基于欧拉法和消元法的平面六杆机构分支识别*
2017-07-31龚雅静杨智勇
王 君,龚雅静,汪 泉,任 军,杨智勇
(湖北工业大学 机械学院 机器人技术研究中心,武汉 430068)
基于欧拉法和消元法的平面六杆机构分支识别*
王 君,龚雅静,汪 泉,任 军,杨智勇
(湖北工业大学 机械学院 机器人技术研究中心,武汉 430068)
平面单自由度六杆机构分支和奇异点是研究连杆机构运动连续性的重要指标,针对Stephenson型单自由度平面六杆机构,提出一种识别机构所有分支的方法。基于欧拉环方程,结合三角换元、多项式判别法,首先提出一种分析平面六杆机构分支的理论方法,识别了机构所有分支并得到抑制机构运动的所有奇异点。其次联合Sylvester消元法,得到输入输出角同时在四杆链或不同时在四杆链条件下的输入输出关系曲线。最后通过实例分析与验证,结果表明此理论方法可准确迅速地得到平面六杆机构的可行运动域以及奇异点位置处机构的所有构型,为Stephenson型平面六杆机构的设计提供了一个简单有效的途径。
平面六杆机构;分支;奇异点;Sylvester消元法
0 引言
连杆机构的连续性和平稳性对于连杆机构的可动性[1]是非常重要的,奇异点[2]是抑制了机构的连续运动的所有点的总称,包括死点和分支点。机构的奇异点位置是机构在特定的几何条件下的固有特性,不随机构的输入输出而改变,但机构的分支特性曲线是随输入输出而改变的。判定机构的奇异点位置以及分支对于机构的平缓运动有很大的帮助。平面单自由度六杆机构是一种典型并联连杆机构,Stephenson六杆机构是最典型的平面单自由度六杆机构[3]之一。Ting K L、Wang J[4-6]等利用欧拉环方程以及半角公式,引入关节旋转空间的概念,根据平面六杆机构环路相互作用提出了机构死点判断的代数方法。沈惠平[7]运用POC法,对典型的多环耦合机构进行拓扑特性分析。韩建友[8]等基于解域综合理论,根据解曲线的映射构成平面六杆机构的平面解域,从而判定机构的分支及分支缺陷。然而,在实际运用中,不同的输入输出对平面六杆机构的运动顺序和运动曲线都有很大的影响。奇异点追踪法[9]、自动运动生成算法[10]、环路自动生成法[11-13]为平面多杆机构奇异点和分支识别提供了新的思路,但都是针对特定情况且主要解决机构环路的识别问题。到目前为止,没有一种具体的方法能得到平面六杆机构所有分支和奇异点以及奇异点处各个连杆的角度位置。本文在前人研究的基础上,基于Stephenson型单自由度平面六连杆机构,提出一种识别机构的所有分支和奇异点以及所有奇异点处各个连杆的具体位置理论方法,帮助解决了不同输入输出条件下机构运动中所有连杆的运动范围和运动顺序问题,为实际应用中机构运动的路径规划提供了一定的帮助。
