基于灰色预测-模糊PID的全电动注塑机注射速度控制
2015-12-16崔振华李素玲
崔振华,李素玲
(山东理工大学 电气与电子工程学院,山东 淄博 255049)
基于灰色预测-模糊PID的全电动注塑机注射速度控制
崔振华,李素玲
(山东理工大学 电气与电子工程学院,山东 淄博 255049)
摘要:针对全电动注塑机射胶过程的工作原理和所呈现的随机性、非线性、时变性等特点,提出将灰色预测、模糊控制与常规PID控制相结合的灰色预测模糊PID控制算法,用于全电动注塑机注射速度的控制. 模糊PID控制通过模糊推理对常规PID参数自适应调整实现速度控制.建立注射速度模型,并进行MATLAB仿真.结果表明,采用预测模糊PID的注射速度控制能够获得很好的速度跟踪性、稳定性和抗干扰性,易实现注射速度的分级控制.
关键词:注塑机;灰色预测;模糊控制;PID控制
全电动注塑机的控制比较复杂,不仅具有高阶非线性特点,而且容易受负载扰动的影响.注射速度的高阶非线性使得单纯的预测控制、模糊控制和预测控制很难对注射速度进行跟踪.本文采用灰色预测-模糊PID控制策略[1],从已经发生的系统行为特征中寻找规律,对系统未来的速度变化作出估计,同时实现PID参数在线调整,使注射速度在高负载情况下稳定可靠,能够实时跟踪设定的曲线.
1 全电动注塑机注射过程工作原理
全电动注塑机的注射结构如图1所示.射胶伺服电机通过同步带带动滚珠丝杆运动将旋转运动转化为注射螺杆的直线运动,将积存于机筒前端的熔料注入到模腔中.其结构主要包括由控制器、驱动器、射胶伺服电机和编码器构成驱动部分和由同步带、滚珠丝杆、注射螺杆等组成的传动部分.射胶系统控制原理如图2所示.
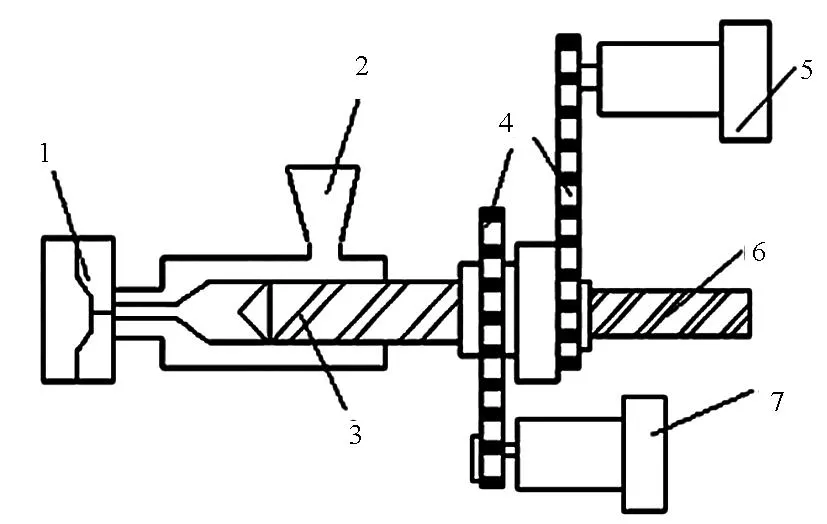
1-模具;2-料斗;3-螺杆;4-皮带;5-射胶伺服电机;6-螺杆前后进用滚珠丝杆; 7-熔胶伺服电机 图1 全电动注塑机注射结构图

