参数自整定的模糊PID控制器及其改进
2016-09-22陈永建
刘 冰,陈永建,周 艳
(1.上海大学 机电与自动化学院,上海 200444;2.肇庆学院 电子信息与机电工程学院,广东 肇庆 526061)
参数自整定的模糊PID控制器及其改进
刘冰1,陈永建2,周艳2
(1.上海大学 机电与自动化学院,上海200444;2.肇庆学院 电子信息与机电工程学院,广东 肇庆526061)
PID控制是工程上最为简单实用的一种控制方式,但PID参数整定难度较大,过程繁琐,难以找到最佳参数.模糊控制是一种利用人类专家控制经验的智能控制,模糊PID控制相对于常规的PID控制,具有参数整定方便、鲁棒性好、控制性能高的优势,但控制结构和算法较为复杂.综合PID控制和模糊PID控制的特点,设计了一种改进的混合结构的模糊PID控制器,并以实例仿真说明该控制器的有效性.
模糊PID控制器;自整定;PID控制器;MATLAB;Simulink
0 引言
模糊控制是一种先进的智能控制,它不依靠精确的系统模型,将模糊逻辑理论应用于工业控制领域,特别是对非线性、复杂对象的控制显示出了鲁棒性好、控制性能高的优点[1].然而实际应用中发现,采用单一的模糊控制器进行系统控制时,往往无法达到系统要求的所有控制指标,这样就需要结合其他控制器进行补充.而PID控制器由于具有开发早、结构简单、通用性强、鲁棒性好等优点,使得它在工业过程控制领域得到了广泛应用与发展,模糊PID控制器也由此应运而生.常规的模糊PID控制器由模糊控制器和常规PID控制器串联组成,模糊控制器以信号的偏差e和偏差导数e˙作为输入量,通过模糊推理输出比例、积分、微分系数KP,KI,KD,进而输入到常规PID控制器,通过PID控制算法得到整个模糊PID控制器的输出量.模糊PID控制器利用模糊推理大大简化了PID参数的整定问题,PID控制也改善了模糊控制的控制性能;但其控制结构与算法比PID控制要复杂得多,并且模糊控制器的输入量一增加会加大模糊控制器设计和计算的复杂性.本文中,笔者设计了PID控制器与模糊PID控制器相结合的混合结构,当偏差||e˙≤ξ时,采用模糊PID控制;反之,则采用常规PID控制.该控制方法既能充分利用模糊PID控制鲁棒性强、参数整定方便等优势,又能在一定程度上避免因输入量增加而引起的模糊推理结构复杂、计算量过大的问题.
1 参数自整定的模糊PID控制器设计
1.1PID控制器
基本的PID控制规律为

其中:KP为比例系数;KI为积分系数;KD为微分系数.
由控制规律可知,PID控制器只需设置KP,KI,KD3个参数,使用方便,原理简单.PID参数的整定一般采用凑试法来确定,根据控制对象的不同特点,结合系统性能指标,通过闭环试验,反复凑试,最终得到最佳的PID参数.此外,也可以利用一定的工程整定方法,如Ziegler-Nichols整定法、临界比例度法、衰减曲线法,按照工程经验公式对PID参数进行整定;还可以在MATLAB/Simulink环境下进行计算机仿真,更为快捷地找到最佳PID参数.PID控制器参数的整定是一个需要反复调整测试的过程,若系统的动态特性发生变化,则PID参数又需要重新整定,反复测试调整,其过程非常繁琐;另一方面,PID控制器对非线性、时变、耦合及参数与结构不确定的复杂过程难以控制,这是其存在的不足.
1.2参数自整定的模糊PID控制器
自从模糊逻辑应用于蒸汽机的控制后,模糊控制在工业工程控制、机器人、交通运输等方面得到了广泛应用.参数整定一直都是PID控制的核心,模糊控制能很好地解决这一问题.参数自整定的模糊PID控制器是具有PID功能的参数自整定的模糊控制器,它的基本结构如图1所示.
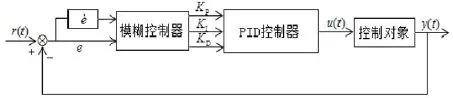
图1 参数自整定的模糊PID控制器结构图
模糊PID控制器以偏差e和偏差导数e˙为输入,经过模糊推理得到KP,KI和KD3个参数,将其输入到常规PID控制器中可得控制器的控制量u.上述控制器是一个两输入、三输出的模糊控制器.偏差e、偏差变化率e˙及PID参数KP,KI,KD的模糊集均为{NB,NM,NS,ZO,PS,PM,PB},分别表示相应参数“负大”、“负中”、“负小”、“零”、“正小”、“正中”、“正大”.论域均为{-3,-2,-1,0,1,2,3}.同时,NB与PB的隶属函数选择Sigmoid型,其他均采用三角形隶属度函数.
