实验室涂装机器人底座的改进
2016-11-09刘传辉袁洪印王霞玲
刘传辉++袁洪印++王霞玲
摘 要:实验室喷涂机器人是研发汽车涂料的主要设备之一,本文根据实验室现有二维汽车涂装机器人的性能,确定了改进的三维汽车涂装机器人。利用CATIA软件对涂装机器人的运动机构进行三维建模。对伺服电机和执行机构进行了分析和选择。对改进设计的喷涂机器人进行组装测试,对改进前后和进口国外的喷涂机器人的实验性能进行比较。得出改进涂装机器人达到实用要求的结论。
关键词:实验室;涂装;机器人;底座;改进
中图分类号:TP242 文献标识码:A DOI:10.11974/nyyjs.20160832073
引言
汽车涂料是影响汽车涂层的主要因素之一,由于生产汽车涂料时所使用的原材料批次有所不同,所以每次生产涂料的原材料配方有所不同,特别是在颜色、外观等方面[1-3]。为了生产出高质量的涂料,涂料研发中心做了大量实验,模拟汽车生产线喷涂,然而由于喷涂机器人比较古老自身存在缺陷,无法自动调节喷涂距离(板距),只能把涂料喷在较薄的平板上,这就导致误差的存在,从而导致实验室合格的涂料到汽车生产线使用时还需要调试。
由于现在可自动调节喷涂距离的机器人价格比较昂贵,一般企业难以接受。为配合汽车涂装生产线,喷涂更加稳定准确,实现现有3自由度喷涂机器人的功能,节约成本。本文针对实验室,改进设计了一种专门用于实验室涂料研发的喷涂机器人。
1 喷涂机器人改进设计及控制
1.1 传动部件选择
喷涂机器人机械运动机构包括底座上的X轴、Y轴和带动枪托的Z轴。为了更加稳定的喷涂,达到现有3自由度喷涂机器人的功能,运动机构采用较高精度的专用的轴承,以达到运动平稳、使用寿命长、噪音小等特点[4-5]。喷涂机器人驱动方式主要包括:伺服电机驱动,滚珠丝杠等主要驱动部件[6-8]。通过理论计算选出滚珠丝杠和伺服电机(表1和表2)。
1.2 轴承的选择
综合比较,滚珠丝杠应选择高精度、加速性能好、维修方便的轴承,所以滚珠丝杠前端选着高精度、启动阻力低的角接触球轴承;后端要求承受较小的载荷,可以补偿热变形伸长,所以采用深沟球轴承,中间主要是支承作用,防止丝杠由于太长高速运动时太热产生弯曲变形,所以采用当量摩擦系数最小,具有一定承载能力的深沟球轴承。
1.3 导向部件的选择
滚动直线导轨是一种精密的导向部件,它具有承载高、精度高、运行速度高、摩擦力小、可靠性高等特点,现如今已经被大多数机械、自动化生产线领域所应用。为了增加滚珠丝杠的使用寿命,稳定的喷涂,提高喷涂质量,所以,选着导向支承的部件——直线圆柱导轨。滚动直线导轨是由LM光轴、钢球、轴承套、保持器、密封垫片等组成。通过计算选择的直线圆柱导轨(如表2)。
1.4 底座的结构
喷涂机器人的喷涂效果和底座的结构有一定关系,底座结构比较简单、刚性好、便于安装和维护、容易安装限位开关和传感器等。底座包括X轴运动和Y轴运动(如图1和图2)。大导程滚珠丝杠和直线导轨的结合可以减小摩擦力、精度稳定性高。底座由工作台、滚珠丝杠、直线轨道、Y轴支架、连接X、Y轴的支架等组成,配合伺服电机X轴最大运行速度可以达到1m/s。
