伸缩机翼动力学实验研究*
2016-05-19崔云涛张伟李亚南
崔云涛 张伟李亚南
(北京工业大学机电学院,机械结构非线性振动与强度北京市重点实验室,北京 100124)
伸缩机翼动力学实验研究*
崔云涛 张伟†李亚南
(北京工业大学机电学院,机械结构非线性振动与强度北京市重点实验室,北京 100124)
伸缩机翼作为一种可变形翼,变形过程中,由于其结构时变特性严重且具有柔性体特点,翼面横向振动特性实时变化从而影响飞行性能.基于伸缩机翼实验模型,分别开展了伸缩机翼模态实验研究和振动实验研究,即通过PLC控制系统控制伺服电机转速及转向,进而改变活动机翼外伸长度及伸缩速度,一方面利用锤击法获得五种活动机翼外伸长度下前三阶模态参数;另一方面利用ICP加速度传感器、LMS数据采集分析系统采集并处理活动机翼伸缩过程中横向振动加速度信号,获得伸缩速度与最大振动幅值、最大响应频率之间关系.结果表明,活动机翼外伸长度增加,结构固有频率值减小;伸缩速度作为参数激励,其等效激励与活动机翼某一外伸长度下某一阶固有频率值相近而导致颤振.为伸缩机翼翼面振动控制和伸缩速度合理选择提供理论依据和技术支持.
可变形翼, 伸缩机翼, 模态实验, 振动实验
引言
常规固定机翼飞行器几何外形通常只针对飞行高度、航程、马赫数等指标选取其中一种或两种进行最优设计,而对其它指标进行折衷处理.由于在飞行任务过程中,不同飞行阶段飞行参数不断变化,常规固定机翼飞行器则无法获得理想飞行性能.与常规固定机翼飞行器不同,变形机翼飞行器可在飞行过程中通过改变机翼参数进而改变其结构,以最优气动特性满足不同飞行状态对于飞行动力学要求,极大提高飞行器适用性和利用率[1-3].伸缩机翼可通过调整翼展长度改变机翼面积、展弦比等,满足多任务点设计要求.如亚音速巡航任务阶段翼展长度增长,展弦比增大,诱导阻力降低,升阻比减小,航程明显增长;超音速攻击任务阶段翼展长度缩短,展弦比减小,波阻降低,升阻比增大,机动性能显著提高.
Blondeau等[4-5]基于充气伸缩梁概念研制充气伸缩机翼并开展低速风洞实验研究,研究结果表明相较于固定机翼其气动特性更为优越.Mestrinho等[6-7]进行了伸缩机翼非对称翼展长度滚转率研究分析并开展机翼弯曲测试,研究表明非对称翼展长度伸缩机翼可代替副翼实现滚转控制.Vocke等[8]利用零泊松比蜂窝结构和纤维增强柔性复合材料蒙皮制作了伸缩机翼模型,风洞试验研究表明其翼展变形量可达100%.Krvvokhattko等[9]开展了伸缩机翼无人机气动特性实验研究,研究表明当伸缩机翼活动翼弦长与固定翼弦长之比不小于0. 86时,关节涡流相较于翼尖涡流可忽略不计.张伟等[10]利用ANSYS对不同翼展长度伸缩机翼进行了有限元仿真,证明所设计传动系统可作为伸缩式变形翼飞行器的变形方案.陈亚楠和余本嵩等[11]研究发现机翼伸展过程中升阻系数改变,飞行器将发生变速沉浮运动.李士途和李军府等[12]采用气动力计算、风洞试验、缩比飞行模型研究等手段对机翼展开与收缩等不同状态的气动特性进行了分析,验证了其伸缩机翼变体飞机气动布局方案可行.李闻和宋笔锋等[13]基于钢索绞盘传动机构研制飞翼布局变形机翼并进行风洞实验和外场飞行试验,结果表明通过实时控制机翼气动外形可保持较高气动效率.李伟和熊克等[14]设计了一种用于变体翼梢小翼的伸缩栅格,并采用计算流体力学与风洞实验相结合方法分析了变体翼梢小翼高度变化对机翼翼尖尾涡流动结构和升阻特性影响,结果表明增大翼梢小翼高度可显著降低翼尖尾涡强度、阻力系数.
