基于切片点云中心的形变监测
2016-07-25苏芬,余锐
苏 芬,余 锐
(广州市城市规划勘测设计研究院,广州 510060)
基于切片点云中心的形变监测
苏芬,余锐
(广州市城市规划勘测设计研究院,广州 510060)
摘要:针对建筑物特征表面的特性,提出基于横断面的切片点云中心的变形监测方法,利用建筑物的某个侧面点云作为约束面,建立约束面和用于提取切片基准面之间的关系,根据基准面与特征表面点云法向量之间的关系模型,确定最佳基准面搜索方法。利用得到的基准面逐层地确定切片点云,对每个切片点云进行分区段重心的求取,通过计算整个区段重心的中心获取切片的重心。利用无变形的建筑物对点云精度进行评价,并将其用于指导隧道的变形监测。通过对比不同期切片重心的变化实现隧道的变形分析。
关键词:变形监测;三维激光;整体最小二乘;切片点云;基准面
随着三维激光扫描技术的不断应用,其在变形监测领域的应用得到了不断的重视,主要是由于该技术不像传统的测量技术那样,只能对某个点进行扫描,该技术可以获取高精度海量的点云数据,并且在扫描过程中,不受天气影响,因此,基于该技术的变形监测也得到了很多学者的研究,如文献[1]利用三维激光扫描仪对岩石壁进行扫描,通过提取特征点的变形实现变形监测;文献[2]将三维激光扫描技术应用在了地铁隧道的变形监测中,并对变形监测结果的精度进行分析;文献[3]在考虑隧道内壁特点的情况下,利用三维激光扫描仪对其内壁进行扫描,并根据点云的变化状况确定隧道顶部变形的区域,相似的方法在文献[4]也有应用。针对隧道内壁特殊的结构,文献[5]采用矢量等距离方法对隧道内壁的点云进行切片提取,利用提取的切片可以实现隧道不同部位的变形分析[6]。总之可以发现,目前有较多的学者根据切片点云的变化来实现形变监测。针对点云切片的提取,文献[7-8]首先实现了点云的随机采样处理,计算采样后点云的密度,根据不同区域的点云密度进行切片点位置的确定,该方法的缺点是点云特征的反映不是特别明显,况且采样过程中采用的Christofides算法时间复杂度达到了O(n4),其用在切片点云获取上效率较低。针对此缺点,文献[9-10]利用移动最小二乘的方法来跟踪切片的提取,该方法实现了精度较高的切片点云提取,但是对于有重复投影状况的点云无法进行使用。获取切片后,文献[11]采用初始点和初始方向来判断切片细化的精度,以此来提高切片细化的精度,该算法对切片细化程度较好,但是不能应用在多重轮廓散乱点云中,同时也无法快速获取建筑物的切片。
为了能够充分利用建筑物表面的点云,本文根据建筑物表面的特性,将点云法向量和基准面的关系引入到切片点云的提取中。通过分析建筑物某一个面的拟合参数与用于切片提取的基准面之间的关系来确定基准面的初始参数;再结合基准面和点云法向量之间的关系,通过基准面不断搜索的方法得到了最佳的基准面;利用逐层切片和基准面互换的方法不断提取切片点云,对提取的切片点云进行分区段的重心获取;利用各个区段的重心点来获取整个切片的重心,通过对比不同期切片重心的变化实现建筑物变形分析。
1基准面与约束面函数关系的建立


(1)

假设扫描的建筑物点云序列为(XiYiZi),i=1,2,…,n,将其进行归一化处理,从而将点云序列的坐标原点移到建筑物区域,则点云序列变为
(2)
假设通过坐标原点的基准面为a1x+b1y+
c1z=0,根据任意约束面垂直于通过坐标原点的基准面,即可得到关系式
(3)
从而建立了基准面和任意约束面之间的函数关系。
2利用法向量确定最佳基准面