1 平面六杆机构的奇异点识别
1.1 平面四杆链死点的识别
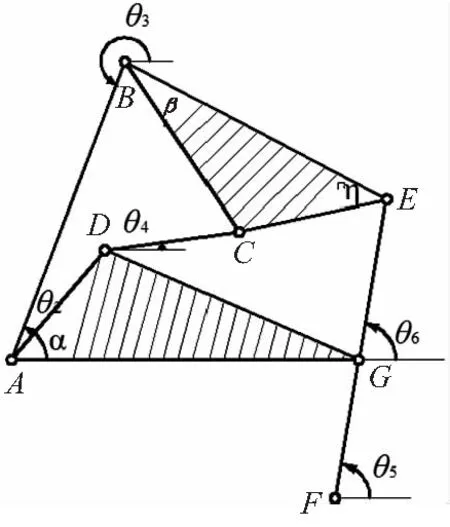
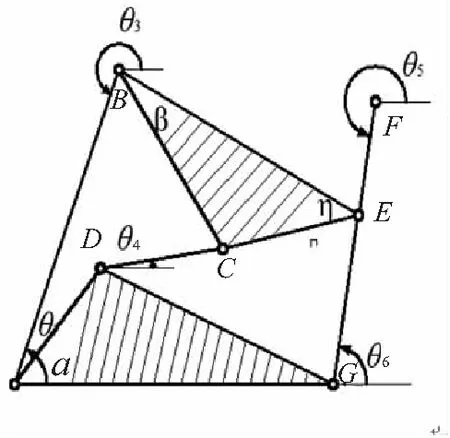
平面四杆链的分析是平面六杆机构分析的基础,图1中的两个机构均由四杆链ABCD和外双杆组EFG组成[14]。
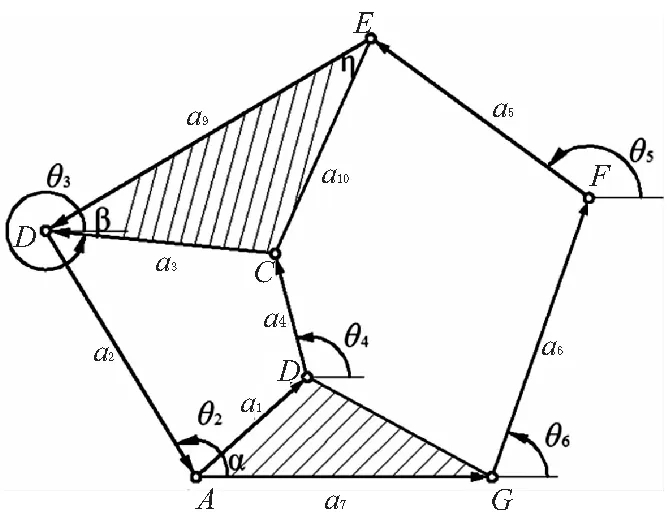
图1 平面六杆机构
如图1所示,根据欧拉公式,四杆链ABCD环方程为:
a2eiθ2+a3eiθ3=a1eiθ1+a4eiθ4
(1)
将上述环方程以逆时针方向分别向X、Y轴投影,可得:
cosθ4=(a2cosθ2+a3cosθ3-a1cosα)/a4
(2)
sinθ4=(a2sinθ2+a3sinθ3-a1sinα)/a4
(3)
根据三角函数平方和公式消去θ4,方程(1)整理得:

(4)

(5)
式中:

cosθ2-2a1a2sinθ2sinα;
B1=4a2a3sinθ2-4a1a3sinα;
cosθ2-2a1a2sinθ2sinα
若要四杆机构在某构型条件下能正常运动,A1≠0时,方程(5)的判别式必须满足:
(6)
判别式Δ1是以θ2为自变量的方程。当Δ1=0时,表示四杆机构处在死点位置;当Δ1>0时,θ3有两个解,与之对应是四杆链的两种构型,通过方程(7)及方程(8)可以求出。这种死点判别方法只基于输入输出关系。由方程(6),可通过输入角θ2得输出角θ3:
(7)
(8)
1.2 二级杆组对平面六杆机构的影响


(a) 极限位置1
(b) 极限位置2
(c) 极限位置3图2 平面六杆机构的3种极限位置
当平面六杆机构处于正常运动状态时,外五环ABEFG可列欧拉方程:
a2eiθ2+a9ei(θ3+β)=a7+a5eiθ5+a6eiθ6
(9)
将上述方程分别向X、Y轴投影,并消去θ5可得三个角度(θ2、θ3、θ6)之间的相关关系,利用半角公式x5=tan(θ5/2),得到关于x5的一元二次方程:
(10)
通过方程(10),可得:
其中:
θ5[1]=2arctan(x5[1])
(11)
(12)
同样,根据外五环欧拉环方程,可得θ6。
当平面六杆机构中外双杆组处于极限位置时,会限制原平面六杆机构中的构成部分,也就是平面四杆链的运动,当平面六杆链处于极限位置1时,即二级杆组处于拉伸状态时,其环方程为:
a2eiθ2+a9ei(θ3+β)=a7+(a5+a6)eiθ6
