小型无人机通信干扰器设计
2017-07-17杨勇张雪涛张星昱王宝珠胡洋罗松
杨勇,张雪涛,张星昱,王宝珠,胡洋,罗松
(1.河北工业大学电子信息工程学院,天津300401;2.天津七一二通信广播股份有限公司通信部,天津300462)
小型无人机通信干扰器设计
杨勇1,2,张雪涛1,张星昱1,王宝珠1,胡洋1,罗松1
(1.河北工业大学电子信息工程学院,天津300401;2.天津七一二通信广播股份有限公司通信部,天津300462)
当今小型无人机存在监管难度大、安全系数低、缺乏规范等问题.为解决无人机监管困难、执法困难的问题,本文提出了基于无线通信干扰的无人机干扰方案.针对现有干扰方案手段单一,对各种型号无人机适用性差的问题,该方案首先使用压制式无线通信干扰方式干扰无人机控制信号,使无人机丧失通信能力;其次利用GPS转发欺骗信号对无人机定位进行干扰;最终无人机在多重错误控制信号的作用下迫降或坠毁.该方案的关键步骤是对无人机通信的干扰和伪GPS信号的生成,本文基于Simulink的实验仿真结果论证了该方案具有较高的可行性.
无人机;压制干扰;GPS转发欺骗;Simulink
0 引言
随着无人机技术的急速发展,该技术开始广泛地应用于人们的日常生活.人们在享受着这一发展带来的便利与时尚,却忽略了其隐藏的一些信息安全隐患:无人机被不法分子用来进行违法犯罪活动,利用无人机进行他人隐私的侵权,无人机的不正当操作会酿成重大人为事故.因此,无人机干扰技术得到了推广,而其潜在的商业价值也在被不断地挖掘.无人机干扰技术是利用无线通信干扰技术,通过对无人机无线通信传输过程进行干扰,从而使无人机通信中断来达到干扰目的.在电子对抗领域,这是一个重要的研究方向.而现有的无人机干扰系统干扰手段单一,实际效果因为系统设计不合理而大打折扣.故本课题着眼与当前民用小型无人机干扰技术的研究,结合无线电通信干扰技术和GPS干扰技术,推出一套小型干扰器,旨在规范无人机的规范使用,利用较为综合的干扰技术来减少其所带来侵权事件的发生,给小型无人机一片规范而且有秩序的空间[1-4].
本文通过了解无人机干扰技术的研究背景、应用现状及发展方向,提出了基于无线通信干扰的无人机干扰器设计.设计方案首先针对无人机的通信链路进行干扰,使其失去与地面的联系,随机对其GPS辅助定位系统进行干扰,最终迫使无人机无法正常工作[5].该技术的关键步骤是对无人机通信的干扰和伪GPS信号的生成.本文采用压制式干扰中的扫频干扰,能够最大限度的减小对周围正常信号的影响.Simulink仿真结果表明该设计方案合理可行.
1 无人机干扰技术原理概述
1.1 WiFi通信技术干扰
WiFi通信干扰机通常由终端、调制器、信号接收机、干扰信号发射机、控制系统等组成,其工作原理为:首先当信号接收机探测到入侵信号时,终端对其进行记录分析,并给出入侵信号的工作频率等相关参数;其次利用控制器对调制器的命令选配出最佳干扰方式,利用发射机的高频振荡信号在合适的频率点进行调制;最后用发射天线将能量对准被干扰对象辐射出去.本文采用的是压制式干扰技术,通常根据信号的频谱特点分为瞄准式、阻塞式、半瞄准式、跟踪转发式、单/多频以及扫频式等.而干扰信号的形成则使用噪声调制方式以及随机二元码进行生成.
采用噪声调制的方式,这种方式产生的干扰噪声即为干扰信号.干扰信号对被干扰对象的干扰效果与两个方面相关,其一是发射机发射的干扰信号的质量,其二是进入目标机的干扰信号的功率大小.通常使用的干扰信号是利用噪声对振荡器的载频实施调制而成的,其方法也分为噪声调频、噪声调幅和噪声调相,本文主要分析前两种方法,即噪声调频和噪声调幅.
噪声调频干扰信号的产生模型如图1所示.噪声源首先通过滤波器,以控制噪声信号的带宽,随后经过积分和相位调制,便可获得噪声调频干扰信号,其中Kfw为由实验确定的比例因子.噪声调频信号具有以下特点:干扰信号功率谱密度分布表现出高斯分布,干扰信号强度与载波强度相同,与调频之前的噪声强度没有关系,噪声功率和调频指数决定了噪声调频干扰信号的等效带宽.
噪声调幅干扰信号的产生模型如图2所示.经滤波器的处理,初始信号将会变成带限噪声,在加上一定的基准电压之后,最终通过载波实施调制得到最终的噪声调幅信号.
调制结果如图3所示,其中,图3a)表示噪声信号功率谱密度,图3b)表示噪声调幅信号功率密谱,参数ΔF表示噪声信号的频带宽度;f0表示载波频率;表示载波经过调制后,其幅度将会下降到原来的一半.发射使用的干扰信号是噪声源信号经过调幅调制获得.调制后的功率谱和调制之前的功率谱较为相似;次功率谱中央经过调幅,已经搬移到载波频率中心频率w0处;宽度比初始频谱扩大一倍.且经过调制,干扰信号的功率包括原噪声信号功率和载波信号功率.
1.2 GPS转发式欺骗干扰
1.2.1 GPS转发式欺骗干扰的优势
由于GPS信号十分微弱,很多用于电子对抗和民用GPS干扰设备也开始因其低廉的成本而大量投入使用.对GPS通信进行干扰,主要是针对手持终端的干扰,同样属于无线干扰,从技术层面上来说大致可以有以下几种方法来实现GPS干扰.