图2 注射系统的控制原理图
注射过程中,螺杆在电机的带动下向前移动,将存于料筒中的熔物注射到模腔.当控制器接收上位机设定的位置参数命令后调用射胶速度子函数,计算出目标曲线对应的电机转速,并给出控制信号到驱动器.驱动器采用矢量控制算法驱动射胶伺服电机,并根据编码器的反馈跟踪设定的目标速度曲线.注射到一定时间时,模腔被填满,压力将逐渐增大.为防止回流,螺杆需要继续保持一定压力,此时进入保压阶段.
注射速度、模腔压力通过控制裸官的转速来控制,因此只有对射胶电机的转速实施精确控制才能完成注射过程的准确控制.
2 控制方案及模型建立
2.1注射速度的数学模型
注射速度的控制比较复杂,国内外学者对此做了大量的研究.Tan K.K通过迭代学习整定PI参数,但在参数发生突变时收敛速度较慢[2].崔采莲采用离散预期学习的方法对注射速度变量进行控制,将其假设成一个单输入单输出线性不变模型,与实际相差较大[3].文献[4]给出一个四阶线性模型,本文在这个模型的基础上设计控制方法,该模型的传递函数为
(1)
2.2最优注射速度曲线
在注塑机生产过程中,浇口和模具界面上各点的注射室是不均匀的.目前最广泛的注射方法是分级注射,根据射胶过程中不同阶段设定不同的注射速度.如图3所示为典型的最优注射曲线.

图3 最优注射曲线
第1阶段,为了缩短填充时间,熔胶以较高速度填满注射流道,后期保持稳定;第2阶段,当熔胶通过模腔口时为防止喷射并且消除浇道口的放射纹,注射速度下降;第3、4阶段,为使熔融物迅速填满模腔增大速度并保持在较大值;第5阶段,为了防止过充填和飞边现象,迅速降低注射速度[5].
2.3灰色预测系统
灰色系统(Grey System)是指内部信息不完全的系统,通常采用的灰色系统GM(1,1)[6]模型实际输出的离散值进行预测,而不需要掌握被控对象模型结构的先验信息,计算量少,需要的原始数据也少,仅需辨识两个参数.灰色预测的超前步数可以根据被控对象进行调整,控制过程中参数不断进行辨识和修正,很适于系统过程的预测控制.
灰色模型(Grey Moder)简称GM模型,是灰色系统的基本模型,以灰色模块为基础,根据关联度、生成数的灰导数及微分等观点,以微分拟合法而建立的模型.
系统的输入输出数据时间序列为
u(0)(1),u(0)(2),…,u(0)(n);
y(0)(1),y(0)(2),…,y(0)(n)(n≥4)
对其进行累加,弱化随机干扰影响得到累加数列

(2)
GM(1,1)的白化方程为

(3)
根据公式(2),y(1)(t)在k时刻的解为
(4)
根据公式(3)进行(k+M)时刻预测,对累加后的数据进行还原得原始数据对(k+M)时刻的预测,GM(1,1)模型长期预测的有效性受时间序列的长短和数据变化的影响,不能太短也不能太长,只有选取合适的建模维数和预测步长,才能够准确预测系统行为的发展变化,本系统选取建模维数为6,预测步长为1.
2.4模糊PID控制系统
常规PID控制器的算法可表示为
(5)
式中,u(k)为控制信号;kp、ki、kd分别为比例、积分、微分系数;E(k)为误差;EC(k)为误差变化率.
在模糊PID控制中,以被控系统的输入与反馈的误差作为模糊控制器的输入E,以误差变化率作为输入EC,通过模糊推理在运行过程中根据实际工况实时在线调整kp、ki、kd使得控制参数在任意时刻最优.
误差、误差变化率的整数论域均为[-6,+6];输出变量为PID控制器的比例、积分、微分系数.调整增量的模糊集均为{NB,NM,NS,ZO,PS,PM,PB},输出控制信号的论域为[-3,+3].kp、ki、kd为输出变量,模糊子集取为{NB,NM,NS,ZO,PS,PM,PB},模糊变量的模糊子集均选为高斯型,建立模糊规则隶属度函数如图4所示.

