三自由度并联机构的位置及工作空间分析*
2017-07-31黄亚太林光春
黄亚太,林光春,黄 亮
(四川大学 制造科学与工程学院,成都 610065)
三自由度并联机构的位置及工作空间分析*
黄亚太,林光春,黄 亮
(四川大学 制造科学与工程学院,成都 610065)
提出了一种面向重工业的三自由度并联机构(3RPS-3UPS)。对其机构进行分析,基于符号法建立了机构位置分析的数学模型。利用齐次位姿变换建立机构运动约束方程并应用结式消元法求得位置正解的封闭解。通过分析求得工作空间的边界条件,并结合位置分析进行工作空间分析的推导。最后应用MATLAB软件编程,结合实例进行位置正解以及工作空间计算,验证了该机构的位置正解方法与工作空间分析方法的有效性,为该机构的速度、加速度分析与动力学分析奠定了基础,并为机构的参数优化提供了理论依据。
三自由度并联机构;位置分析;工作空间
0 引言
并联机构相对于串联机构具有很多优势,如制造成本低、结构紧凑、刚度高、承载能力强、自重负载比小、运动精度高且在位置分析时并联机构很容易得到反解而机器人在实时控制上正需要解其位置反解等。并联机构在种种方面弥补了串联机构的不足,进而引起了国内外学者的广泛兴趣与重视,已成为当下研究与应用的热点[1-3]。
针对空间三自由度并联机构,由于此类机构属于欠秩机构,其工作空间内不同点的运动形式不同[4],从而使并联机构的位置正解求解较为复杂,一般方法分为数值法与符号法[5]。而对于该类机构的工作空间分析方法目前只有数值解法。国内对三自由度空间并联机构位置与工作空间分析的研究,韩方元[6]等得出了一种3-RPS机构位置分析正解的快速数值算法,姚翔[7]等对某三自由度并联机构进行了位置与运动学分析,孙江宏[8]等应用螺旋理论对某微动并联机构做了自由度与工作空间分析,鲁开讲[9]等对3-RPS机构的奇异位形及工作空间进行了研究,叶冬明[10]等对某新型三自由度并联机构进行了工作空间分析。虽然对位置分析数值法的应用较为普遍,如牛顿迭代法、遗传算法等,但数值方法始终难以解决其计算速度慢、迭代时间长、初始解较难确定等问题,而符号法又很难得到其封闭解,因而一直阻碍该类机构的研究发展,而工作空间分析则由于初始离散变量较多,其运算速度较低。