图3 功率谱图Fig.3 Power spectrum
1)压制式干扰:分别为瞄准式、阻塞式和相关干扰.
2)欺骗式干扰:分别为转发式和再生式.
关于无人机GPS信号干扰的实现,顾及到再生式欺骗技术需要生成与GPS卫星信号一致的伪信号,然则产生的伪信号工作量巨大,而且平常所见的处理器很难在短时间完成运算,产生的伪信号质量没有接收的卫星信号好,故采用转发式欺骗干扰[6].
1.2.2 GPS转发式欺骗干扰
GPS转发式欺骗干扰如图4模型所示:接收单元在正常工作时,应接收卫星发来的GPS信号;如果同时干扰机开始工作,将经过延时放大后的信号进行发射,则无人机接收到的将是干扰机发出的信号.因为原始卫星信号极弱,且经放大延时处理之后的GPS信号强度较大,同时由于GPS转发式欺骗干扰仅仅利用了GPS信号的自然延迟,故干扰机辐射的信号能够被接收单元获取并处理,最终导致无人机解析得到错误的导航报文.最终完成对其GPS辅助定位系统的干扰[7].

图4 GPS转发干扰模型Fig.4 GPS repeater interference model
2 设计方案
2.1 总体设计方案
本文主要介绍小型无人机干扰器的设计,采用了独立分步干扰的方案.如图5所示,系统分为两个独立模块:通信干扰模块和GPS转发欺骗模块.系统利用无线通信干扰手段,首先进行入侵信号的判定,对已经判定为入侵信号的可疑信号实施通信干扰,切断无人机与控制者的通信.当成功实施干扰之后,实施GPS转发欺骗干扰.
系统结构模型如图6所示.方案设计思路源于无线通线干扰,分为压制式和转发式.首先无线通信干扰模块选择压制式干扰,因为该种干扰方法可以较为容易的产生噪声信号;其次使用相对简单的噪声调制技术来产生功率相当的噪声干扰信号.一旦启动干扰装置,系统将开始向外发射干扰信号.通过分析和对比发现,扫频式干扰的干扰信号可以更好的将干扰信号的能量集中发射到无人机通信信号所在传输通道,故本方案选择扫频式干扰方式.无人机因为接收到的信号信噪比过低,几乎无法解析出有用信息,从而导致无人机通信失败.而GPS转发欺骗,由于其转发的GPS信号只是利用了信号的自然延时的反应时间进行处理,所以实时GPS信号和转发GPS信号只是在时间上有延迟,而在频域上两者仍具有相同的频谱特性.
图6所示系统模型中,首先信号干扰器(Jammer)发出干扰信号,无人机(UAV)控制信号被干扰和屏蔽;GPS信号发射器(GPS transmitter)释放经过处理的异地GPS信号.由于GPS卫星(Satellite)离地面太远,发射的GPS信号经过长距离的传输已经变得十分微弱,而经过放大处理后的GPS信号此时比实时GPS信号强很多,且无人机自身没有智能判断真伪GPS信号的功能,所以只能接受信号更强的伪GPS信号.之后无人机会通过不断矫正自身位置来调整GPS定位或者是悬停在空中,待其续航能力接近极值时,便会原地迫降或直接坠毁,达到干扰无人机的系统功能.
