6R轻量化关节机器人的静刚度建模及分析
2017-07-17高晓飞李春书齐立哲闫尧
高晓飞,李春书,齐立哲,闫尧
(1.河北工业大学机械工程学院,天津300130;2.智通机器人有限公司研发部,天津301739)
6R轻量化关节机器人的静刚度建模及分析
高晓飞1,李春书1,齐立哲2,闫尧1
(1.河北工业大学机械工程学院,天津300130;2.智通机器人有限公司研发部,天津301739)
串联机器人末端的形变对机器人作业的精准性会产生影响,为了提高机器人的绝对定位精度,通过对6R轻量化关节机器人末端挠性变形的分析研究,综合考虑了包括伺服电机传动变形和谐波减速器传动变形在内的关节变形,以及机器人各个臂杆末端的弯曲变形、扭转变形和拉伸变形,分别建立了机器人关节和臂杆的静刚度模型.然后,分析了基于该刚度模型的关节变形和臂杆变形分别在机器人末端的映射关系,得到了机器人末端的总挠度变形.最后,基于机器人的刚度模型利用Matlab分析软件对实例进行分析,所得结果与其利用有限元分析的结果相对比,验证了静刚度模型的正确性和有效性.其对轻量化机器人的设计分析及其运动控制具有指导作用.
轻量化串联机器人;静刚度模型;关节变形;臂杆变形;有限元分析
0 前言
随着机器人技术的发展,工业机器人在实际工程中得到了广泛的应用.轻量化机器人相对于传统的工业机器人来说具有质量轻、体积小、易装配、控制灵活等特点[1],但是在某些精度要求比较高的任务作业中机器人末端的挠度变形不能被忽略,特别是对于机器人末端绝对定位精度要求较高的工作任务,如医疗、精密装配、喷涂等,必须将其末端变形控制在一定的范围内.因此,轻量化机器人在负载作用下既要满足强度要求,也要满足刚度要求.
目前,对于机器人刚度分析的方法主要有3种:1)忽略关节变形,建立臂杆刚度,研究臂杆变形与末端形变的关系[2-3];2)忽略臂杆变形,建立关节刚度,研究关节变形与末端形变的关系[4-6];3)综合考虑关节变形和臂杆变形在机器人末端的映射,建立整体的刚度模型,得出臂杆变形和关节变形分别与末端形变的映射关系[7-10].本文基于第3种研究方法针对6R关节机器人,通过建立关节和臂杆的静刚度模型,分析了关节变形和臂杆变形在机器人末端的映射关系,得出机器人末端的总挠度变形,为了更好的研究臂杆的壁厚变化对于机器人末端变形的影响,通过对电机和减速器的选型,减小关节变形,在一定的精度要求范围内忽略了关节变形,只研究了臂杆杆径的变化对于机器人变形的影响,并给出了验证.
1 机器人结构分析
1.1 机器人本体结构分析
图1所示的为6R关节式机器人,由腰部、大臂、小臂和腕部3个转动关节组成.机器人关节由驱动器、伺服电机、减速器和编码器等零部件组成,各臂杆均为空心圆杆,可将控制线放于机器人内腔中,使得整体结构简洁灵巧、装配方便.机器人关节和臂杆的接口为模块化接口,针对于不同的任务作业,能够更换不同参数的关节和臂杆,具有广泛的应用前景.
1.2 连杆坐标系的建立
采用D-H法建立6R机器人的连杆坐标系,如图2所示,机器人各连杆的D-H参数如表1所示.
设iRi-1为相邻杆系的变化矩阵,可表示为

图1 机器人本体Fig.1 The mechanical arm body

机器人末端坐标系在基坐标系下的转换矩阵表示为:

