基于改进CMAC和PID的开关磁阻电机转速控制
2015-12-16姚艳芝赵明波
林 浩, 姚艳芝, 赵明波
(山东理工大学计算机科学与技术学院, 山东淄博 255049)
基于改进CMAC和PID的开关磁阻电机转速控制
林浩, 姚艳芝, 赵明波
(山东理工大学计算机科学与技术学院, 山东淄博 255049)
摘要:由于开关磁阻电机的非线性,常规的线性控制方法难以取得良好效果.针对这一问题,对CMAC(小脑关节模型控制器)的权值调整算法进行了改进,设计了基于改进的CMAC和PID复合控制的转速控制系统,通过电流斩波控制实现电机的转速控制.使用CMAC实现前馈控制,PID实现反馈控制,利用CMAC输出误差小、实时性好、鲁棒性强的特点,改善常规PID控制的效果.利用Matlab对电机空载启动、负载启动、设定转速增加、设定转速减少、突加负载、突卸负载等情况进行了仿真,结果表明在上述情况下,电机都能够在设定的转速平稳运行.
关键词:CMAC; PID; 开关磁阻电机; 转速控制
开关磁阻电机是利用磁阻最小原则进行工作的一类电机,具有调速范围宽、控制方案灵活、结构简单、成本低、可靠性高等优点.由于开关磁阻电机具有强非线性,所以很多学者采用智能控制方法对其进行控制,如文献[1]提出了一种基于论域自调整技术的模糊PID控制方法,文献[2]将模糊自适应控制应用到开关磁阻电机的调速中,文献[3]提出了一种基于滑模变结构的转矩分配控制策略,文献[4]设计了基于自抗扰理论的直接转矩控制系统,文献[5]设计了模糊自整定PID复合控制器用于调速控制.CMAC(CerebellarModelArticulationController,小脑关节模型控制器)具有良好的非线性逼近能力,本文采用CMAC与PID复合控制的方法,实现前馈反馈控制,利用电流斩波控制实现开关磁阻电机的调速.
1 CMAC神经网络
CMAC是一种表达复杂非线性函数的表格查询型自适应神经网络[6],它把输入空间分成许多分块,每个分块指定一个实际存储器位置,每个分块学习到的信息分布式地存储到相邻分块的位置上.通常存储单元数比输入空间的分块数要少,因此多个分块会映射到同一个存储器地址.
CMAC网络由输入层、中间层和输出层组成.输入层对n维输入空间进行划分,中间层由若干个基函数构成.中间层的基函数与输出层的网络输出之间通过连接权连接.权值的调整采用梯度下降法实现.
CMAC的输入输出之间的非线性关系通过概念映射、实际映射来实现[6].概念映射是从输入空间到概念存储器的映射,输入空间映射到概念存储器中的c个存储单元.输入空间中邻近的两个点,在概念存储器中有部分的重叠单元被激励,且距离越近重叠的单元越多.实际映射是由概念存储器中的c个单元,用编码技术映射到实际存储器的c个单元,在这些单元中存放着相应的权值,实际存储器中c个单元的权值之和作为CMAC网络的输出.
CMAC是基于局部学习的神经网络,且具有一定的泛化能力,能够学习任意多维非线性映射,可应用于动态建模、非线性函数逼近、控制系统设计等领域.
2 仿真模型设计
本文设计的转速控制系统如图1所示.图1中电机本体采用Simulink库中的三相6/4极开关磁阻电机模型.其参数为:定子电阻0.05Ω、转动惯量0.05kg·m2、最大电流210A.电机的电流输出是三相电流值,电机转速输出的单位是rad/s.
位置传感器模块将输入的转速值由“弧度/秒”转换为“角度/秒”,再通过积分、取余运算算出转子的位置.当某一相的偏差角位于开通角值和关断角值之间时,Out端输出1即该相导通,否则Out端输出0即该相关断.本文采用电流斩波控制电机转速,开通角和关断角采用固定数值.
2.1CMAC和PID的复合控制
本文采用CMAC和PID复合控制实现前馈反馈控制,通过对开关磁阻电机的电流进行斩波控制,进而实现对电机转速的控制.CMAC和PID复合控制仿真图如图2所示.其中,CMAC实现前馈控制,PID实现反馈控制.
Gain模块将电机输出的转速由“弧度/秒”转换成“转/分”.
PID模块采用Simulink库中的两输入端PIDController模块,本文中其P、I、D参数分别为12、0.2、0,输出范围限定为-100~200.
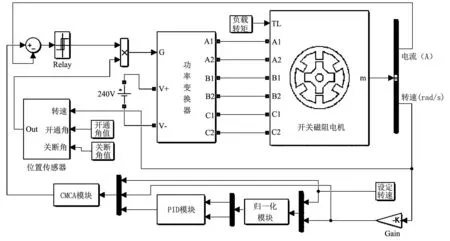
图1 转速控制系统