(4)
由于基准面与建筑物整体方向垂直,则基准面方程与法向量之间的关系为
(5)
将式(3)与式(5)组合得
(6)
根据式(6)可解得a1,b1,c1的关系为
(7)
将式(7)代入基准面a1x+b1y+c1z=0,可以得到n个基准面的表达式
(8)
(9)

(10)
以此类推,可以得到n个基准面与建筑物表面点云法向量之间的夹角{cosθj1cosθj2…cosθjii=1,…,n,j=1,…,n},其中,i表示的是基准面数,j表示的是法向量数。
计算每个基准面与法向量夹角之和,如式(11)所示。
(11)
搜索最小的sum(cosθji)所对应的基准面
3切片点云提取及中心的计算
由第2节根据扫描点云不同面的法向量,确定最佳基准面,再由最佳基准面计算点云到基准面的距离,设定初始切片到基准面距离,便可实现初始切片的提取,再将初始切片视为初始基准面,再根据第2节进行第2层最佳基准面的搜索,以此类推,便可准确地获取整个建筑物的切片及切片的重心,如图1所示。
图1 切片重心提取所需变量
计算每个切片的重心,传统方法都是直接采用点云拟合的方法获得,该方法虽然简单,但对于噪声抑制不够明显。本文将首先对切片点云进行分段,分别拟合各段的重心,再利用各段的重心拟合得到切片的重心,具体步骤如下:
1)将切片点云投影到XOY平面上,计算得到假重心点O′,以该点为原点建立极坐标系。
3)由于视角的原因,使得点云扫描的过程中存在不均匀,则不同区段内点云数会有差别,为了体现公平区段点云拟合原则,设置区段点云数的最小阈值为q,若某区段内点云数量Pm(m∈N,1≤m≤n)大于阈值q,则对该区段点云进行重心拟合得到区段中心为Om。
4)若区段内点云数Pm小于阈值q,则由相邻区段Om-1,Om+1中心拟合得到该区段中心。
5)根据n个区段中心拟合得到该层切片点云的中心O。
4实例分析
4.1精度指标分析
利用三维激光扫描仪对3S雕塑建筑物进行两次扫描,由于该建筑物没有变形,因此,通过两次扫描的变化量可以确定扫描精度,利用本文方法提取切片,结果如图2所示。
采用本文方法提取两次扫描切片的重心,并根据重心差值确定由扫描误差引起的变化量,结果如图3所示。

图2 目标点云处理前后灰度图

图3 不同方向变化量
由图3可知,两期切片重心x,y,z方向变化量都没超过2 mm。点位中误差最大值为2.714 mm,最小值为0.87 mm,小于2 mm占了75%,因此,点位中误差绝大部分都小于2 mm,且大于2 mm的全部在2 mm左右。而该扫描仪的点位及点云模型精度也是在2 mm左右,因此,在已知激光扫描仪精度的前提下,通过本文方法可进行相关的变形监测。
4.2隧道变形分析
某隧道掌子面由于刚刚开挖,各种防护都没有跟上,所以急需采用各种监测手段来观测其变形情况,以便确保身处第一线的工作人员的安全。为了对其进行区域变形监测,使用Leica ScanStation C10(见图4)对该隧道掌子面进行扫描(见图5),采集不同期的点云数据,由于多期之间的坐标系统不统一,为了实现多期之间点云数据的统一,需要进行基准的确定,为了实现不同期点云基准的统一,需要进行控制点的布设,在不同扫描的过程中,将用于点云基准统一的标靶布设在控制点上,从而可实现多期扫描点云数据统一在第1期扫描中。并将第1期作为其基准数据,利用本文提出的方法分析隧道内壁的变形状况。由于该扫描距离为10 m,因此,其扫描的特征点位精度为2 mm, 扫描的模型表面精度为2 mm,该扫描精度只是适用于扫描距离较近的情况(一般在50 m以内)。根据隧道工程变形监测控制标准,区间跨度<8 m时,隧道区间的地表沉降允许位移控制值为30 mm,拱顶沉降允许位移控制值为30 mm,因此,该方法完全满足对隧道区间跨度变形的监测。扫描的隧道点云影像图,如图6(a)所示。由于扫描的过程中,受外界很多因素的影响,使得隧道内壁会产生大量的噪声,为了能够准确地对隧道内壁的变形状况进行分析,需要对噪声进行剔除,噪声剔除后的点云,如图6(b)所示。
图4 Leica ScanStation C10及其使用的标靶