(13)
消去θ6,可得:
[a2cosθ2+a9cos(θ3+β)-a7]2+
[a2sinθ2+a9sin(θ3+β)]2-(a5+a6)2=0
(14)
同样,平面六杆机构处于另两种极限位置2、3时,即二级杆组处于重叠状态时,其欧拉方程为:
a2eiθ2+a9ei(θ3+β)=a7+|a5-a6|eiθ6
(15)
经过三角消元后可得:

(16)
EG两点距离为:

(17)
2 输入输出关系识别
上述情况将Stephenson型单自由度平面六杆机构分为四杆链以及二级杆组,分别解释了其对平面六杆机构运动的抑制作用。由于将机构拆分,整个机构的分支识别以及输入输出关系识别可分为两种情况:①输入输出角同在四环链;②输入输出角不同在四环链。
2.1 输入角及输出角同在四环链ABCD
当四杆链处于正常运动时无死点限制时,机构在此两极限的运动范围内,是可以完全旋转的。联立方程(4)、方程(14)及方程(16)可得输入角及输出角在四环链时,Stephenson型单自由度平面六杆机构的有效分支。
在此情况中,可得θ2、θ3、θ4两两之间的相关关系。如图3所示,是图1所示某Stephenson型单自由度平面六杆机构的θ2-θ3的分支曲线,其中曲线1是方程(14)所示的极限位置曲线,即二级杆组处于图2a所示的拉伸状态;曲线2是方程(16)所示的极限位置曲线,即二级杆组处于图2b或图2c所示的拉伸状态;曲线3是方程(4)所示的四杆链输入输出分支。图3中,曲线3与曲线2有6个交点,与曲线1没有交点。这6个交点将平面六连杆的运动曲线分成1-2、3-4、5-6三个有效运动部分,曲线上的每一点表示θ2、θ3的一一对应关系。通过图3及极限位置交点,可以得到平面六杆机构的分支和每个分支的运动范围和分支的运动顺序。根据方程(6),可得四杆链的死点m、n,其中m在有效分支3-4中,n在有效分支1-2中,因此四杆链死点m、n均有效。
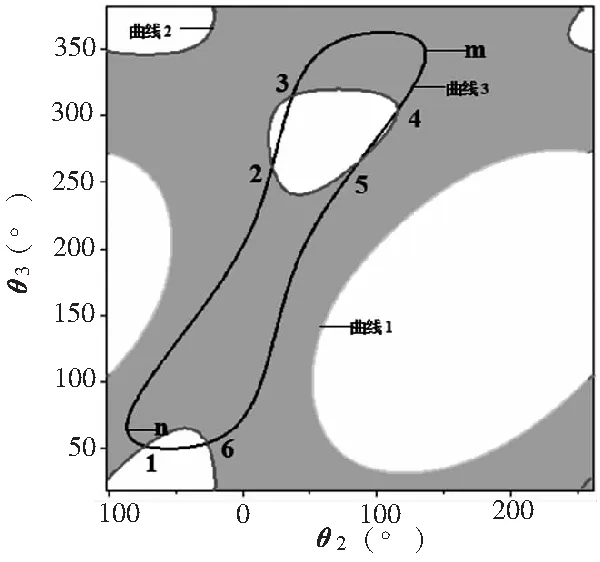
图3 θ2-θ3输入输出曲线图
2.2 输入角及输出角不同在四环链ABCD
上述分析过程中通过消元法消掉θ5及θ6,而当输入角或输出角不在四环链时,需消去其他无关角。如当以θ6为输入角,θ2为输出角时,在外五环ABEFG中,建立欧拉环方程,消去θ5,可得θ2、θ3及θ6之间的相关关系,在此形式下,联立方程(5)、方程(10),采用Sylvester消元法,建立6阶方阵:
(18)

(19)
再利用半角公式,令x6=tan(θ6/2),x2=tan(θ6/2),带入方程(17),可得:
(20)