本文提出了一种三自由度空间并联机构3RPS-3UPS,基于符号法通过齐次位姿变换建立机构运动约束方程并应用结式消元法求得位置正解的单变元输入输出方程,从而得出位置正解的封闭解,由于该方法基于符号运算,其运算速度较数值法快,且结果精度高,为进一步对其动力学分析、位置控制等奠定了基础。之后在此基础上借助MATLAB软件根据实例通过空间搜索法编程求解工作空间,为其参数优化及实际应用提供了理论依据。
1 3RPS-3UPS并联机构结构分析
该3RPS-3UPS机构静平台上按120°均分有三个转动副和三个虎克铰,动平台上按120°固联六个球副,静平台与动平台之间通过中心对称分布的三条闭环子链连接,每个闭环子链又由两条支链构成,一条为RRS另一条为UPS,该机构运动输入为静平台固联虎克铰与动平台的球副之间的移动副,通过控制三根输入杆长的长度变化即可控制动平台位姿。此机构的结构与3-RPS机构类似,同样具备3-RPS结构紧凑、局域性运动灵活度高、响应快、运动精度高、无累计误差影响、机构各分支单链中心对称分布具有良好的对中性等优点,此外与RPS相比该机构强度更高、结构稳定性更好、承载能力更强,使其在重工业特定场合具有重要用途。
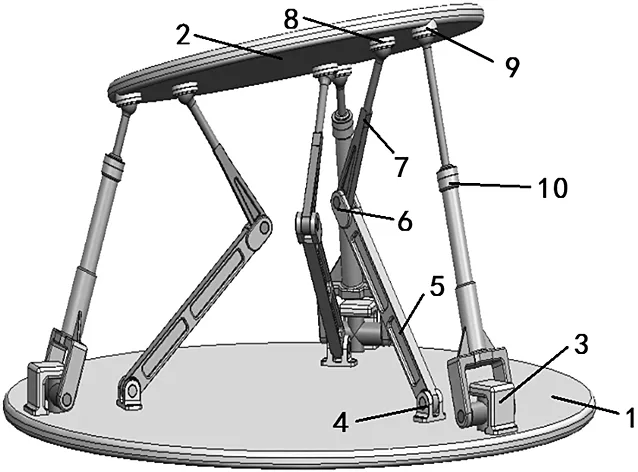
1.静平台 2.动平台 3.静平台固联虎克铰 4.静平台固联转动铰 5.静平台连杆 6.转动铰链 7.动平台连杆 8.动平台固联球铰1 9.动平台固联球铰2 10.移动副图1 机构三维模型图
2 位置分析
首先对该三自由度并联机构进行坐标系定义,以静平台圆心为静坐标系原点,Z轴垂直于静平台向上,X轴延E1方向,以动平台圆心为原点建立动坐标系,定义垂直与平台向上方向为Z轴,O1C1方向为X轴。
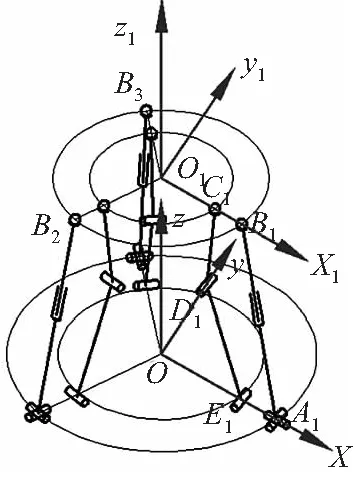
图2 机构坐标图
用Z-Y-X欧拉角[11]表示动平台中心点姿态,则动静坐标系齐次转换矩阵:
(1)
A点在静坐标系中的位置矢量为:
(2)
其中,ra为静平台A点半径;
C、B点在动坐标系中的位置矢量为:
(3)
其中,rb为动平台B点半径;
rc为动平台C点半径;