2.2 系统软件设计
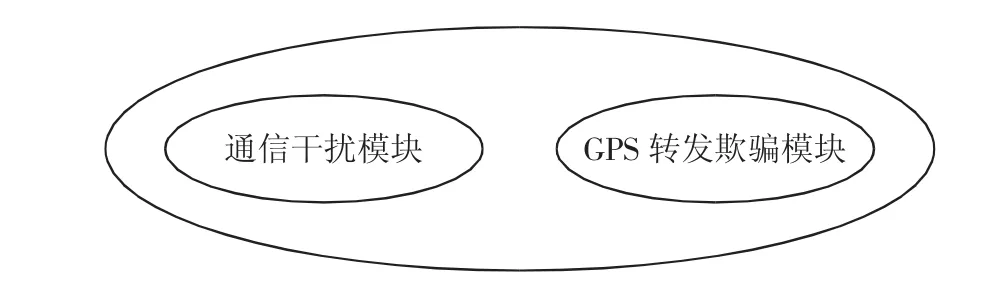
图5 小型无人机通信干扰系统Fig.5 The communication interference system of SUV

图6 小型无人机干扰系统模型Fig.6 The interference system model of SUV
整体系统软件设计包含STM32单片机主模块和通信模块程序设计.主模块主要包括STM32复位电路、时钟电路、程序下载电路与接口电路、DAC正弦信号产生电路、电源管理电路程序设计.通信模块主要包括WiFi-ESP8266模块、NRF24L01无线模块、GPS模块电路的程序设计.
2.2.1 系统单片机主程序设计
系统单片机主程序设计流程图如图7所示:系统开启后进行初始化工作;当单片机主模块进入工作状态后,处理器向WiFi模块发出信号扫描的控制指令,如果能扫描到某个信号且其信号强度变化呈递增状态,则判定此信号为可疑信号,跟踪程序开始跟踪此信号;由此触发入侵信号判定程序,当扫描到此信号的强度大于规定的极限值时,则判定此信号为入侵信号;系统报警程序启动,警示灯闪烁,并由此启动干扰发射装置;干扰器利用扫频干扰的方式发射一定功率的噪声,将无人机控制信号淹没在噪声信号之中,使其失去控制.在干扰器发射干扰信号一定时间后,触发GPS转发式程序进行转发欺骗干扰.
2.2.2 通信模块设计
通信模块程序流程图如图8所示:系统启动并进入待机状态,通信模块一直处于等待状态,WiFi模块不断在扫描信号;如果有信号则触发跟踪程序中断,跟踪扫描到的可疑信号;当跟踪的信号强度高于所设值,则触发判定程序中断,判定此信号为入侵信号;当两个中断都被触发之后,则开始进行干扰信号的发射.干扰信号的发射则会触发GPS转发程序,此时转发系统会将处理好的或者是异地录制的GPS信号发射出去,使无人机的GPS信号接收器接收到错误的GPS定位信号;接着间隔性发射转发的GPS信号,则会使无人机处于不断地位置调整过程;在长时间的错误定位情况下,无人机能量耗尽,最终迫降或者坠毁[8].
3 仿真及结果分析
对于小型无人机干扰器系统的验证主要集中在软件仿真模拟层面.本文采用Matlab的Simulink组件,该组件具有操作简单灵活、功能丰富贴近实际等优点,仅需要创建并连接不同的功能模块就可以完成复杂系统的模拟和仿真,并且参数易于调整,很好的满足了本文所设计系统的仿真模拟要求.
3.1 WiFi信号干扰的仿真及结果分析
本文采用单/多频相加的方式产生噪声信号,对WiFi通信进行干扰,即多个频段信号叠加来形成干扰信号.由于单个频段的干扰针对性较强,但是对于跳频信号的干扰效果较差,使用S/D干扰可以很有效的解决这个问题(如图9所示).模拟中使用的Simulink模块有正弦波发生器、相加器、频谱示波器等组件.正弦波参数选择如表1所示,框图如图10所示.