图2 CMAC和PID复合控制部分
由于PID的参数值设置后难以调整,所以在PID模块的前边设置了归一化模块,对设定转速和电机当前转速进行归一化处理,使PID在整个调速区间都能有较好的控制效果.归一化模块使用Matlab的S函数实现.
CMAC模块也采用Matlab的S函数实现.
其概念映射算法为:
将输入空间S在区间[Smin,Smax]上分成N+2c个量化间隔,即
Δv=(Smax-Smin)/(N-1)
(1)
v1…vc=Smin
(2)
vj=vj-1+Δv(j=c+1,…,c+N)
(3)
vN+c+1…vN+2c=Smax
(4)
本文中取N=300,c=5.
其实际映射算法为
(5)
其k时刻的输出算法为
(6)
u(k)=un(k)+up(k)
(7)
其中:w为权值,初始值为0;up为PID模块的输出.为防止电路电流过大,需要对u的最大值进行限制.本文中u的最大值设为200.
CMAC模块通过δ学习规则调整权值,权值调整指标为
(8)
传统的CMAC权值调整算法为
(9)
w(k)=w(k-1)+Δw(k)+α(w(k)-w(k-1))
(10)
其中:η为学习速率,取值在0和1之间;α为惯性量,取值也在0和1之间;α、η的值可通过实验测试选定.对于本文中采用的系统模型,经实验选定的α、η的数值较小,不利于电路实现.为了解决这个问题,本文通过引入一个新的调整系数β,对CMAC的权值调整算法进行了改进,即将公式(10)修改为如下的公式:
w(k)= β·w(k-1)+Δw(k)+
α(w(k)-w(k-1))
(11)
当β=1时,即为传统的CMAC权值调整算法.减小β值可以使α、η的数值升高,有利于电路实现.采用公式(11)后,本文中α、β、η的值分别为0.039、0.992、0.1.
2.2 电流斩波控制
电流斩波控制部分如图3所示.
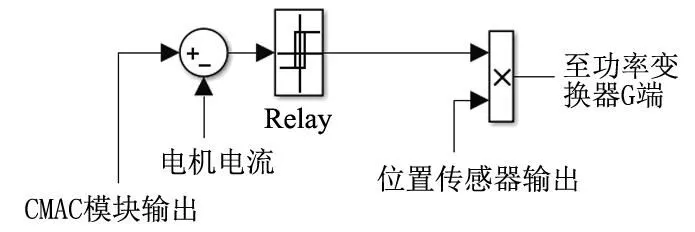
图3 电流斩波控制仿真图
位置传感器的输出如前所述,CMAC模块计算出的电流参考值和电机当前的电流值相减后送入滞环比较器Relay模块,本文中Relay模块的参数设为±10.
当位置传感器输出为0时,向功率变换器G端输出0,使功率变换器的主开关器件关断,电机电流下降,此时CMAC的输出不起作用.当位置传感器输出为1时,Relay模块的输出值等于功率变换器G端的输入值.若电机电流向上增长超过参考值10A时,Relay模块输出0,使电机电流下降.当电机电流下降到低于参考值10A时,Relay模块输出1,使功率变换器的主开关器件导通,电机电流上升,从而实现电流斩波控制.
3 仿真实验与结果分析
针对电机的不同工作状况,对电机空载启动、负载启动、设定转速增加、设定转速减少、突加负载、突卸负载等情况使用Matlab进行了仿真.
(1)空载启动.设定电机转速为3 000r/min.电机空载启动时的转速仿真曲线如图4(a)所示,CMAC模块输出曲线如图4(b)所示.可见电机无明显超调,能够平稳保持在设定转速上.