当连杆机构处于分支点位置时,以θ6为自变量,θ2为因变量时,方程(18)的判别式必须满足:
Δf=N(x6)/M(x6)≥0
(21)
其中,N(x6)=0、M(x6)≠0时,机构处于分支点位置。如图4所示,为图1所示某Stephenson型单自由度平面六杆机构的θ2-θ6的输入输出关系曲线,图3与图4机构的尺寸参数一致,虽然输入输出变化了,但机构仍然是6个分支点,根据图4,也可判别机构的3个分支:1-2、3-4、5-6。

图4 θ2-θ6输入输出曲线图
同样,以θ2为输入角,θ5为输出角时,以上述方法消去θ6,可得θ2-θ5输入输出关系曲线。根据上述理论分析,得到了以不同输入输出为基础的各个角度的输入输出曲线图。
3 机构分支及奇异点判断实例
如图1所示的平面六杆机构,其尺寸参数如表1所示。
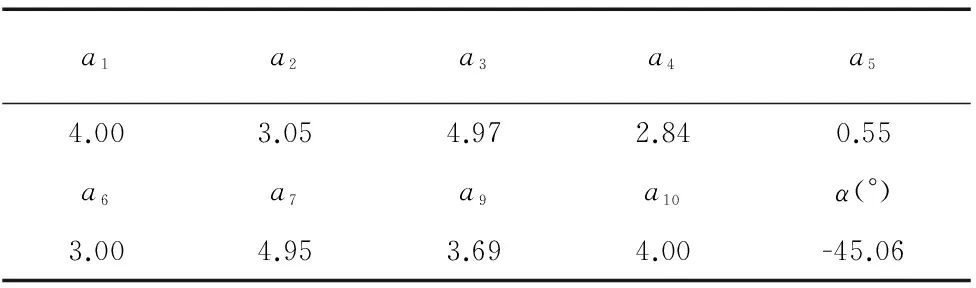
表1 平面六杆机构尺寸参数
根据实例中平面六杆机构的尺寸参数,可得当输入角及输出角同在四环链内时,两两之间的输入输出关系。如图5所示,是实例中平面六杆机构θ2-θ4输入输出关系曲线。根据2.1节分析过程,曲线3与曲线1、2分别交于12个点交点,其将平面六杆的运动曲线分成1-2、3-4、5-6、7-8、9-10、11-12六个有效运动部分。其中,1、4、5、8、9、12点表示二级杆组处于重叠状态;而2、3、6、7、10、11点位置表示二级杆组处于拉伸状态。
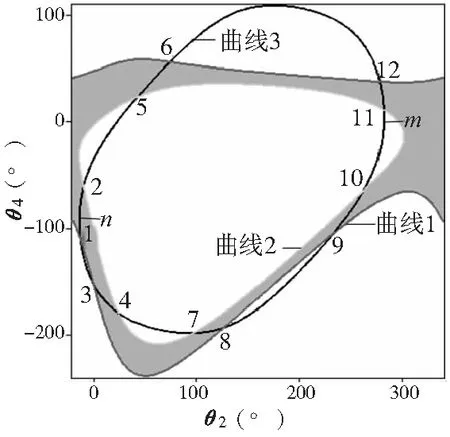
图5 θ2-θ4输入输出曲线图
如图6所示,是θ2-θ5输入输出关系曲线,其输入输出不同时在四环链,首先根据方程(5)及方程(10),得到6阶方阵,进而根据方程(19),可得两者之间的关系。

图6 θ2-θ5输入输出曲线图
在两两连杆输入输出关系的基础上,根据方程(7)、方程(8)及方程(11)、方程(12),得到二级杆组处于极限位置时,各个连杆的角度,如表2所示。表2中各个分支点与图5及图6中所示的分支点一一对应。以θ2为例,可知,在机构的一个轮回运动中,12个分支点将机构分成6个可行运动域,根据图5可知以θ2为输入角时机构的分支运动顺序,并且,6个分支θ2的运动范围分别是:-12.29°~9.36°、0.22°~24.61°、42.92°~74.44°、97.30°~127.14°、233.46°~263.17°、279.26°~283.08°。同理,可得到其余各杆在各个分支的运动范围。

表2 二级杆组处于极限位置