图7 STM32单片机主程序设计流程图Fig.7 The main program design flow chart of STM32

图8 通信模块程序流程图Fig.8 The program flow chart of communication module

图9 S/D多频干扰频谱图Fig.9 S/D multi frequency interference spectrum
3.2 GPS转发式欺骗干扰的模拟与仿真
由于转发式欺骗干扰无需对码内部结构进行分析,在仿真的过程中为了验证干扰器对信号的干扰作用,只需要对信号的接收、时延、转发进行模拟仿真.故采用普通随机信号作为模拟的GPS信号输入系统.系统总体框图如图11所示.
经过零阶保持器进行插值处理、幅度调整、数值取整等处理后,获得模拟GPS信号.考虑运算时间和获得足够明显频谱特性需要的数据量,经过处理后的随机信号需输入合理大小的缓存.经过FFT运算,可以利用频谱示波器进行观察.随后进行延时转发处理.利用Integer to Bit Converter模块进行模拟信号到数字信号的转换,同时将二进制数据封装成帧送入缓存(缓存用于匹配数据接收,延时运算,发射之间的速率差异).缓存中的数字信号经过延时模块进行时延处理,输入缓存以备发射.由于处理完成信号与源信号应同为模拟信号,系统末级应加入数模转换模块,最后进行发射[9].

表1 正弦波的参数选择Tab.1 Parameter selection of sine wave

图10 WiFi信号干扰模块Simulink框图Fig.10 The simulink block diagram of WiFi signal interference module
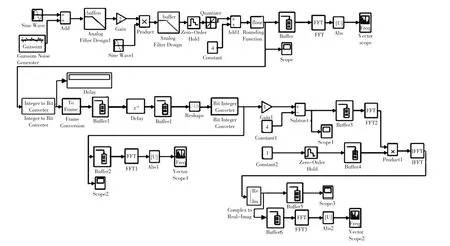
图11 系统总体框图Fig.11 System overall block diagram
如图12所示,通过对时延转发前后的模拟信号波形和频谱进行对比,可以发现进行时延处理的信号其频谱结构并不会受到影响,仅时间上滞后.验证了GPS信号转发的可行性.
转发前的频谱如图12a)所示,转发后频谱如图12b)所示,通过对比可以发现,转发前后信号频谱并未发生明显改变,即信号所携带的信息并没有发生改变.转发前波形如图12c)所示,转发后波形如图12d)所示,通过对比可以发现,波形并未发生明显改变,只是在时间上有延迟.上述现象归根结底是由于信号的自然延时并不会改变信号所决定的.
3.3 硬件设计与仿真