该矩阵可写成如式(2)表示的形式:
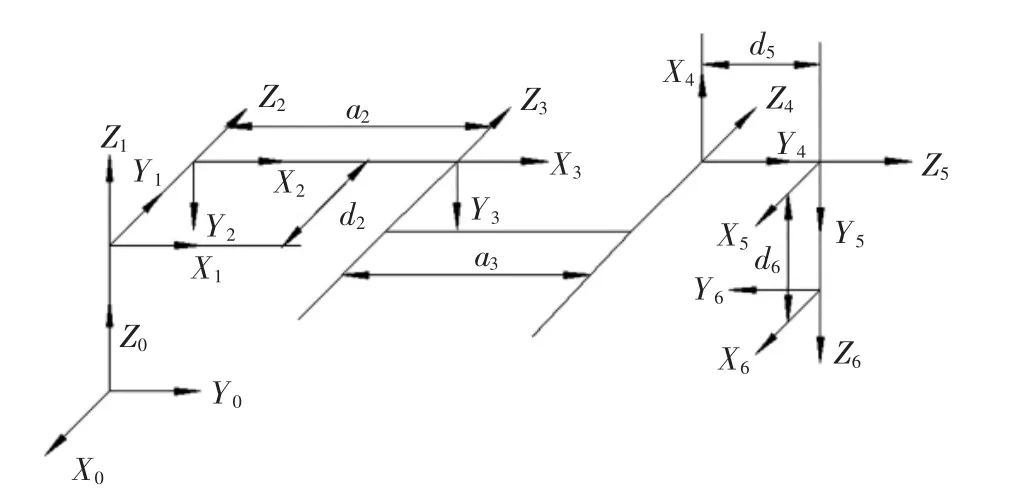
图2 机器人坐标系Fig.2 The mechanical arm coordinate system
式中:[nxnynz]T表示机器人末端x轴在基坐标系中的方向矢量;[oxoyoz]T表示机器人末端y轴在基坐标系中的方向矢量;[axayaz]T表示机器人末端z轴在基坐标系中的方向矢量;[pxpypz]T表示机器人末端在基坐标系中的位置矢量.

表1 连杆参数Tab.1 Parameters of connecting rod
2 静刚度模型的建立
2.1 建立关节刚度模型
机器人末端的挠度变形主要来源于各关节变形和臂杆变形,针对于本课题研究的机器人,关节变形主要考虑谐波减速器传动变形和电机的传动变形,而臂杆变形主要考虑机器人臂杆的弯曲变形、拉伸变形和扭转变形.
该机器人选用科尔摩根伺服电机,型号为KBM57和KBM43,该电机的扭转刚度为

式中:t为电机的机械时间常数,s;J为电机转子的转动惯量,kg·m2.
减速器选用哈默纳克谐波减速器,型号为HDSHD14-80和HDSHD17-50,其刚度K谐为

式中:T为传递扭矩;Ψ为转角误差.则关节的等效刚度K等效为

关节i的变形量Δδθi和所传递力矩τi的关系为

其写成矩阵形式,可表示为

建立速度雅可比矩阵Δ=JΔδθ和力雅可比矩阵σ=JTF,定义刚度矩阵为Kz=F/ΔX.
其中:F为机器人臂杆末端广义力;ΔX为末端广义变形,联立可得

根据关节的结构组成得到关节变形在机器人臂杆末端的映射为

2.2 建立臂杆刚度模型
把机器人臂杆当作一个弹性体处理,假设臂杆的材料均匀,各向同性,本构关系满足胡克定律,各杆的横截面面积相等,不考虑偏心,杆的变形满足柔性杆小变形假设理论[7],柔性杆的变形包括拉伸变形、弯曲变形和扭转变形,如图3所示.

图3 柔性杆变形Fig.3 Deformation of flexible rod
图3中Δxi1和Δxi2分别表示臂杆在关节力Fxi、弯矩Mxi作用下产生的x方向的变形;Δyi1和Δyi2分别表示臂杆受到关节力Fyi、弯矩Myi产生的y方向的变形,Δli表示臂杆受到Fzi作用产生的z方向的变形,Δoi是由于臂杆受到扭矩Ti产生的扭转变形.由胡克定律可以得到:

式中:Ai为臂杆截面面积;EIi为臂杆i的弯曲刚度;GIi表示扭转刚度;且当机器人臂杆的外径为D,内外径比值为α时,弯曲惯性矩和扭转惯性矩可分别表示为

机器人臂杆的刚度矩阵可表示为

则机器人臂杆的末端变形量的表达式为

如图4所示,不考虑机器人末端形变时,机器人末端的坐标系在基坐标系中的表达为Σ6,考虑机器人末端形变时,其末端坐标系在基坐标系中的表达为Σ6′.设由Σ6到Σ6′的变换矩阵为ΔT,变形后的坐标转换矩阵0R6′可表示为
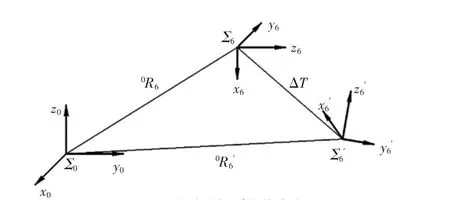
图4 末端坐标系的挠度变形Fig.4 Deflection of end coordinate system
其中[ΔpxΔpyΔpz]T为机器人末端线形变量的矢量表达式.
利用通用旋转变换[11]中的等效转角可求得坐标系Σ6′在坐标系Σ6中的旋转变换,即:

所以机器人臂杆变形在末端的映射为

根据线性叠加原理,机器人末端的总变形为

3 实例仿真分析和验证
为了验证所建刚度模型的正确性,下面通过实例仿真的方法进行分析.如图5所示的为机器人运行过程中的1条曲线,末端负载为100 N,要求运动过程中机器人的重复定位精度不小于±0.1 mm,且运动过程无明显振动.根据任务要求,现对机器人的刚度模型进行分析,分析过程如下.
首先根据任务要求,初步选定机器人的臂杆参数,建立机器人的三维模型,然后导入到Adams中进行仿真分析,得出机器人各关节所需的驱动力矩大小τi,如图6所示,根据仿真数值对机器人电机和减速器进行选型,由于本文研究的机器人是模块化的机器人,为了增加机器人末端承