1.5 底座的控制
喷涂机器人控制系统结构主要包括:喷涂系统、PC电脑、数控系统、电气控制柜等,软件包括数控系统参数的修改、PLC程序编制等[9-11]。喷涂机器人的主要运动机构(X、Y轴)由数控系统和执行机构完成,其他辅助由数控系统的PLC完成。为了防止运动机构运行超程,在X、Y 2轴2端安装了限位开关,当3轴碰到限位开关时,系统会报警提示工作人员。
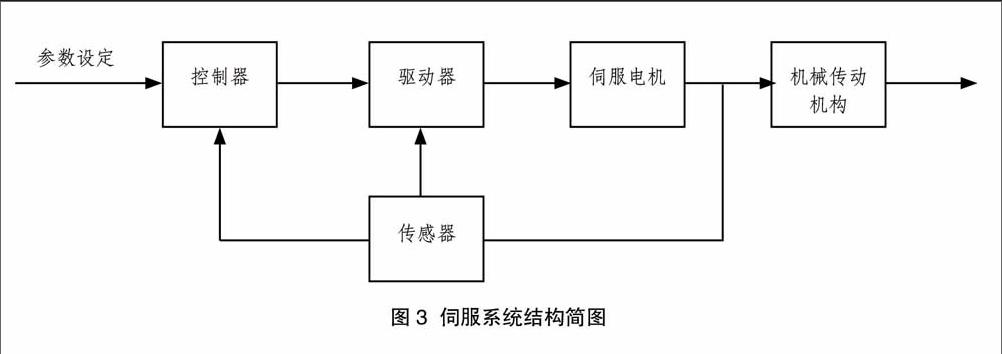
喷涂机器人运动机构需要满足3个主轴滚珠丝杠可以同步运动、X轴滚珠丝杠可以按照需要更改运动的速度、Y轴按照工件的厚度调整位置保证工件喷涂面与喷枪或者旋杯之间的距离为25cm,Z轴运行到喷涂起点位置准备喷涂。喷涂机器人有X、Y、2个进给坐标,其中X、Y 2个坐标在底座上,为工件运动。喷涂机器人运动机构主要由丝杠和直线圆柱轨道组成的机械部分(如图3)。
2 喷涂机器人试验研究与分析
汽车涂料的颜色、橘皮、性能等是涂料研发公司进行研究的主要指标,本实验以保险杠涂料作为实验涂料,板材为提供的大小马口铁PP性能板和PP颜色板。实验结果结合了理论与实际进行分析。实验的条件、实验设备和检测设备的特点都会影响实验的结果,本实验是在大型涂料研发公司进行的,采用先进的设备进行检查,喷涂工艺完全一样,并且与汽车涂装生产线相结合,这样使得论文的研究具有更大的意义。
2.1 实验材料
小马口铁和大马口铁各16块,不同厚度的板材(1~5cm),每种厚度板材15块共75块,1k浅灰导电底,金属漆(土豪金)和白实色,2k保险杠清漆,异丙醇,粘性擦布。
2.2 测量仪器
自动程序膜厚仪
2.3 实验步骤
用异丙醇将试验板材擦洗干净。
用喷涂机器人分别把1cm的板材, 喷好1k浅灰导电底。
闪8min,按照相对应的程序分别将色漆喷好(原漆粘度DIN杯17s/23℃,施工粘度Ford4杯17s/23℃)。
闪8min,按照2k保险杠清漆程序清漆喷好(粘度DIN杯23s/23℃)。
平10min,分别放进3个完全一样的烘箱的同一个位置,烘烤温度85℃,烘烤时间20min烘烤。
取出试板,带冷却后进行膜厚测量。
分别将同厚度的板材用机器人按照以上步骤流程完成,在进行下一厚度板材,进行比较。
2.4 实验结果
喷涂机器人主要是针对实验室研发涂料所应用,不适合在汽车生产线上应用,具有以下特点:
滚珠丝杠和直线导轨的增加使得喷涂机器人运行更加平稳、精度更高,喷涂膜厚更加均匀。
可以实现背板的半自动调节,范围是250~600mm,同时能实现多厚度工件的喷涂,工件厚度可以达到300mm。如此一来,原来由于厚度较大而不能直接喷漆的工件,在该设备下便可以通过调整继续进行喷涂研究,从而可以根据客户需求研发涂料,进而为研发商带来更多的效益。