模糊控制器的核心是模糊控制规则的建立,需通过模糊推理、模糊关系的合成等一系列运算,最终得到输出量,因此模糊控制规则的选取对模糊控制器性能的影响至关重要[2]124.建立模糊控制规则的方法一般有经验归纳法、合成推理法等.考虑到PID控制器的特点,笔者采用经验归纳法建立控制规则.
现将PID控制器参数对控制过程的影响[3]总结如下:
1)比例作用KP可以减小余差,改善控制精度,加快调节速度;但它不能消除余差,并且KP的增大将加剧系统振荡,造成系统的不稳定.
2)积分作用主要是消除余差,但积分作用大将会使得系统振荡,稳定性变差.
3)微分作用可以改善动态性能,加快系统的动态响应,减少超调量和调节时间;但微分作用过大会使系统出现不稳定,并且易受干扰影响.
PID参数对于控制性能的影响[4]如表1所示.
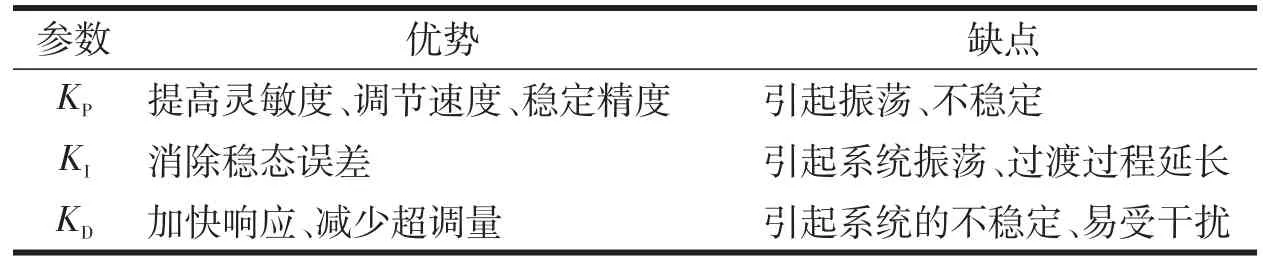
表1 PID参数对控制性能的影响
由此可见,在确定PID参数的模糊控制规则时,应综合考虑控制对象的特性、被控制参数的性质、扰动以及控制系统性能指标等各方面因素,反复检验,以期得到最佳的控制规则.
根据以上PID参数对控制过程的影响,并结合控制系统的性能指标要求,将模糊控制规则设计如下[5-6]:
1)当e过大时,取较大的KP和较小的KD,以减少稳态误差,加快系统的响应速度;
2)当e和e˙都处于中等时,取较小的KP以增强系统的稳定性,KI和KD取值要适当,既要能消除稳定误差,又要能减少超调量,不引起系统的振荡;
3)当e较小时,为消除稳态误差应取较大的KP和KI,而KD取值要适当,以免使系统产生振荡、不稳定的现象.
KP的控制规则表如表2所示.
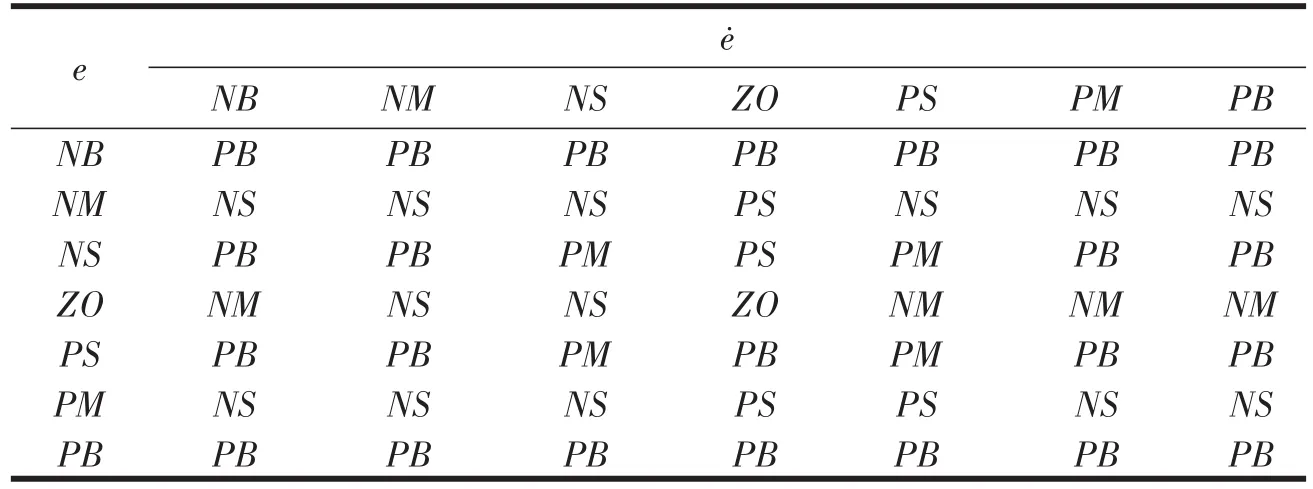
表2 KP的控制规则表
为了直观形象地观察仿真结果,笔者利用MATLAB的模糊逻辑工具箱与Simulink的无缝连接功能,先在模糊逻辑工具箱中建立模糊推理系统,然后利用Simulink的仿真环境进行仿真分析.这里取被控对象的传递函数为,仿真结果如图2所示.