图5 隧道扫描现场
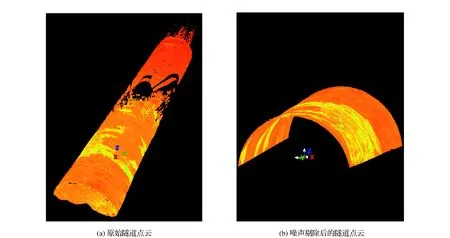
图6 隧道点云
采用本文方法提取隧道内壁的切片点云,如图7所示。由图7可知,利用本文方法提取的隧道内壁切片相对于原始隧道没有发生扭曲或变化,从而验证了本文方法提取切片的可行性。计算不同期切片点云的重心,结果如表1所示。
根据表1不同期的切片重心,计算两次重心差值,结果如图8所示。
由图8可发现,两期切片重心,x方向变形量最大值接近10 mm,最小值为1 mm左右;y方向变形量最大值为5 mm左右,最小值为2 mm左右,z方向变形量最大值为3 mm左右,最小值为1 mm左右,同时点位中误差最大值为11 mm,最小值为2 mm左右,该仪器在50 m以内扫描的特征点位精度在2 mm以内,模型精度在2 mm以内,由4.1节分析可知,两期差值在2 mm左右时,可认为无变形。由图8(d)可知,第1个切片和第2个切片变化量在2 mm左右,该变化量主要由激光扫描仪误差引起的,可认为第1个和第2个切片没有变形,而从第3个切片开始,变化量逐渐增大,且变化量超过了2 mm,说明从第3个切片开始隧道内壁出现了变形,且变形量逐步增大。而第1个切片到第7个切片属于开挖时间不同的区域,第1个切片属于掌子面开挖比较久的区域,其隧道内壁比较稳定,而第7个切片属于掌子面刚开挖的区域,隧道内壁不稳定,会出现脱落等现象。因此,越是开挖比较久的区域变化量越小,隧道内壁越稳定,而越是刚开挖的区域变化量越大,隧道内壁越不稳定。