喷枪(或者旋杯)扇面的重叠更加均匀。
3 总结
本文经过了详细精准的计算与选择喷涂机器人的运动部件、运用CATIAV5R20软件进行三维建模,对实验室喷涂机器人的运动部分进行了研究,主要结论如下:
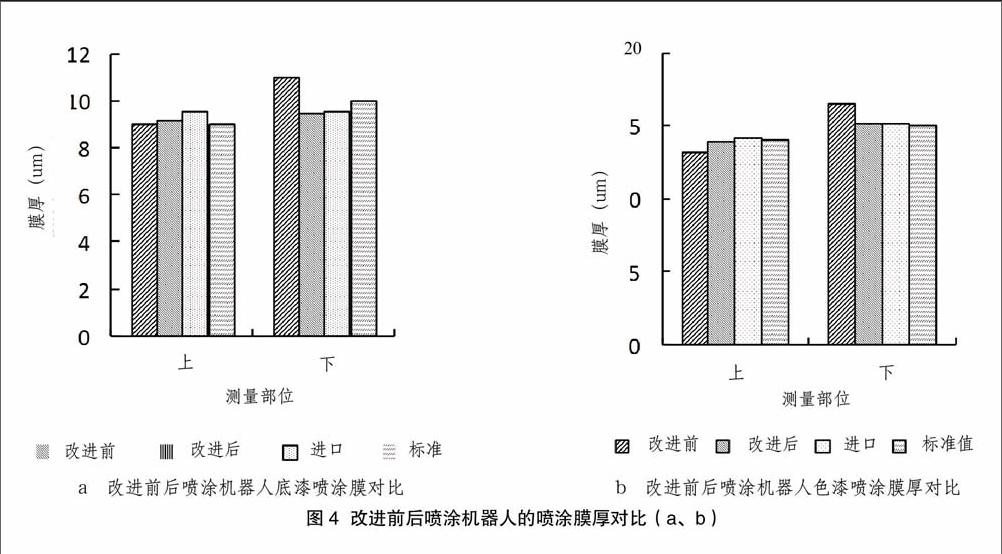
对于可以忽略厚度的喷涂工件,改进前喷涂机器人喷出的膜厚波动比较大,其膜厚偏离标准值;进口喷涂机器人喷出的膜厚偏离比较小,膜厚值在标准范围内;而改进后的喷涂机器人虽然膜厚有波动,但是波动比较小,整体膜厚可以满足标准范围。
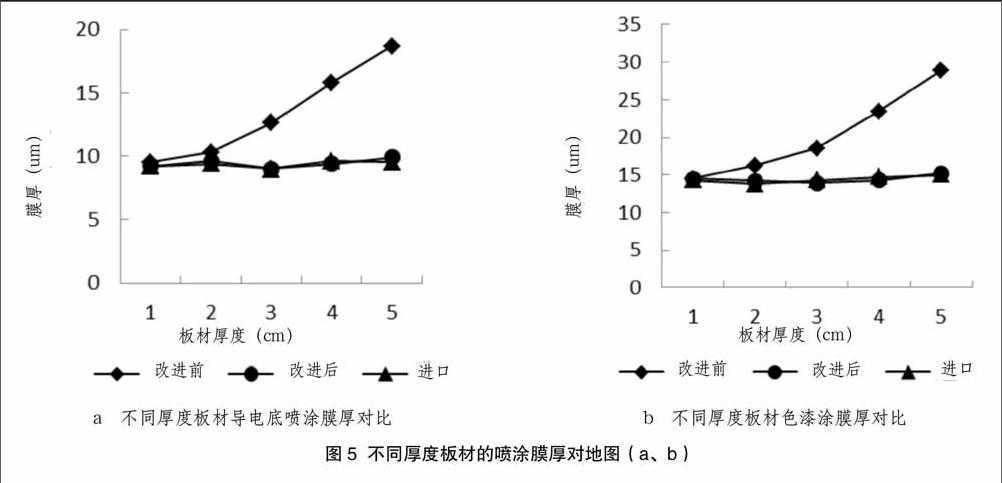
对于厚度不可忽略的喷涂工件,随着板材厚度的增加改进前的喷涂机器人漆膜随着增加,并且随着漆膜厚度的增加,增加浮动越来越大;而改进后可以调节喷涂距离的喷涂机器人,所以喷出的漆膜复合标准范围,但是跟进口机器人有轻微的差别。
通过实验对比,在相同工艺下,使用改进前后和进口的喷涂机器人进行喷涂比较,无论是薄喷涂工件还是厚喷涂工件,改进前的喷涂机器人所喷涂出的膜厚远偏离标准范围,改进后的喷涂机器人更接近进口国外现使用的喷涂机器人所喷出的膜厚,其膜厚可以达到标准范围。而在相同的涂料工艺下,膜厚决定涂料的颜色与性能的质量。所以改进后的喷涂机器人,可以达到生产需要。
参考文献
[1]林鸣玉,汽车涂装技术[M].北京:北京理工大学出版社,1998.
[2]王锡春,汽车涂装工艺技术[M].北京:化学工业出版社,2005.
[3]王锡春,涂装车间设计手册[M].北京:化学工业出版社,2008.
[4]李亚林,喷涂机器人在汽车车身涂装的应用与质量控制研究[D].湖南:湖南大学,2012.
[5]余汉斌,汽车涂装工艺的发展[J].汽车工艺与材料,2006(l):258.
[6] Sun-min Kim,SunkyuLee.Prediction of thermo-elastic behavior in a spindle bearing stem considering bearing surrounding[J].International Journal of Machine Tools Manu-cture,2002,1(41):809-831.
[7]张伯霖.高速切削技术及应用[M].北京:机械工业出版社,2003.
[8]赵月娥.五轴联动高速主轴铣头的设计和运动仿真[J].陕西科技大学学报,2009(27):77-79.
[9]王永强.滚珠丝杠进给系统自适应建模理论与方法研究[D].山东大学,2013.
[10]廖常初.PLC编程及应用[M].机械工业出版社,2002.
[11]濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2006.
[12]徐益.机器人控制系统设计[D].浙江大学,2003.