当Δ1=0时,四杆链处于极限位置,根据方程(6)可得可得四杆链的两个死点位置,其中m点处θ2的角度为283.23°、n点处θ2的角度为-13.39°。如图5所示,n点属于1-2有效运动部分,而m点不属于任何有效部分,因此m点不为整个六杆机构的死点。当六杆机构处于n点处,根据方程(11)、方程(12),θ5有两个解,也就是此时二级杆组EFG有两种不同的构型,如表3所示,当四杆链处于死点位置时,各个连杆的角度。
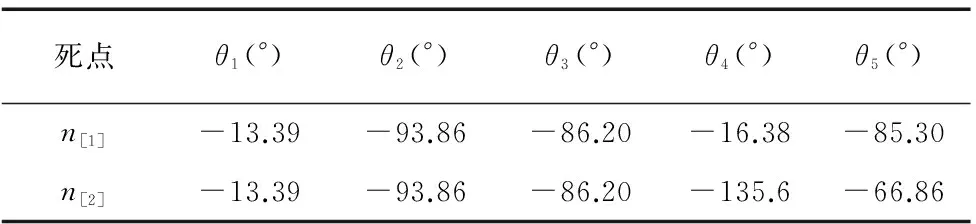
表3 四杆链死点
综上可知,在此机构参数下,根据提出的理论方法,分别得到输入输出(θ2、θ4)同在四环链的输入输出关系曲线图,输入输出(θ2、θ5)不同在四环链输入输出关系曲线图。两图相对应,都能得到平面六杆机构的6个分支以及12个分支点,说明机构的分支个数在一定参数下是确定的,不随机构的输入输出而改变,但机构的分支特性跟随机构的输入输出改变而改变。另外,对四杆链ABCD进行分析,可得机构在有效分支中的死点n两种不同的构型下,机构的各个连杆的运动角度,由表3可知,两种构型下,θ2、θ3、θ4角度不变,也就是说,此死点处,四杆链的构型不变,根据θ5、θ6的变化,表明此死点处二级杆组的构型是变化的。总体来说,此方法可准确得到平面六杆机构的所有分支、奇异点以及奇异点处所有连杆的位置。
4 结论
(1)建立欧拉环方程,对平面四杆链进行了识别,提出一种简单可行的方法对平面四杆链的死点进行了识别,并对五环链建立了欧拉方程,得到当五杆链处于极限位置时的环方程,将两环相结合,可迅速得到平面六连杆机构分支及抑制运动的分支点;
(2)利用Sylvester消元法,对两种不同条件下的平面六杆机构输入输出进行了识别,证明了机构的分支点位置以及分支是确定的,不随机构的输入输出的改变而改变,同时,根据分支识别图和极限位置点可得到整个机构各个分支的运动顺序及各个分支中各个连杆的运动范围;
(3)通过实例检验,得到平面六杆机构的所有奇异点以及奇异点处连杆的具体角度位置,证明了该方法的正确性和有效性,为进一步研究同类型的平面多杆机构提供了一定的理论依据,有助于探讨平面多杆机构研究的一般方法研究。
[1]TingKL.MobilityCriteriaofSingleloopN-barlinkages[J].JournalofMechanicalDesign,1989, 111(4): 504-507.
[2]TingKL,DouX.ClassificationandbranchidentificationofStephensonsix-barchains[J].Mechanism&MachineTheory,1996, 31(31):283-295.