B、C点经齐次变换后在静坐标系中的位置矢量为:
(4)
根据自由度分析可知,有结构约束:
(5)
代入化简可得如下关系:
(6)
(7)
其中,amn与bmn由机构结构参数ra、rb、rc、L确定。
之后通过Stylvester结式消元法[12]对x、y组成的高次多变元非线性方程式(7)进行消元得出单变元的非线性方程Sy(x):
(8)
解出x后回代入式(7)中解出y,由x、y可得β与γ,最后带入式(6)即可得到机构位姿的其余参数,从而得出该机构位置分析的封闭解。相对于数值算法对每个离散点分别计算,要想得到精度较高的结果必然会造成速度下降。该方法基于符号运算,所得为单变元的输入输出方程,只需将参数数据带入方程即可求得其位置正解,提升了其计算速度。
3 工作空间分析
机构的工作空间分析研究的是末端执行器坐标系原点在空间活动的最大范围,对本机构则为动平台坐标系原点O1的运动范围。利用空间搜索法求解工作空间时,判定所取点是否属于工作空间主要考虑移动副长度范围、转动副球副虎克铰等的转角范围、杆件之间不发生干涉条件等因素,根据以上三种因素,有机构位型约束条件:
其中,li=输入杆长度,θi=关节转角,Di=杆件间距离;

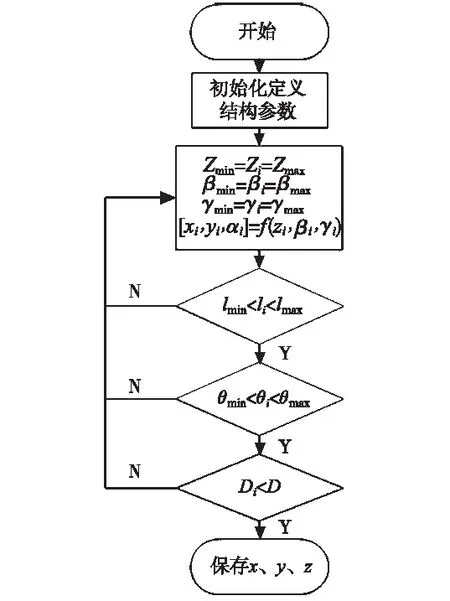
图3 工作空间计算逻辑流程图
如图3所示,这里计算时首先沿Z轴对工作空间进行分层,每层再对欧拉角β,γ进行离散,根据式(6)求得动平台其余运动参数x,y,α,再根据式(1)求得齐次位姿变换矩阵M后即可带入式(4)求得静平台坐标系下机构各点坐标,最后判断该位型是否满足约束因素,若不满足条件,直接计算下一点;若满足则储存该点(x,y,z)坐标,并继续计算下一点。由于仅需离散三个位姿参数,并利用结构约束方程快速求得其余参数,其所需带入计算的离散点数呈指数减少,相对于将全部位姿离散后再带入计算,其计算速度较快,具有较高的计算效率。
4 实例分析
由该机构坐标图(图2),该结构主要结构尺寸为静平台A、E点半径ra、re,动平台中B、C点半径rb、rc,动静平台连杆长度lcd、led,以及A、B点间杆长L的变化范围,现给出实际情况下一组结构尺寸,见表1。

表1 结构参数方案 单位/mm