图7 隧道内壁切片点云

切片数123456-1.01750-0.96650-1.04890-1.08710-1.13660-1.41730一期切片重心-4.81878-5.53008-6.01948-6.41468-6.91148-7.466980.956010.974910.957110.945410.970011.06211-1.01830-0.96750-1.04590-1.09050-1.13130-1.42230二期切片重心-4.82058-5.52808-6.01558-6.41768-6.91648-7.472280.956710.976410.958710.946410.969011.06431
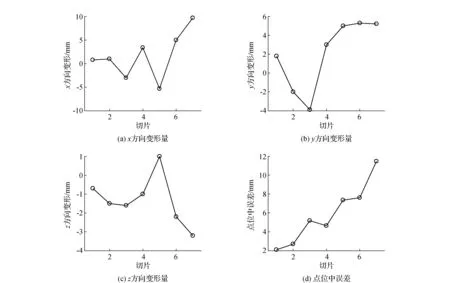
图8 不同方向变形分析结果
5结论
本文根据隧道内壁的特点,提出了提取隧道内壁横断面的切片点云算法,应用该算法可以在不用标靶张贴的情况下自动提取隧道的基准面,并利用该基准面,通过逐层切片和基准面的互换提取较为准确的切片点云。通过实例,验证该算法可以快速、准确地自动获取隧道内壁的切片点云,对于提取的切片点云,本文利用分段区域重心拟合的方法计算每个切片的重心,并基于对无变形建筑物的切片变化状况,在已知扫描精度的前提下,验证该算法用于变形监测的可行性,并得到了变形监测的精度。同时,经过不同期扫描某个正在开挖的隧道内壁点云的对比分析,通过对不同部位隧道内壁点云切片的分析,验证了不同开挖状况区域的隧道内壁变形状况,利用不同期相同切片重心的变化状况及扫描点云精度指标,实现了隧道的变形监测。
参考文献:
[1]Monserrat O,CROSETTO M.Deformation measurement using terrestrial laser scanning data and least squares 3D surface matching[J].ISPRS Journal of Photogrammetry & Remote Sensing 63,2008:142-154.
[2]康志忠,托雷,王保前,等.基于三维激光扫描的地铁隧道连续形变监测数据处理软件系统[J].测绘工程,2013,22(5):82-88.
[3]简骁,童鹏.基于地面激光雷达技术的隧道变形监测方法研究[J].铁道勘察,2011(6):19-21.
[4]李健,万幼川,江梦华,等.基于地面激光技术的隧道变形监测技术[J].地理空间信息,2012,10(1):14-17.
[5]吕震.反求工程CAD建模中的特征技术研究[D].杭州:浙江大学,2002:70-102.
[6]孟娜.基于激光扫描点云的数据处理技术研究[D].济南:山东大学,2009.
[7]刘云峰,柯映林.反求工程中的混合切片技术[J].计算机辅助设计与图形学学报,2003,15(3):741-745.
[8]柯映林,王青.反求工程中点云切片算法研究[J].计算机辅助设计与图形学学报,2005,17(8):1798-1802.
[9]龚友平,陈国金,陈立平.基于切片方法截面数据处理[J].计算机辅助设计与图形学学报,2008,20(3):321-325.
[10] 盖绍彦,达飞鹏,雷明涛,等.三维重构中的杂乱点云排序问题研究[J].计算机与现代化,2003,98(10):33-35.
[11] 龚友平,金涛,童水光.截面切片数据的自动细化算法[J].浙江大学学报(工学版),2008,42(2):337-340.
[12] 浮丹丹,周绍光,徐洋,等.基于主成分分析的点云平面拟合技术研究[J].测绘工程,2014,23(4):20-24.
[13] 张贤达.矩阵分析与应用[M].北京:清华大学出版社,2004.
[14] HOPPE H,DEROSE T,DUCHAMP T,et al.Surface reconstruction from unorganized points[C]//ACM Siggraph 1992,1992:71-78.
[15] Huang H,Li D,Zhang H,et al.Consolidation of unorganized point clouds for surface reconstruction[J].ACM Trans Graph,2009,28(5):176.
[责任编辑:刘文霞]
DOI:10.19349/j.cnki.issn1006-7949.2016.08.013
收稿日期:2015-05-10
作者简介:苏芬(1978-),男,工程师.
中图分类号:TU196
文献标识码:A
文章编号:1006-7949(2016)08-0057-08
The deformation monitoring based on the center of point cloud of slice
SU Fen,YU Rui
(Guangzhou Urban Planning Survey Design and Research Institute,Guangzhou 510060,China)
Abstract:This paper proposes a deformation monitoring method,based on the center of point cloud of slice.First,the relationship between the constraint plane and the datum is constructed on one side of the building.The search method of best datum is determined according to the relationship between the datum and normal vectors of point cloud.Second,the point cloud of slice is determined by using the datum,and the local center of each sect1 of the slice is computed.The center of slice is determined according to the center of the whole local center.The building of non-deformation is used to evaluate the point cloud accuracy.Finally,the deformation monitoring of building is done according to the comparison between different centers of point cloud of slice.
Key words:deformation monitoring;3D laser;total least squares;point cloud of slice;datum plane