受负载的范围,在电机进行选型时应尽量选择电机扭矩变化范围比较大的型号,得出了电机和减速器的性能参数,然后根据式(3)和式(4)计算出电机和减速器的刚度,再根据式(5)得出各个关节的等效刚度Kθi,根据式(8)、式(9)可得到机器人的关节刚度和机器人的关节变形在机器人末端的映射Kz和Δδθ.已知机器人的末端负载,根据动力学逆解可以得到机器人各个关节的力fi与力矩ni,选择机器人的材料,确定弹性模量E和泊松比μ,根据式(10)可以得出机器人每个关节的臂杆变形Δδi,根据式(13)到式(14)可以得出机器人臂杆变形在机器人末端的映射Δδl.借助于Matlab计算软件对该过程进行编程计算,分别分析关节刚度和臂杆刚度对机器人刚度的影响,计算结果如表2所示.
图5 曲线轨迹图Fig.5 Curve trace
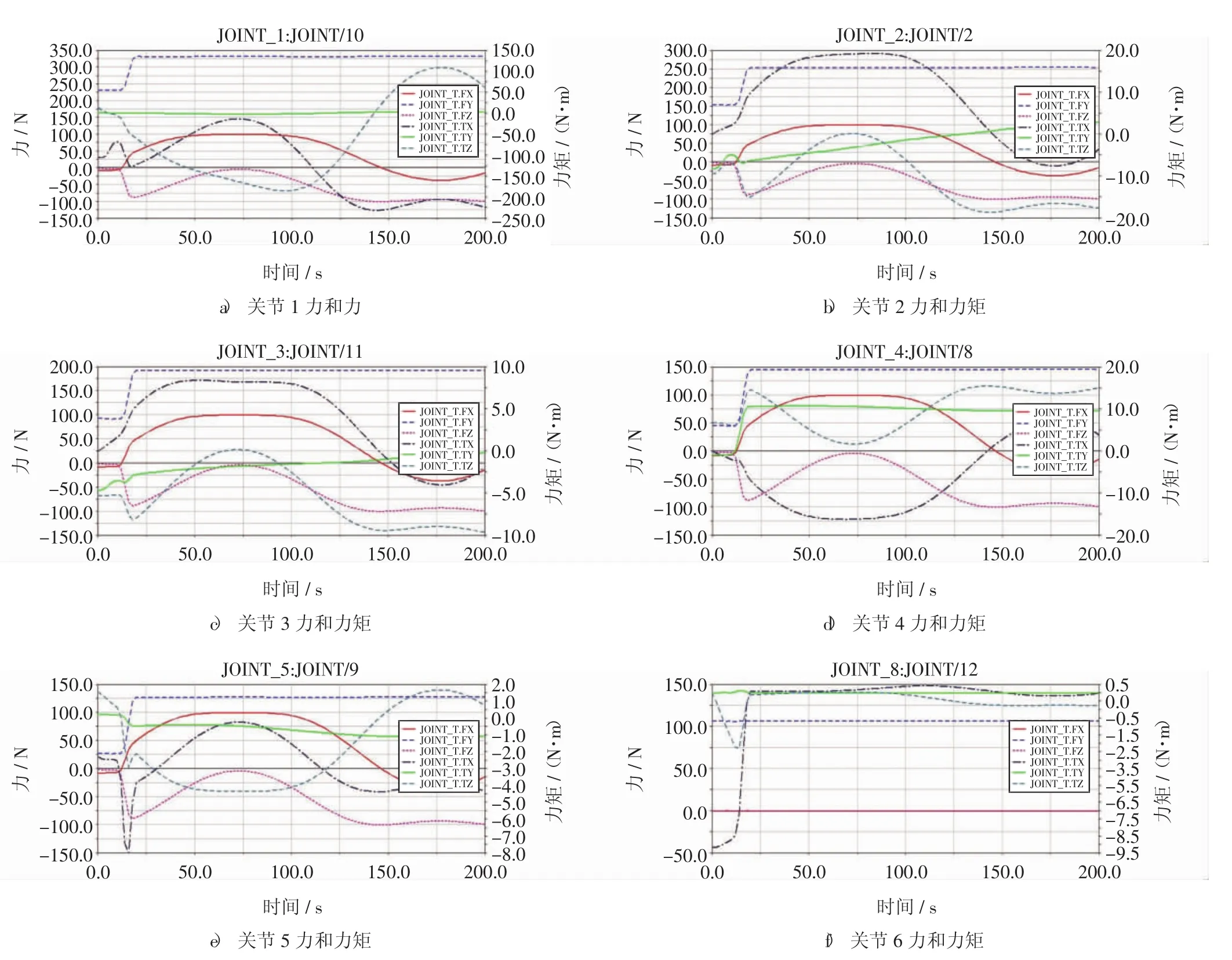
图6 各关节力矩Fig.6 Each joint torque
从分析结果看,机器人的关节变形在机器人末端的映射值要小于机器人的设计要求,所以在分析过程中为了方便对臂杆变形的分析,忽略机器人的关节变形,只考虑机器人的臂杆刚度对机器人操作精度的影响.
选定机器人材料为铝合金7075-T6,弹性模量为72 GPa,剪切模量为36.9 GPa,泊松比为0.33,屈服强度为505 MPa,密度为2 810 kg/m3.设定机器人的臂杆外径相同,取值为100 mm,臂杆内径不同,取不同的值进行验证.臂杆内径分别取95 mm,90 mm,85 mm,80 mm,建立不同参数的机器人的模型.结果如表3计算挠度所示.