本文基于伸缩机翼实验模型,利用加速度传感器、移动式数据采集前端、软件分析系统等搭建实验平台,分别开展伸缩机翼模态实验研究和振动实验研究,探讨活动机翼不同外伸长度下模态参数变化规律及伸缩速度和翼面振动特性之间关系.
1 伸缩机翼实验模型
伸缩机翼实验模型如图1,主要由固定机翼、活动机翼、传动系统、安装平台及PLC控制系统五部分组成.
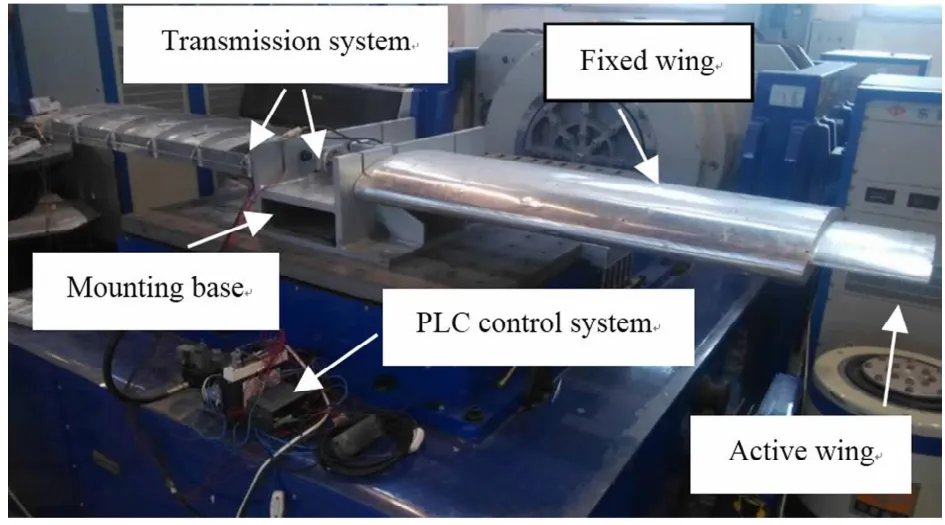
图1 伸缩机翼试验模型Fig.1 Experimentalmodel of telescoping wing
固定机翼和活动机翼均由前缘、盒式梁、翼肋、后缘、蒙皮、桁条组成,材质为航空铝7075,其翼展长度及翼肋基本参数如表1.

表1 基本参数Table 1 Basic parameters
传动系统由电机、锥齿轮、滚珠丝杠组成.伺服电机型号为Panasonic-MSMD042P1U交流伺服电机;锥齿轮传动比为2∶1,齿轮模数1,大锥直齿轮齿数40,小锥直齿轮齿数20;滚珠丝杠为双头螺纹、直径20mm、螺距5mm.
伸缩机翼实验模型工作原理为PLC控制系统控制伺服电机旋转速度及旋转方向,电机与小锥齿轮通过键连接同步转动,将电机转动转换为与其垂直安置左右两个大锥齿轮转动,大锥齿轮与丝杠通过键连接同步转动,丝杠螺母与活动机翼通过螺栓固定,丝杠转动转换为活动机翼收缩运动进而实时改变活动机翼外伸长度.
2 模态实验研究
伸缩机翼一般可简化为可伸缩梁模型进行理论研究,而梁、板等结构的各种理论研究离不开动力学实验研究给予验证.在本实验中,采用锤击法对伸缩机翼实验模型进行模态实验,研究活动机翼外伸0mm、外伸200mm、外伸400mm、外伸600mm、外伸800mm五种长度实验模型振型和固有频率变化规律,模态实验设备和测试系统如图2,实验流程示意图如图3.
