based on the shortest path principle of robot path planning. The results show that the thrice NURBS could achieve smoother planning trajectory velocity and acceleration, continuous no mutation, robot trajectory precision is better, sports performance is better than that the remaining two methods.
industrial robot; NURBS; trajectory planning; optimization
1001-2265(2017)11-0041-03
10.13462/j.cnki.mmtamt.2017.11.011
2017-01-04;
2017-02-14
河北省自然科学基金项目(E2014502042);中央高校基本科研业务费专项资金项目(11QJ61)
乐英(1971—),女,河南信阳人,华北电力大学(保定)副教授,博士,研究方向为机器人运动控制技术,(E-mail)yueying71@163.com。
TH165;TG659
A
(编辑李秀敏)