表2 关节变形和臂杆变形在机器人末端的映射Tab.2 Mapping of joint deformation and bar deformation at the end of robot
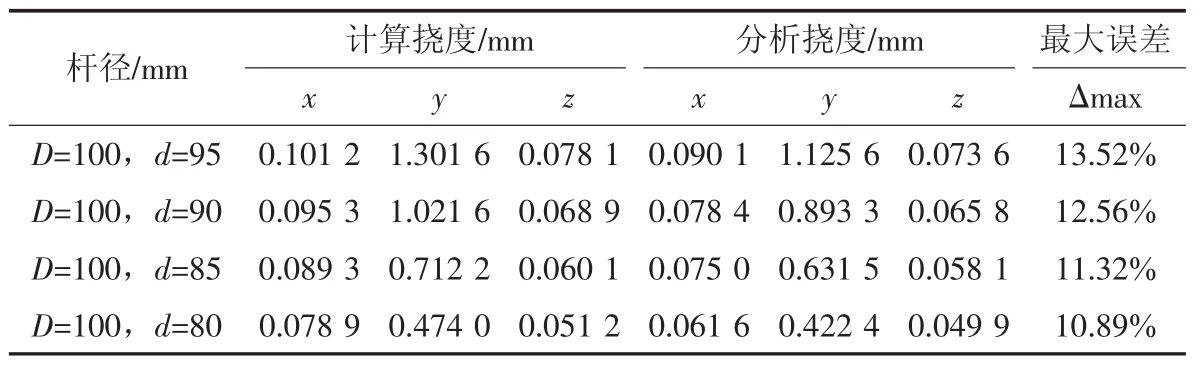
表3 水平姿态下机器人杆的末端挠度Tab.3 The end deflection of the mechanical arm in horizontal posture
将不同的机器人模型导入到有限元分析软件abaqus中,定义材料属性,添加连杆之间的相互作用和载荷,建立分析步,划分网格,进行有限元分析,由图7和图8可以看出,机器人在臂杆伸展的位姿下产生的末端变形最大,对该位姿下的末端挠度变形进行验证,在机器人末端y方向施加100 N的载荷,通过对相同外径,不同内径臂杆的机器人进行分析,得出如表2所示的数据,分析挠度为机器人在水平位姿下通过有限元分析得到的末端形变,计算挠度是通过Matlab将上述分析方法编程计算得出的机器人末端挠度,最大误差是x、y、z3个方向的计算挠度和分析挠度之差与计算挠度的比值.图9是机器人臂杆外径为100mm,内径为90 mm时的分析结果.通过表2中的数据对比可以看出分析结果与计算结果趋势基本一致,验证了刚度模型的正确性.
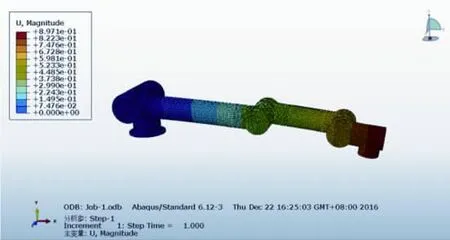
图7 水平姿态形变分析结果Fig.7 Horizontal posture deformation analysis results
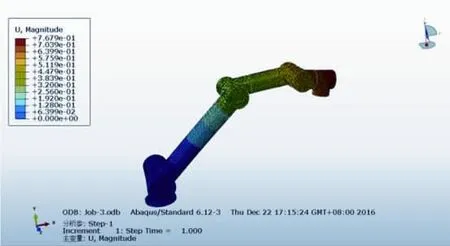
图8 一般姿态形变分析结果Fig.8 Ordinary posture deformation analysis results
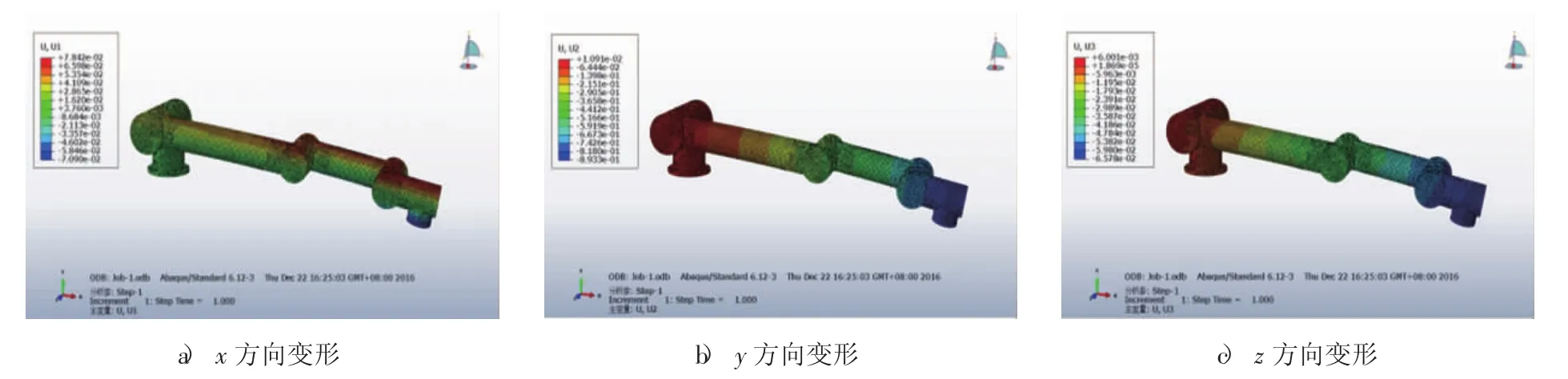
图9 x、y、z方向形变分析结果Fig.9 The deformation analysis results for xyz-directions
4 结论
通过对机器人关节变形和臂杆变形在机器人末端的挠度映射的研究,建立了机器人的关节刚度模型和臂杆刚度模型,得出了机器人臂杆的最终挠度变形,并通过Matlab软件将分析过程编程,计算出不同臂杆参数对应的机器人末端挠度大小,运用有限元分析软件和动力学仿真软件对机器人进行的静态和动态性能分析,结果验证有限元分析结果和计算结果的变化趋势基本一致,验证了静刚度模型的正确性和分析方法的有效性,为该类型的机器人提供了有效的刚度分析方法.
[1]钱灿荣.移动服务机器人机械臂结构设计及轻量化的研究[J].成都工业学院学报,2016,19(2):24-26.
[2]刘延杰,吴明月,王刚,等.硅片传输机器人手臂结构优化设计方法[J].机械工程学报,2015,51(1):1-9.
[3]罗忠,梁乐,陈燕燕,等.细长机械臂的刚度灵敏度分析与参数优化[J].东北大学学报(自然科学版),2011,32(9):1319-1323.
[4]宗光华,张慧慧.机器人终端挠度的算法[J].北京工业大学学报,1990,16(4):48-57.
[5]沈孝栋,刘长毅,张柏寿.考虑关节柔性的机器人制孔过程动力学仿真[J].机械设计与制造,2015(3):196-200.
[6]林义忠,廖小平,曾剑.6R喷涂机器人操作臂末端刚度的分析[J].广西大学学报(自然科学版),2011,36(2):234-240.
[7]张永贵,刘文洲,高金刚,等.切削加工机器人刚度模型研究[J].农业机械学报,2014,45(8):321-327.
[8]楼向明,曹家鑫,梅江平,等.高速重载码垛机器人静刚度分析[J].机械制造与自动化,2013,42(3):158-161.
[9]Joseph Sun de la Cruz,Dana Kulic,William Owen.Learning inverse dynamics for redundant manipulator control[J].Autonomous and Intelligent Systems,2010:1-6.