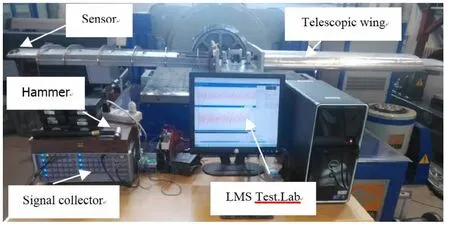
图2 实验设备和测试系统Fig.2 Experimental devices and measurement system
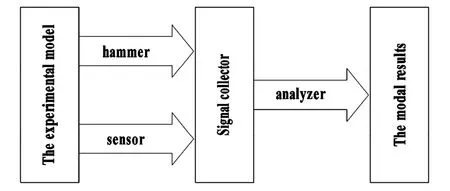
图3 实验流程Fig.3 Experimental flowchart
利用移动激励点、固定响应点锤击法开展模态实验研究.首先,确定测点位置并粘贴ICP加速度传感器(B&K4517型),测点布置应遵循:反映实验模型基本外形和特征;非对称布置;避开振型节点位置.其次,通过线缆连接力锤(联能LC-02A型)、传感器、数据采集前端(LMSSCADASMobile SCM01移动式)、计算机.再次,在Impact Testing模块中标定传感器灵敏度值,建立几何模型并将实际测点与几何模型对应点进行关联,设置相关参数(通道设置、采样参数及窗函数等),控制锤击力度以微小振幅激励实验模型,通过力传感器(联能CL-YD-312型)和加速度传感器,同步通过数据采集前端,采集脉冲激励和加速度响应信号.最后,在Modal Analysis模块中处理脉冲激励和加速度响应信号,采用Poly-MAX模态参数识别法进行模态参数识别.活动机翼五种外伸长度实验模型前3阶固有频率如表2.
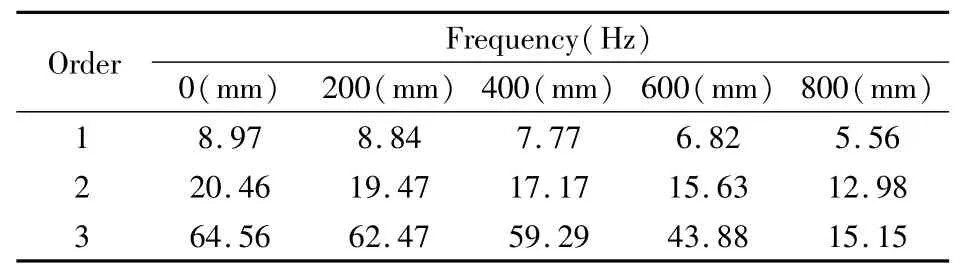
表2 活动机翼五种外伸长度前3阶固有频率Table 2 Initial third order natural frequency of active wing in five conditions
由表2可知,随着活动机翼外伸长度增加,各阶模态对应固有频率值随之降低,即结构越长振动频率越小.
活动机翼外伸400mm前三阶振型如图4.
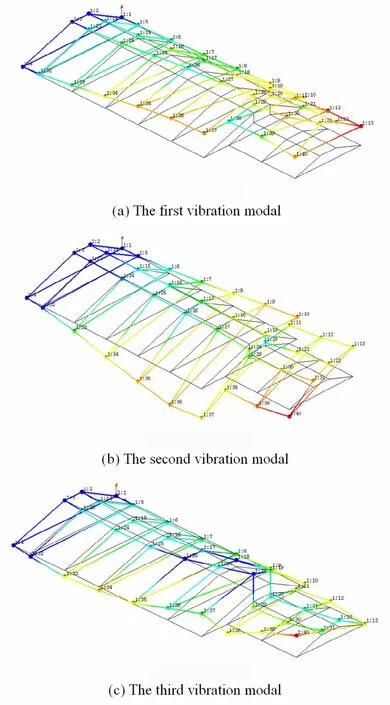
图4 外伸400mm前三阶振型Fig.4 Initial third order vibration modal for extended 400mm
由图4可知活动机翼外伸400mm第一阶模态振型为弯曲振动,第二阶模态振型为扭转振动,第三阶模态振型为扭转振动.