图4 E和EC的隶属度函数
根据上述PID控制原则及工程技术人员操作经验,制定参数调整模糊控制规则表见表1、2、3.
注塑机的速度受到背压、材料性质、熔体温度、喷嘴压力和模具腔几何形状等因素影响,注射速度会随时间发生变化,因此存在时变性、死区非线性和耦合等问题.预测模糊PID控制[7]以PID控制器作为基础单元,以模糊控制解决系统的时变性、死区非线性等问题,预测控制解决各系统之间的耦合问题.
表1Δkp的模糊规则表
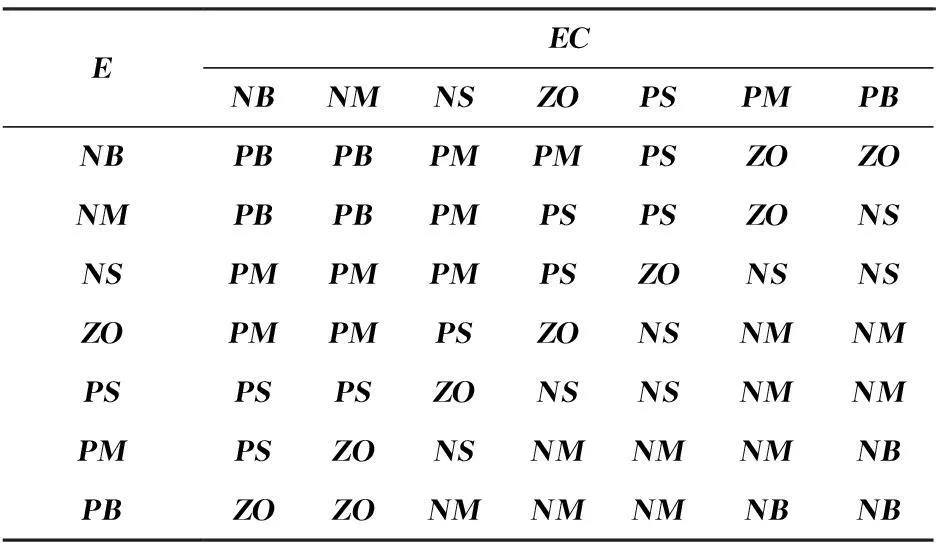
EECNBNMNSZOPSPMPBNBPBPBPMPMPSZOZONMPBPBPMPSPSZONSNSPMPMPMPSZONSNSZOPMPMPSZONSNMNMPSPSPSZONSNSNMNMPMPSZONSNMNMNMNBPBZOZONMNMNMNBNB
表2Δki的模糊规则表

EECENBNMNSZOPSPMPBNBNBNBNMNMNSZOZONMNBNBNMNSNSZOZONSNBNMNSNSZOPSPDZONMNMNSZOPSPMPMPSNMNSZOPSPSPMPBPMZOZOPSPSPMPBPBPBZOZOPSPMPMPBPB
表3Δkd的模糊规则表

EECNBNMNSZOPSPMPBNBPSNSNBNBNBNMPSNMPSNSNBNMNSNSZONSZONSNMNMNSNSZOZOZONSNSNSNSNSZOPSZOZOZOZOZOZOZOPMPBNSPSPSPSPSPBPBPBPMPMPMPSPSPB
3 灰色预测模糊PID控制器及仿真
将全电动注塑机注射速度的预测模型、模糊规则和隶属函数输入到Matlab的模糊控制器中,根据注射速度模型在Simulink中建立注射速度调节器的灰色预测模糊PID模型[8],其控制系统仿真如图5所示.

图5 注射速度的灰色预测模糊PID控制原理模型

图6 控制系统仿真图
根据在Simulink中设计的灰色预测模糊PID控制仿真图以及Maltlab仿真程序,对全电动注塑机的注射速度系统进行仿真,并与传统的PID控制、模糊PID控制进行比较,结果如图6所示.三种控制方式性能指标见表4.
表4三种控制方式性能指标