4.1 位置正解实例分析
根据结构参数,令L1=700、L2=580、L3=640,带入式(8)解出x,筛选出其中实数项并分别带入式(7)中解出y,同样筛选其中实数项,根据各组x、y求得β、γ后分别带入式(6)中求出其余位姿参数,最后得到32组参数,节约篇幅取其中8组,见表2。
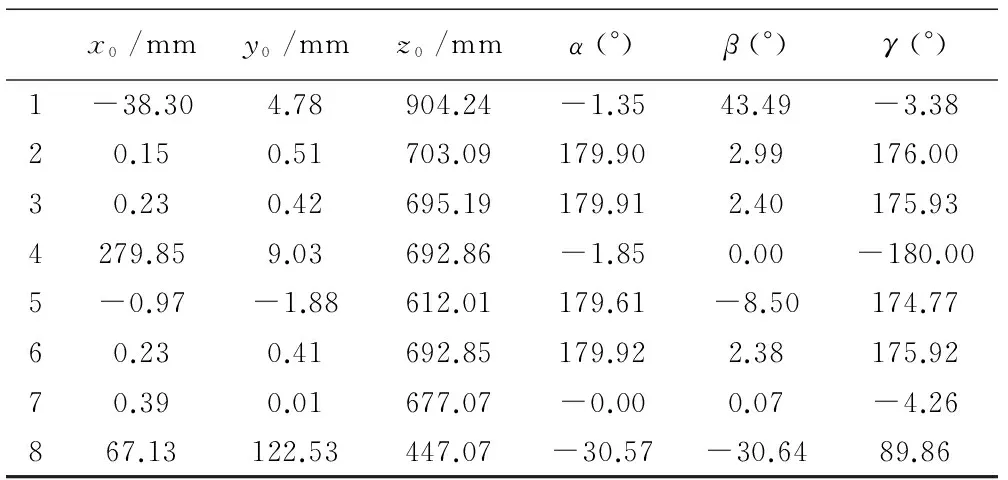
表2 位置正解结果矩阵

图4 正解结果绘图
根据工作空间分析所得机构位型约束条件,其中第5组解机构位置如图4所示。
4.2 工作空间实例分析
根据工作空间结果可得,该3RPS-3UPS机构工作空间呈中心120°对称分布,工作空间的边界形状较为规则,且其水平层面上的运动范围相对于高度的变化范围小很多,见图5~图7。对于该机构,XoY层面上动平台工作半径是评价机构运动性能的重要参数指标,根据图8可以看出其工作半径的变化趋势。
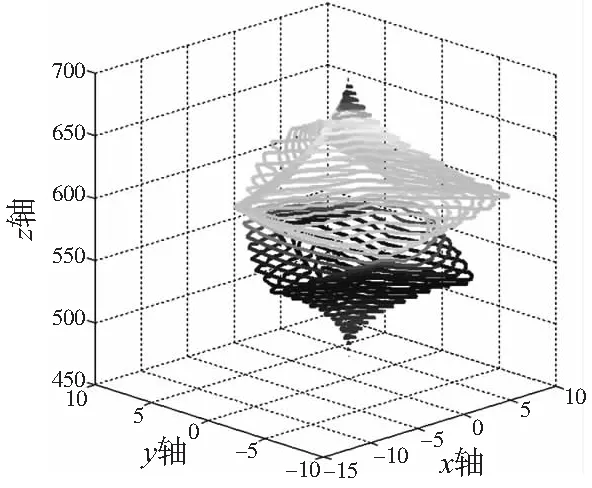
图5 工作空间三维表面图
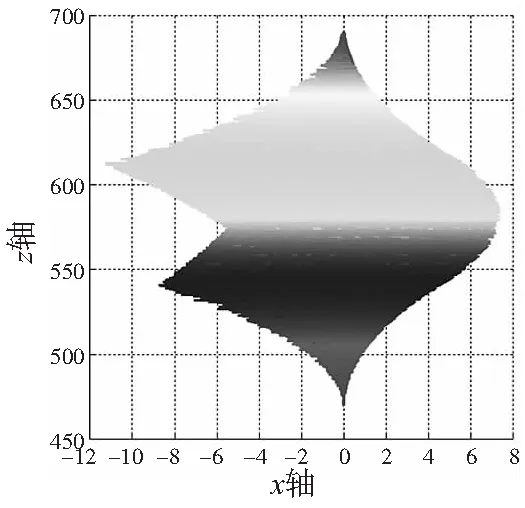
图6 动平台位置空间y向云图
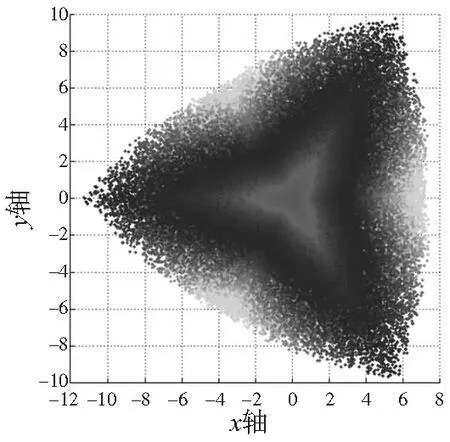
图7 动平台位置空间Z向云图
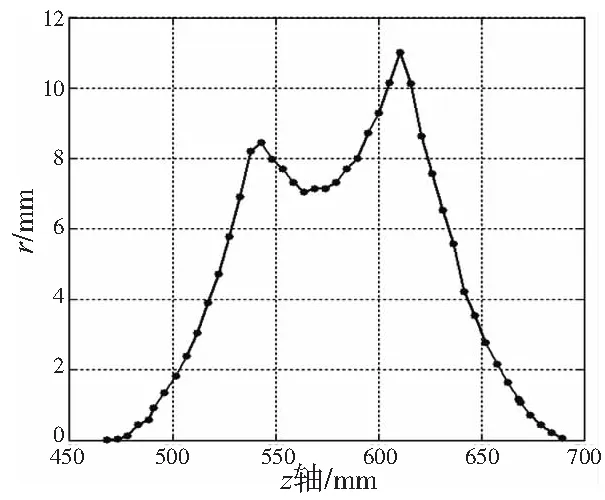
图8 动平台极限工作半径位置Z向分布图
5 结论
提出了一种结构紧凑、制造成本低、承载能力强的三自由度并联机构(3RPS-3UPS),计算了该机构的自由度,建立了其位置分析的数学模型并进行工作空间分析。通过MATLAB软件对位置分析及工作空间分析进行了编程并计算了一组算例。根据算例验证了位置分析正解求解方法与工作空间分析求解方法的有效性。综上,本文研究了该三自由度并联机构(3RPS-3UPS)的位置与工作空间,为其实际应用提供了理论依据并为进一步对其动力学分析、位置控制及参数优化等奠定了基础。
[1] MERLET J P. Parallel robots [M]. Dordrecht:The Nether-lands: Kluwer Academic Publishers,2000.