活动机翼外伸800mm前三阶振型如图5.
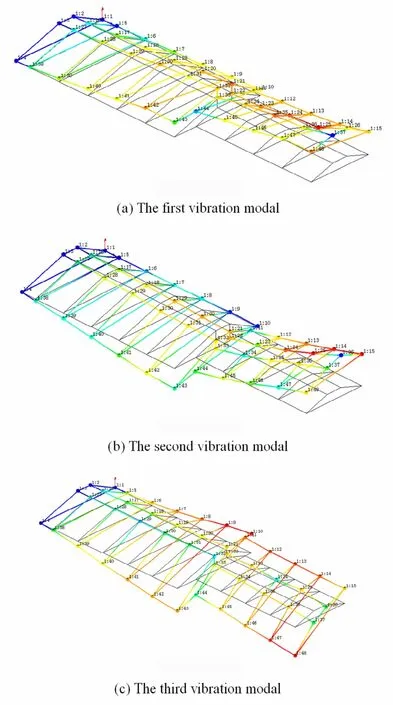
图5 外伸800mm前三阶振型Fig.5 Initial third order vibration modal for extended 800mm
由图5可知活动机翼外伸800mm第一阶模态振型为弯曲振动,第二阶模态振型为弯扭耦合振动,第三阶模态振型为扭转振动.由此可见,结构模态随着活动机翼外伸长度增加,第一阶模态振型一致,一阶以上各阶模态振型不再一致.
3 振动实验研究
通过增大伸缩速度从而减少变形所需时间,将显著提高伸缩式变形机翼飞行器在不同飞行环境下适应能力.但伸缩速度作为参数激励,当其与伸缩机翼某一阶固有频率相接近时会导致颤振产生,严重影响飞行器飞行性能.
为了研究伸缩速度与翼面振动响应之间关系,确定伸缩速度为控制因素进行振动实验研究.首先,确定固定机翼最外端和活动机翼最外端两点为测点并粘贴ICP加速度传感器(B&K 4517型).其次,通过线缆连接传感器、数据采集前端(LMS SCADASMobile SCM01移动式)、计算机.再次,在Signature Testing模块中标定传感器灵敏度值,设置相关参数(通道设置、采样参数及触发方式选择等),改变活动机翼伸缩速度即速度以4mm/s为单位从70mm/s逐渐增加至142mm/s,传感器通过数据采集前端采集加速度响应信号.最后,在Signature Testing模块中对加速度振动信号进行去直流分量、重采样、滤波、积分、傅里叶变换等处理分别获得位移时间历程图、频谱图.对位移时间历程图进行分析处理可得,外伸速度与最大振动幅值关系如图6,收缩速度与最大振动幅值关系如图7.