控制方式上升时间/s超调量/%调节时间/s传统PID0.05210.28模糊PID0.1700.09预测模糊PID0.1000.04
根据图6以及表4比较可以看出,PID控制器起始阶段响应速度快,但稳定性差,总体响应速度较慢,跟踪性能差;模糊PID控制器具有较好的稳定性,但是存在滞后问题,总体快速性较差,因此跟踪性能也一般;而灰色预测模糊PID控制具有很好的稳定性,总体快速性好,因此系统性能稳定,具有很好的跟踪性.
注塑机在实际的工业生产中有很多的外界干扰因素,用脉冲信号模拟系统出现的干扰,来检测注射速度系统的性能.假设注塑机注射系统在0.6s处出现了幅值为0.05的脉冲干扰信号,这将会影响到系统的输出,将仿真曲线受扰动后局部放大查看结果,如图7所示.表5为三种控制方式的误差参数.
表5三种控制方式误差参数

控制方式最大误差出现时间/s最大误差/s恢复稳定时间/s传统PID0.6030.0480.20模糊PID0.6020.0350.06预测模糊PID0.6010.0180.01

图7 加入干扰时控制系统的仿真曲线
分析图6和表5可以看出,当注射系统出现扰动时,三种控制器的输出响应的性能是不同的,传统PID的控制误差最大,恢复时间最长;模糊PID控制的误差较小,恢复时间较短;灰色预测模糊PID控制下的误差最小,而恢复到稳定的时间也最短.
控制效果如图8所示,能够较好的跟踪设定的最优注射曲线.

图8 控制效果图
4 结论
(1)灰色预测模糊PID控制在注塑机的注射快速性和跟踪性能方面都优于传统的PID控制和模糊PID控制,秉承了传统PID控制、灰色预测控制和模糊控制的优点,并克服了他们各自存在的缺点.
当外界出现干扰时,具有更好的鲁棒性,适用于非线性、强干扰的不确定复杂系统.
(3)系统能够很好的跟踪分级注射的最优曲线,实现了注塑机的分级控制.
参考文献:
[1]姬江涛,王荣先,符丽君.联合收获机喂入量灰色预测模糊PID控制[J].农业机械学报,2011,39(3): 63-6.
[2]徐锐.全电动注塑机熔胶和射胶过程控制及其伺服电动机控制研究[D].太原:华南理工大学,2010.
[3]崔采莲,孙明轩.注塑机注射速度的离散预期学习控制[J].机械工程学报,2007.43(6):41-47.
[4]HuY,ZhangY,CuiP.Adaptivebacksteppingcontrolforaclassofstrictfeedbacknonlinearsystemsusingradialbasisneuralnetwork[C]//Proceedingsofthe4thWorldCongressonIntelligentControlandAutomation.Shanghai, 2012: 3 022-3 026.
[5]赵松,张培仁,邓超.注塑机注射速度的模糊控制及其仿真[J],系统仿真学报,2008,20(2):349-352.
[6]胡建斌.基于非线性回归预测及迭代学习的注射速度控制[D].沈阳:东北大学,2010.
[7]杨成晨,张九根.基于灰色预测模糊PID算法的空调房间温度控制[J].电子技术应用,2012,38(4):56-59.
[8]苏杰.核动力装置多变量模糊预测控制仿真研究[J].原子能科学技术,2012,46(10):1243-1248.
(责任编辑:刘宝江)
Speed control of the all electric injection molding
machine based on the grey prediction fuzzy PID
CUI Zhen-hua, LI Su-ling
(School of Electrical and Electronic Engineering, Shandong University of Technology, Zibo 255049, China)
Abstract:According to the working principle of full electric injection molding machine injection process and presents the stochastic, nonlinear and time-varying, we put forward the grey forecasting, grey forecasting control fuzzy control and conventional PID combining the fuzzy P control algorithm of ID, used to control the injection speed of the all electric injection molding machine. Fuzzy PID control by fuzzy reasoning to realize the speed control of the conventional PID parameters are adjusted and the injection velocity model is established, and simulated by MATLAB. Results show that the prediction using the injection speed fuzzy PID control can obtain good speed tracking performance, stability and anti-jamming, easy to realize grading injection speed control.
Key words:injection molding machine; grey prediction; fuzzy control; PID control
中图分类号:
文献标志码:A
文章编号:1672-6197(2015)04-0031-04
通信作者:
作者简介:崔振华,男, zhenhua563@vip.qq.com; 李素玲,女,lsl608@163.com.
收稿日期:2014-10-22