(a)转速仿真曲线

(b)CMAC模块输出曲线图4 空载启动
(2)负载启动.设定电机转速为3 000r/min,负载转矩为20N·m,负载启动时的转速仿真曲线如图5(a)所示,CMAC模块输出曲线如图5(b)所示.可见电机无明显超调,由于有电机最大电流的限制,负载情况下转速提升的速度比空载要慢.

(a)转速仿真曲线

(b)CMAC模块输出曲线图5 负载启动
(3)设定转速增加.电机负载转矩20N·m,0.25s时设定转速从3 000r/min增加到3 500r/min,转速仿真曲线如图6(a)所示,CMAC模块输出曲线如图6 (b)所示.可见电机能较好地跟随设定转速.

(a)转速仿真曲线
(b)CMAC模块输出曲线图6 设定转速增加
(4)设定转速减少.电机负载转矩20N·m,0.25s时设定转速从3 000r/min减少到2 500r/min,转速仿真曲线如图7(a)所示,CMAC模块输出曲线如图7(b)所示.可见电机能较好地跟随设定转速.
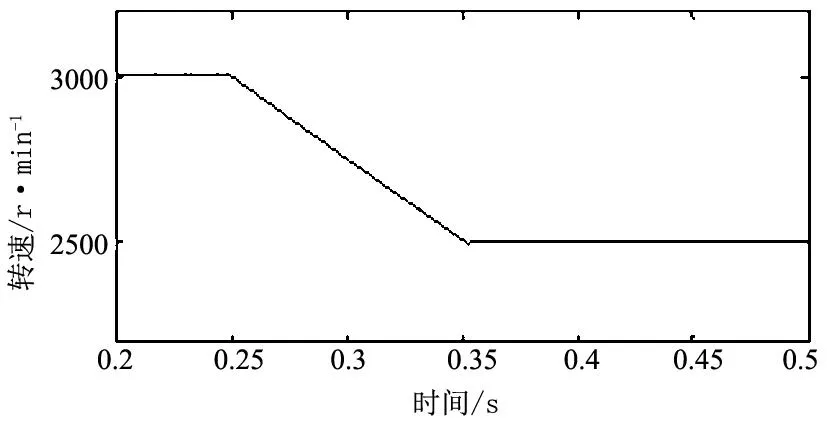
(a)转速仿真曲线

(b)CMAC模块输出曲线图7 设定转速减少
(5)突加负载.电机空载、转速3 000r/min,0.25s时,负载转矩从0加至20N·m,转速仿真曲线如图8(a)所示,CMAC模块输出曲线如图8(b)所示.可见电机转速有很小的下降,波动幅度略有增加.
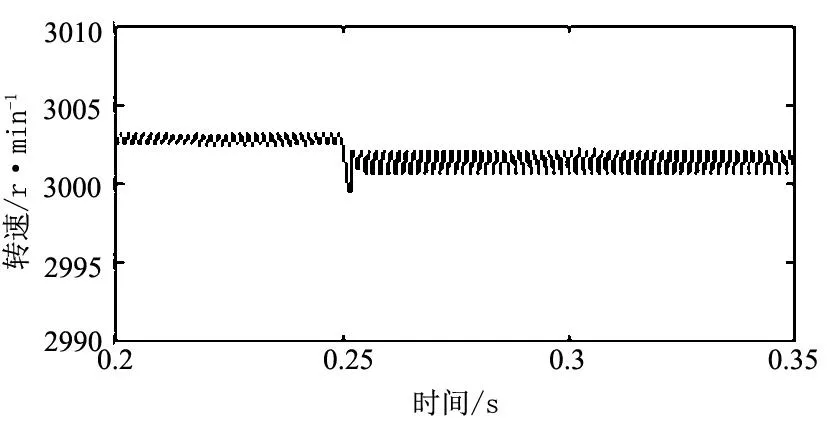
(a)转速仿真曲线
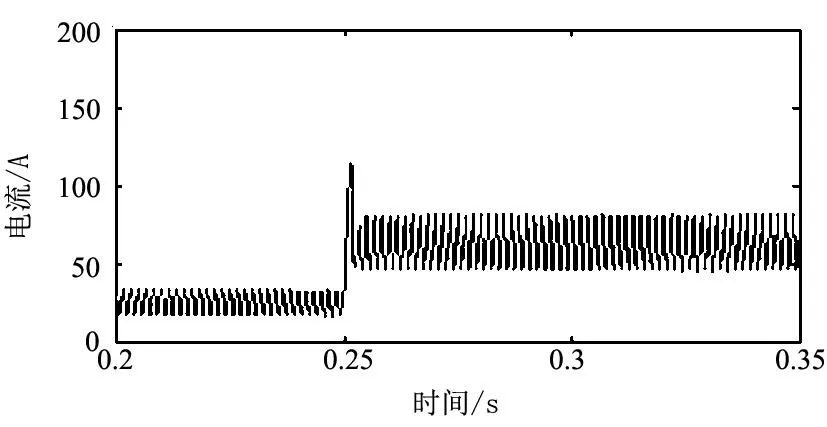
(b)CMAC模块输出曲线图8 突加负载
(6)突卸负载.电机负载转矩20N·m,转速3 000r/min,0.25s时,负载转矩从20N·m减至0,转速仿真曲线如图9(a)所示,CMAC模块输出曲线如图9(b)所示.可见卸去负载后,电机转速有很小的上升,波动范围减小.