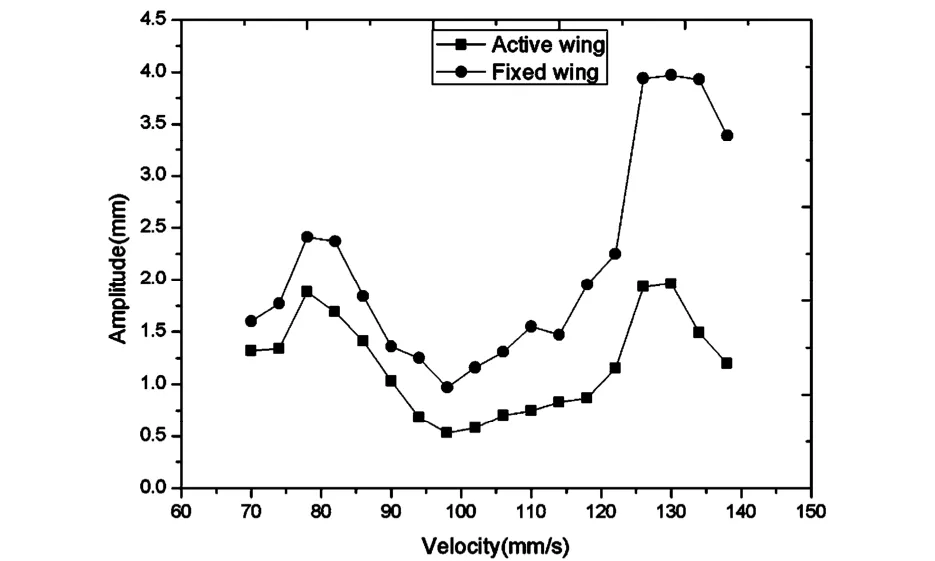
图6 外伸速度与最大振动幅值关系Fig.6 Relationship between extended velocity and maximum vibration amplitude
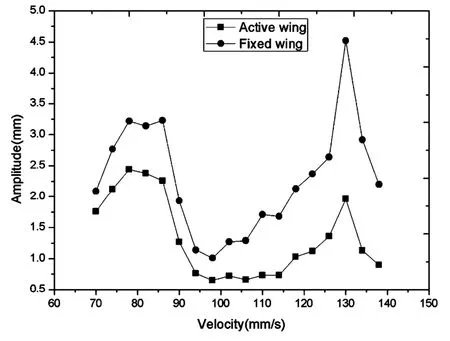
图7 收缩速度与最大振动幅值关系Fig.7 Relationship between retracted velocity and maximum vibration amplitude
由图6、图7可知:
1)活动机翼外伸状态振动曲线变化趋势与收缩状态一致,活动机翼振动幅值较固定翼大;
2)伸缩速度在70mm/s至78mm/s和102mm/s至134mm/s两段区间,随着速度增加,翼面最大振动幅值呈现增大趋势;
3)当速度分别增至78mm/s和134mm/s时,横向振动十分剧烈,振动幅值达到最大;
4)速度在78mm/s至102mm/s和134mm/s至142mm/s两段区间,随着速度增加,翼面最大振动幅值呈现减小趋势;
5)当速度为102mm/s时,横向振动幅值相比于其它速度为最小.
对频谱图进行分析处理可得,外伸速度与最大响应频率值之间关系如图8,收缩速度与最大响应频率值之间关系如图9.
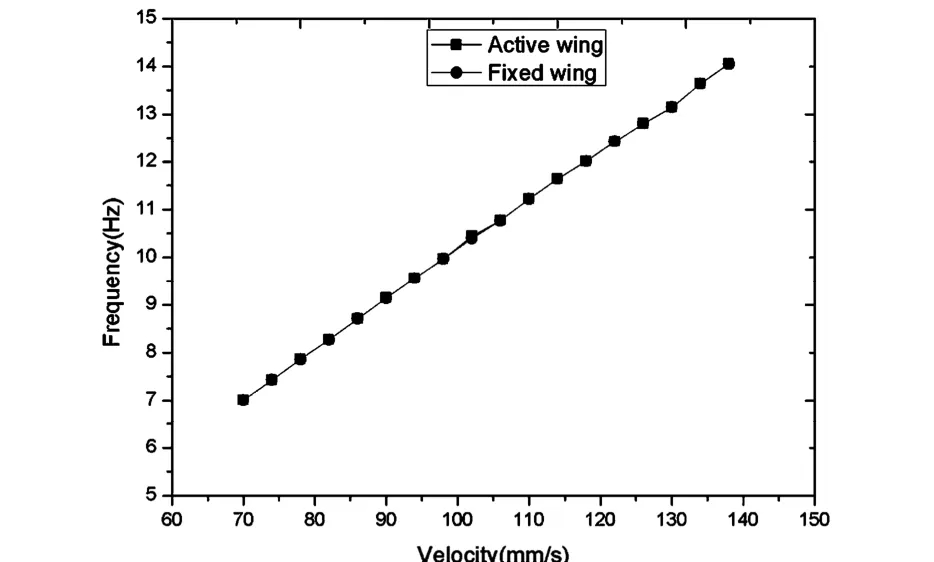
图8 外伸速度与最大响应频率关系Fig.8 Relationship between extended velocity and maximum response frequency

图9 收缩速度与最大响应频率关系Fig.9 Relationship between retracted velocity and maximum response frequency
由图8、图9可知:
1)活动机翼外伸状态响应频率曲线变化趋势与收缩状态基本一致,速度增大,最大响应频率随之增大,呈线性变化趋势;
2)当伸缩速度增至78mm/s时,外伸状态和收缩状态对应最大响应频率值分别为7.86Hz和7.99Hz,与模态实验活动机翼外伸400mm时一阶弯曲固有频率值7.77Hz相近,表明此刻速度对机翼激励频率与该阶固有频率相近而达到共振,导致颤振产生;
3)当电机转速增至134mm/s时,外伸状态和收缩状态对应最大响应频率值分别为13.15Hz和13.41Hz,与模态实验活动机翼外伸800mm时二阶弯扭耦合固有频率值12.98Hz相近,表明此刻速度对机翼激励频率与该阶固有频率相近而达到共振,导致颤振产生.
4 小结
本文以伸缩机翼实验模型为研究对象,采用锤击法开展了伸缩机翼模态实验研究,分别获取活动机翼不同外伸长度即0mm,200mm,400mm,600mm,800mm结构前三阶固有频率和振型,发现随着外伸长度增加,各阶对应固有频率呈现递减趋势.此外,第一阶模态振型均为弯曲振动,而一阶以上各阶对应模态振型不同.
完成了伸缩机翼振动实验研究.分析表明,活动机翼外伸状态振动曲线变化趋势与收缩状态一致,且活动机翼振动幅值较固定翼大.当伸缩速度分别为78mm/s、134mm/s等效激励与活动机翼外伸长度分别为400mm一阶固有频率、800mm二阶固有频率相近而达到共振,导致颤振产生.伸缩速度自70mm/s至78mm/s和102mm/s至134mm/s,随着速度增大,翼面振动幅值呈现增大趋势.伸缩速度自78mm/s至102mm/s和134mm/s至142mm/s,随着速度增大,翼面振动幅值呈现减小趋势.伸缩速度为102mm/s,翼面横向振动幅值相较于其他速度为最小.文章为伸缩式可变体飞行器活动机翼伸缩速度合理选择和翼面振动控制提供重要参考依据.
1 Bae JS,Seigler TM,Inman D J.Aerodynamic and static aeroelastic characteristics of a variable-span morphing wing.Journal of Aircraft,2005,42(2):528~534
2 Neal D,Good M,Johnston C,etal.Design and wind-tunnel analysis of a fully adaptive aircraft configuration.In:45th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,Palm Springs,California,AIAA 2004~1727
3 Bubert E A,Woods B K S,Lee K,etal.Design and fabrication of a passive 1D morphing aircraft skin.Journal of IntelligentMaterial Systems and Structures,2010,21(17):1699~1717