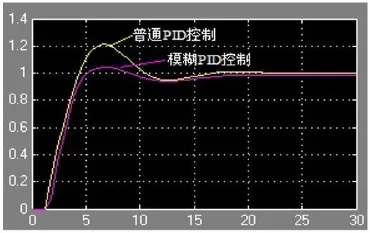
图2 参数自整定的模糊PID控制器的仿真曲线图
2 混合结构的参数自整定模糊PID控制器
以上讨论的模糊控制以偏差e和偏差变化率e˙为输入量,本质上相当于一种非线性PD控制[2]124.为消除稳态误差,需加入积分作用,但积分作用要根据系统偏差和偏差变化率的不同而不断变化,以便能更好地消除稳态误差,同时又不引入不稳定因素.从图2可以看出,普通PID控制和模糊PID控制各有优缺点.普通PID控制响应速度快,调整时间短,但超调大,参数整定难度大;模糊PID控制响应速度较快,超调小,但控制结构较为复杂,调节时间较长.为解决这一问题,笔者提出一种混合结构的模糊PID控制器,以便充分发挥2种控制器的优势,达到最佳的控制效果.混合结构的模糊PID控制器的控制方式如下:

其中:e为偏差;ε为一极小的正值.当取ε=0.01时,仿真图形如图3所示.
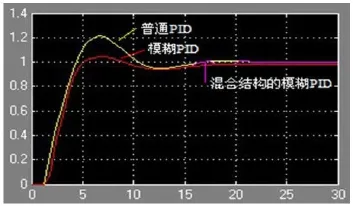
图3 混合结构的模糊PID控制器的仿真曲线图
由图3可以看出,模糊PID控制在超调量、稳态精度和动态性能等方面都优于普通PID控制,而混合结构的模糊PID控制,改善了模糊PID控制的调节时间、稳定性等性能.
3 结语
参数自整定的模糊PID控制器,是利用模糊控制的原理结合PID控制而产生的,它将模糊控制利于非线性、复杂系统的控制和控制性能高、鲁棒性好等优点,与PID控制的控制结构简单、易于实现相融合,并实现了PID参数的自整定.从仿真结果分析,参数自整定模糊PID控制的性能明显优于普通PID控制.基于此,笔者提出了一种混合结构的模糊PID控制器,进一步改善了控制器的性能.
[1]李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2005:10.
[2]李士勇.模糊控制.神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1996.
[3]赵永娟,孙华东.基于Matlab的模糊PID控制器的设计和仿真[J].微计算机信息(测控自动化),2009,25(1):48-50.
[4]丁建强,任晓,卢亚平.计算机控制技术及其应用[M].北京:清华大学出版社,2012:201-202.
[5]李茜,李彬,朱雪丹.模糊自整定PID控制器的设计与仿真[J].化工自动化及仪表,2010,37(3):25-28.
[6]吴振顺,姚建均,岳东海.模糊自整定PID控制器的设计及其应用[J].哈尔滨工业大学学报,2004(11):1 578-1 580.
Research andd IImmprovement of Parameters Self-Tuning Fuzzy PID Controllleerr
LIU Bing1,CHEN Yongjian,ZHOU Yan2
(1.College of Mechanical and Electrical Engineering andAutomation,Shanghai University,Shanghai 200444,China;2.College of Electronic Information and Mechatronic Engineering,Zhaoqing University,Zhaoqing,Guangdong 526061,China)
ractPID control is the simplest and most useful control mode in engineering,but the PID parameters adjustment is difficult and tedious,it is hard to find out the best parameters.Fuzzy control is an intelligent control,making use of expert control experience,which has a series of advantages,such as parameters tune convenience,the good robustness and control performance,but the arithmetic and control structure of it is more complex.Considering the characteristics of composite PID control and fuzzy PID control,we designed an improved mixed fuzzy PID controller structure and described the simulation of the effectiveness of the controller.
ordsfuzzy PID controller;self-tuning;PID controller;MATLAB;Simulink
TP15
A
1009-8445(2016)02-0048-04
(责任编辑:陈静)
2014-12-15
刘冰(1981-),女,黑龙江富锦人,上海大学机电与自动化学院硕士研究生.