(a)转速仿真曲线

(b)CMAC模块输出曲线图9 突卸负载
4 结束语
本文采用CMAC和PID复合控制的方法控制开关磁阻电机的转速.利用CMAC实现前馈控制,利用PID实现反馈控制.利用CMAC输出误差小、实时性好、鲁棒性强的特点,改善常规PID控制的效果,并对CMAC的权值调整算法进行了改进,以更有利于电路实现.通过在Matlab中对电机空载启动、负载启动、设定转速增加、设定转速减少、突加负载、突卸负载等情况进行仿真实验,表明设计的控制系统能够有效地控制电机的转速,效果良好.
参考文献:
[1]崔晓锃,石山,刘志东.基于论域自调整的模糊PID开关磁阻电机控制系统研究[J].微电机, 2012, 45(2): 75-78.
[2]马云龙,章玮.开关磁阻电机的模糊自适应简化控制[J].机电工程, 2014, 31(1): 93-96.
[3]赵影,吴双鹤,刘欢欢,等.开关磁阻电机滑模变结构转矩分配控制[J].组合机床与自动化加工技术, 2013(12): 98-100,104.
[4]王子煜,邓福军.基于自抗扰理论的开关磁阻电动机直接转矩控制[J].电气应用, 2013, 32(24): 105-109.
[5]张振国,徐建科,江涛,等.开关磁阻电机直接转矩模糊控制器设计与仿真[J].计算机仿真, 2012, 29(9): 178-181.
[6]刘金琨.先进PID控制MATLAB仿真[M]. 2版.北京:电子工业出版社, 2004.
(编辑:郝秀清)
SpeedcontrolofswitchedreluctancemotorbasedonimprovedCMACandPID
LINHao,YAOYan-zhi,ZHAOMing-bo
(SchoolofComputerScienceandTechnology,ShandongUniversityofTechnology,Zibo255049,China)
Abstract:Owing to the nonlinear of switched reluctance motor, a conventional linear control method is hard to perform effectively. To solve this problem, weight adjustment algorithm of CMAC(Cerebellar Model Articulation Controller)was improved, and a speed control system based on improved CMAC and PID was designed.It realizedspeed control by chopped current control, realized feedforward control by using CMAC and realized feedback control by using PID. The performanceof conventional PID controlhas been improved by the characteristics of little output error, good real-time and strong robustness of CMAC. The processes of non-load starting, load starting, given speed increase, given speed reduction, step load, and sudden unload were simulated by Matlab. Simulation results demonstratedthat the motor run stably at given speeds.
Key words:CMAC;PID;switched reluctance motor;speed control
中图分类号:TP273; TM352
文献标志码:A
文章编号:1672-6197(2015)04-0040-05
作者简介:林浩, 男, linhaoemail@126.com
收稿日期:2014-10-07