4 Blondeau JE,Richeson J,Pines D J.Design,development and testing of a morphing aspect ratio wing using an inflatable telescopic spar.In:44th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,Norfolk,Virginia,AIAA 2003~1717
5 Blondeau JE,Pines D J.Design and testing of a pneumatic telescopic wing for unmanned aerial vehicles.Journal of Aircraft,2007,44(4):1088~1099
6 Mestrinho JR C,Felicio JM I,Santos PD,etal.Design Optimizatiion of a variable~span morphing wing.In:2nd International Conference on Engineering Optimization,Lisbon,Portugal,2010:1~11
7 Mestrinho J,Gamboa P,Santos P.Design optimization of a variable-span morphing wing for a small UAV.In:52nd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,Denver,Colorado,AIAA 2011~2025
8 Vocke R D,Kothera C S,Woods B K S,et al.Development and testing of a span-extendingmorphing wing.Journal of Intelligent Material Systems and Structures,2011,22(9):879~890
9 Kryvokhatko IS,Sukhov V V.Experimental investigation of aerodynamic performance of a small UAV with a telescopic wing.In:The 2013 IEEE 2nd International Conference“Actual Problems of Unmanned Air Vehicles Developments”Proceedings,2013:17~20
10 Zhang W,Jia P.FEM analysis of telescoped morphing wing.In:The 3nd International Conference on Mechanic Automation and Control Engineering,2012:516~520
11陈亚楠,余本嵩,金栋平.机翼伸展对低速飞行状态的影响.动力学与控制学报,2014,12(1):44~49(Chen Y N,Yu B S,Jin D P.The effect ofwingspan change on low speed flight of amorphing aircraft.Journal of Dynamics and Control,2014,12(1):44~49(in Chinese))
12李士途,艾俊强,李军府等.伸缩机翼变体飞机气动布局初步研究.航空科学技术,2014,25(1):25~28(Li S T,Ai JQ,Li J F,et al.Aerodynamic configuration re-search of variable-span wing morphing aircraft.Aeronautical Science&Technology,2014,25(1):25~28(in Chinese))
13李闻,宋笔锋,张炜.飞翼布局无人机变形机翼设计与模型验证研究.飞行力学,2010,28(4):17~20(LiW,Song B F,ZhangW.Configuration design and experiment study of an adaptive wing for UAV.Flight Dynamics, 2010,28(4):17~20(in Chinese))
14李伟,熊克,陈宏等.用于变体翼梢小翼的伸缩栅格研究.航空学报,2011,32(10):1796~1805(LiW,Xiong K,Chen H,et al.Research of retractable grid applied to morphing winglet.Acta Aeronautica et Astronautica Sinica,2011,32(10):1796~1805(in Chinese) )
EXPERIMENTAL RESEARCH ON DYNAM ICSOF TELESCOPICW ING*