[10]Pashkevich A,Chablat D,Wenger P.Stiffness analysis of over constrained parallel mainpulators[J].Mechanism and Machine Theory,2009,44(5):966-982.
[11]殷际英,何广平.关节型机器人[M].北京:化学工业出版社,2003.
[责任编辑 田丰夏红梅]
On static stiffness modeling of 6R lightweight joint robot
GAO Xiaofei1,LI Chunshu1,QI Lizhe2,YAN Yao1
(1.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China;2.R&D Department,Inersmat Robotic System Co Ltd,Tianjin 301739,China)
The precision of robot operation is affected by the end deformation of the serial robot.In order to improve the absolute positioning accuracy of robot,the static stiffness model of robot joints and arms is set up,through the analysis of the end deflection of lightweight 6R joint robot.The static stiffness model of robot joints and arms is concluded by considering not only the joints deformation which mainly considering the deformations of servo motor and harmonic reducer,but also the arm deformation which includes bending,twisting and stretching deformation.Then,based on the stiffness model, the total end deformation of robot is concluded by analyzing the mapping relations between the deformation of joints and arms and the end deformation of robot.Finally,based on the stiffness model of the robot,the Matlab analysis software is used to analyze the example,and the results are compared with the results of finite element analysis.It can be used to guide the design and motion control of lightweight robots.
lightweight serial robot;static stiffness model;joint deformation;arm deformation;finite element analysis
TP24
A
1007-2373(2017)03-0029-06
10.14081/j.cnki.hgdxb.2017.03.006
2017-02-24
河北省自然科学基金(E2014202114)
高晓飞(1989-),男,硕士研究生,413179162@qq.com.通讯作者:李春书(1962-),女,教授.