[3]ChaseTR,MirthJA.CircuitsandBranchesofSingleDegreeofFreedomPlanarLinkages[J].JournalofMechanicalDesign,1993, 115(2):223-230.
[4]TingKL,XueC,WangJ,etal.StretchRotationandCompleteMobilityIdentificationofWattsix-barchains[J].Mechanism&MachineTheory,2008, 44(10): 1877-1886.
[5]TingKL,WangJ,XueC.FullRotatabilityandSingularityofSix-BarandGearedFive-BarLinkages[J].JournalofMechanismsandRobotics,2010,2(1):298-320.
[6]TingKL.OntheInputJointRotationSpaceandMobilityofLinkages[J].JournalofMechanicalDesign,2008,130(9):1404.
[7] 沈惠平, 邵国为, 朱小蓉, 等. 基于POC法的多环耦合并联机构拓扑特性分析 [J]. 农业机械学报, 2016, 47(4): 349-354.
[8] 韩建友, 崔光珍, 杨通. 六杆机构四位置运动生成的解域综合理论与方法 [J]. 北京航空航天大学学报, 2014, 40(9): 1170-1175.
[9]AlmestiriSM,MurrayAP,MyszkaDH.SingularityTracesofSingleDegree-of-FreedomPlanarLinkagesThatIncludePrismaticandRevoluteJoints[J].J.MechanismsRobotics, 2015, 8(5): 15-18.
[10]PlecnikMM,MccarthyJM.KinematicSynthesisofStephensonIIISix-barFunctionGenerators[J].Mechanism&MachineTheory,2016, 97(9):112-126.
[11]ParrishBE,MccarthyJM,EppsteinD.AutomatedGenerationofLinkageLoopEquationsforPlanarOneDegree-of-FreedomLinkages,Demonstratedupto8-Bar[J].J.MechanismsandRobotics,2015, 7(1): 14-22.
[12]WangJ,TingKL,XueC.BranchIdentificationofPlanarTwo-DOFSeven-BarLinkages[C]//InternationalDesignEngineeringTechnicalConferences&Computers&InformationinEngineeringConference.California:ASME, 2009: 1175-1182.
[13] 王君, 童明浩, 任军, 等. 平面二自由度七连杆机构分支自动识别研究 [J]. 现代制造工程, 2017(1): 35-41.
[14] 褚金奎, 郭晓宁.Stephenson六杆机构可动性研究 [J]. 机械工程学报, 2004, 40(1): 26-34.
(编辑 李秀敏)
The Branch Identification of Planar Six-bar Linkages Based on Eulier’s Formula and Elimination Method
WANG Jun,GONG Ya-jing,WANG Quan,REN Jun,YANG Zhi-yong
(Center for Robotics Research, School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China)
Singularity and branch are the important indexes to study the motion continuity of one-DOF planar six-bar linkages. This paper presents a theoretical method for the analysis of single-degree-of freedom Stephenson planar six-bar linkages. Firstly, based on Eulier’s formula, trigonometric polynomial and polynomial discriminant, this paper proposes a method to identify all branches and singularities of planar six-bar linkages. Secondly, with Sylvester’s elimination method, the input and output curves are obtained. Finally, an example is given to demonstrate this method. The results reveal that this method can accurately get all the feasible motion field and all angles of planar six-bar linkages at the singular positions. This method provides a simple and effective way for the design of planar six-bar linkages.
planar six-bar linkage; branches; singularities; Sylvester elimination method
1001-2265(2017)07-0077-05
10.13462/j.cnki.mmtamt.2017.07.018
2017-03-14;
2017-03-21
国家自然科学基金项目(51405140);湖北省自然科学基金重点项目(2015CFA112);湖北省教育厅优秀中青年科技创新团队(T201505)
王君(1977—),男,湖北蕲春人,湖北工业大学教授,博士,研究方向为机构学及机器人技术,(E-mail)junwang@mail.hbut.edu.cn。
TH112.1;TG659
A