[2] 张济,林光春,徐礼矩,等.可调球面三自由度并联机构的位置分析与动态仿真[J].机床与液压,2007,35(6):176-179.
[3] 刘宏伟,马质璞.3-PRS并联机构运动学分析及仿真[J].机械设计与制造,2012 (1):211-215.
[4] Hunt K H. Structural Kinematic of In parallel actuated Robot arms[J]. ASME Joumal of Mechanisms.Transmissions and Automation in Design,1983,105:705-712.
[5] 黄真,孔令富,方跃法.并联机器人机构学理论与控制[M].北京:机械工业出版社,1997.
[6] 韩方元,赵丁选,李天宇. 3-RPS并联机构正解快速数值算法[J].农业机械学报,2011,42(4):229-233.
[7] 姚翔,林光春,豆依玲.三自由度可调并联机构的位置与运动学分析[J].组合机床与自动化技工技术,2015(3):59-61.
[8] 孙江宏,牛晓辉,贾晓丽,等.2-PSS-PPU并联微动机器人的工作空间分析[J].机械设计与研究,2015,31(6):4-7.
[9] 鲁开讲,牛禄峰,刘亚茹,等.3-RPS并联机构奇异位形及工作空间研究[J].农业机械学报,2007,38(5):143-146.
[10] 叶冬明.新型三自由度并联机构工作空间分析[J].机械设计与制造,2012(2):199-201.
[11] 王云.基于3-RPS四足并联腿步行机器人的研究[D].秦皇岛:燕山大学,2014.
[12] 李盛前,谢小鹏.基于旋量理论和Sylvester结式法的6自由度机器人逆运动学求解[J].农业工程学报,2015,31(20):48-54.
[13] 严骋,杜忠华,沈磊,等.三自由度纯转动并联机构的工作空间分析[J].机床与液压,2014,42(23):87-92.
(编辑 李秀敏)
Position and Workspace Analysis of a 3-DOF Parallel Manipulator
HUANG Ya-tai,LIN Guang-chun,HUANG Liang
(School of Manufacturing Science and Engineering, Sichuan University,Chengdu 610065,China)
Proposed a 3-DOF Parallel Manipulator (3RPS-3UPS) for heavy industry.Set up the mathematical model of its position.Through the use of homogeneous pose transformation builded its constraint equations ,then use the resultant elimination method of elimination , obtained the forward-position′s solution of a closed form.By using of the position analysis′s results and the boundary conditions , analyszed its workspace.Finally,using the MATLAB software to program,through a actual example of position analysis of positive solution and workspace′s calculation, verify the analysis method of forward-position and workspace are feasible , laid the foundations for its velocity , acceleration and dynamic analysis , and will probide theoretical basis for parameters optimization of the mechanism.
3-DOF parallel manipulator; position analysis; workspace analysis
1001-2265(2017)07-0018-04
10.13462/j.cnki.mmtamt.2017.07.005
2016-09-14;
2016-10-22
泸州市科技计划项目(2015CDLZ-S02)
黄亚太(1991—),男,郑州人,四川大学硕士研究生,研究方向为机构及机器人学,(E-mail)clogs_hat@163.com。
TH124;TG659
A