Cui Yuntao Zhang Wei†Li Yanan
(Beijing Key Laboratory of Nonlinear Vibrations and Strength of Mechanical Structures,College of Electrical Engineering,Beijing University of Technology,Beijing 100124,China)
As telescopic wing is a kind ofmorphingwing,due to the characteristics of the time-varying and flexible body of the structure,its flight performance is influenced by the time-varying transverse vibration in the process ofmorphing.In this paper,modal experiment and vibration experiment of telescopic wingswere completed,where the active wing at different positions and with different velocity is determined by the rotational speed and the direction of the servomotor,and the rational speed and direction is controlled by the PLC control system. On the one hand,modal experiment of active wing in five conditions is carried out using the hammeringmethod,and the initial third order nature frequency andmodal shape is obtained.On the other hand,the transverse vibration of active wing in the process ofmorphing is investigated and collected by the ICP acceleration sensor aswell as the LMSdata acquisition and analysis system.The relationship between velocity andmaximum vibration amplitude,and the relationship between velocity and maximum response frequency are obtained.The analysis results show that the longer the length of activewing is,the lower the nature frequency is.As the velocity is a parametric excitation,when the equivalent excitation of the velocity equals to the specific nature frequency of active wing in specific conditions,the structure resonance occurs.The studies in this paper can provide theoretical basis and technical support in investigating the vibration control and the reasonable velocity of the wing.
morphing wing, telescopic wing, modal experiment, vibration experiment
10.6052/1672-6553-2016-028
2016-02-24收到第1稿,2016-03-29收到修改稿.
*国家自然科学基金资助项目(11290152,11272016)
†通讯作者E-mail:sandyzhang0@yahoo.com,cyt1053284151@126.com
Received 24 February 2016,revised 29 March 2016.
*The project supported by the National Natural Science Foundation of China(11290152,11272016)
†Corresponding author E-mail:sandyzhang0@yahoo.com,cyt1053284151@126.com