图12 信号转发前后频谱与波形图对比Fig.12 Comparison of spectrum and waveform before and after signal forwarding
硬件设计采用STM32开发板,利用J-Link下载器进行程序的下载,对于实际系统则使用最小可裁剪的嵌入式系统-UCOSII实时系统.在实际电路中仅让芯片通过内部晶振产生一个DAC正弦信号来代替干扰信号,并通过NRF24L01模块进行发送,完成对无人机通信的干扰;GPS信号接收机采用的芯片是GPSNEO-6M芯片,而转发器则用WiFi芯片将无线信号发射出去.在实际硬件电路中采用GPS接收机和发射机的水平距离为8 m,基本满足GPS转发干扰所需的最小距离[10].
4 结束语
本文主要针对现行主流小型无人机的控制技术,提出了对GPS和WiFi控制信号控制链路进行有针对性的干扰方案,并且对方案的可行性进行了论证及仿真模拟.实验证明本文提出的干扰方案有效且易于实施;多频率叠加的干扰方式可以有效的干扰通信链路;GPS转发式干扰方式不会改变原有GPS信号的频谱结构,可以达到欺骗效果.本文提出的干扰方案结构清晰,可实施性较高,给无人机干扰器的设计提供了有益的思路和方向.
[1]杨继庚,董文锋.对预警机雷达的分布式组网干扰[J].电子信息对抗技术,2015,30(6):27-32.
[2]莫骏超.国外无人侦察机研究现状及关键技术[J].飞航导弹,2016,46(9):46-52.
[3]潘兴宏,秦志强.反无人机系统浅析[J].科学中国人,2016,24(5):39.
[4]吴健辉,李朝辉,李孝春,杨敏.基于STM32单片机的双相信号发生器设计[J].自动化与仪器仪表,2015,35(11):183-185.
[5]黄桂,纪元法,孙希延.基于GPS导航系统的伪卫星信号发射器设计[J].无线电工程,2016,46(3):68-70.
[6]刘天庆.GPS转发欺骗式干扰时延控制算法研究[J].现代导航,2016,7(3):166-169.
[7]张宁.GPS转发欺骗式干扰应用于无人机的实例分析[J].中国航天,2015,24(7):40-42.
[8]吴敏.论述GPS与发射机的关系[J].科技传播,2016,8(2):54,59.
[9]张志成.基于STM32单片机的函数信号发生器[J].自动化与仪器仪表,2014,34(2):70-71,74.
[10]周江.STM32单片机原理及硬件电路设计研究[J].数字技术与应用,2015,33(11):1.
[责任编辑 代俊秋]
A design of communication jamming device for small UAV
YANG Yong1,2,ZHANG Xuetao1,ZHANG Xingyu1,WANG Baozhu1,HU Yang1,LUO Song1
(1.School of Electronic and Information Engineering,Hebei University of Technology,Tianjin 300401,China;2.Ministry of Communications,Tianjin 712 Communications Radio Limited by Share Ltd,Tianjin 300462,China)
At present,the security problem of UAV is getting worse due to great difficulty in monitoring,low safety factor, lack of norms and other issues.In order to deal with the difficulty in monitoring,a small UAV interference program which based on the principle of wireless communication is proposed.The means of existing schemes are poor.To solve this problem,firstly the program uses the barrage jamming method for radio communication to make the UAV lose the ability to communicate.Then use the GPS repeater deception signal to interfere the UAV positioning.Finally the UAV makes a forced landing or crashed in the role of multiple error control signals.The key step of the technique is to generate the interference and pseudo GPS signal of the UAV communication.The experimental simulation results based on Simulink shows that the program is highly feasible.
UAV;barrage jamming method;GPS repeater deception;Simulink
V279
A
1007-2373(2017)03-0023-06
10.14081/j.cnki.hgdxb.2017.03.005
2016-12-14
天津市科委基金(16JCTPJC50200)
杨勇(1982-),男,高级工程师.通讯作者:王宝珠(1962-),女,教授,wbz8989@hebut.edu.cn