Pioneer 3机器人在基础教育技术课程研究性 学习中的应用
2015-12-08黄捷
黄 捷
(1.福建教育学院,福建 福州 350025;2.北京理工大学自动化学院,北京 100081;3.格罗宁根大学数学与自然科学学院,荷兰 格罗宁根 9747AG)1
Pioneer 3机器人在基础教育技术课程研究性 学习中的应用
黄 捷1,2,3
(1.福建教育学院,福建 福州 350025;2.北京理工大学自动化学院,北京 100081;3.格罗宁根大学数学与自然科学学院,荷兰 格罗宁根 9747AG)1
文章研究机器人教育在基础教育技术课程研究性学习中的应用,培养学生控制与设计和计算机编程的综合能力。首先简要介绍了Pioneer 3机器人的体系结构及相关软件特点,然后以机器人路径规划及控制这一开放性问题开展研究性学习活动,并给出了问题的解决方案。
Pioneer 3机器人;通用技术;信息技术;技术课程;控制与设计
技术教育是基础教育中重要的组成部分,“通用技术”与“信息技术”构成了我国基础教育阶段的技术课程体系。机器人控制综合了控制技术、电子技术、信息技术、机构设计和系统工程等多方面的知识,因此教育机器人是通用技术和信息技术研究性学习的一个良好的载体[1]。目前在基础教育阶段机器人教育中常采用乐高等简易机器人开展机器人教学活动,但是这类机器人不能实现复杂的功能,更难以称之为“智能机器人”。而Pioneer机器人,作为面向教学和科研的机器人研究和实验平台,可以实现较复杂的机器人控制实验,现广泛用于全球各大高等院校和研究所。由于Pioneer机器人平台的先进性,对使用者的综合素质有较高的要求,目前我国基础教育阶段的学校少有采用此平台。近几年,如何开展“研究性学习”在我国教育学界中得到广泛的讨论[2-6]。简而言之,作为一种学习方式,“研究性学习”是指教师或其他指导者不把现成结论告诉学生,而是学生在教师引导下,基于某个问题框架,自主发现问题、探究问题、获得结论的过程[3]。“研究性学习”是渗透于多种学科并且在研究性活动之中获得知识的一种学习方式。
本文研究Pioneer 3机器人在基础教育技术课程研究性学习中的应用,设计出一个适合基础教育阶段学生和教师开展研究性活动的开放性机器人控制课题,并给出解决方案。本文主要创新在于:发挥Pioneer3机器人模块化设计及平台易用性的特点,探索它在基础教育阶段技术课程的研究性教学中的应用的可行性,以机器人路径规划及其运动控制作为主要研究内容,使其可作为于通用技术 “控制与设计”和信息技术“程序设计”的研究性学习载体。
一、教学目标
利用Pioneer3机器人开展技术教育研究性学习的目标是:在机器人运动控制的研究性教学活动中,促进学生掌握控制理论的基本概念、计算机编程能力以及团队合作能力。“控制与设计”是通用技术《技术与设计2》中重要的章节,是学生认识基本自动控制原理的入门内容。加强“控制与设计”的课程教学,丰富教学内容,不断改进教学方案是十分必要的。此外,信息技术重点在于培养学生的编程的逻辑思维和计算机程序代码的编写能力。Pioneer3机器人是上述教学内容良好的研究平台。
二、教学内容和开放性问题设计
本研究性学习以机器人全区域覆盖运动控制作为内容开展研究。首先需要学习Pioneer3机器人平台的软硬件,其次研究单机器人区域覆盖控制问题,然后进一步研究多机器人协同区域覆盖控制。其中,如何使用Pioneer3机器人软硬件平台作为入门知识以教师讲授为主;机器人的区域覆盖路径规划和控制问题主要以研究性教学的形式和过程中完成。
(一)学习Pioneer3机器人的硬件平台
Pioneer3机器人是美国ActivMedia公司推出的一款轮式移动机器人,它带有机载PC机,是一个可以实现完全自主运动的智能移动机器人。它的结构尺寸为:长50cm、宽49cm、高26cm、重9kg,轮子直径为21.5cm。先锋机器人由以下几个主要部件组成:(1)顶板;(2)紧急停车按钮;(3)用户控制面板;(4)机身、鼻部、附件面板;(5)声纳;(6)电动机、车轮、编码器;(7)电池和电源。[7]除了上述固定的硬件配置之外,每个Pioneer机器人都有许多扩展组件,包括内置硬件支持的声纳、碰撞感知器和提升/钳子受动器,以及传感器、受动器和控制附件的串口和服务器软件支持等,例如机载PC机系统、自动入坞/充电系统、激光测距、多自由度机械手臂、平面倾斜相机等等,还可外接笔记本电脑作为Pioneer机器人的控制器。
(二)学习Pioneer3机器人的软件平台
控制Pionee3机器人需要多种软件配合使用,这部分授课以教师讲授的方式为主,通过集中授课的方式讲授软件的基本使用方法,学生在研究性活动过程中再逐步摸索、学习和提高。相关的软件主要包含微软Visual Studio.NET编程语言、Mobi leRobots公司的机器人应用接口程序ARIA、ActiveMedia公司的机器人运动仿真软件MobileSim和地图绘制软件Mpper3。
1.Microsof t Visual Studio.NET
Visual Studio.NET是微软推出一款基于.net架构的开发工具。该架构将强大功能与新技术结合起来,用于构建具有视觉上引人注目的应用程序。
2.ARIA
ARIA是Mobi leRobots公司推出的用于先锋机器人控制的应用程序接口。它提供了到各种智能机器人系统的可靠客户端接口,包括机器人的控制器和附件系统。开发人员通过ARIA可以有效管理机器人的高层行为和资源。该软件具有强大的功能和适应性,Pioneer机器人基本软件系统都是以ARIA为基础的。
3.Mobi leSim
MobileSim是ActiveMedia公司Pioneer系列机器人的仿真软件,包含了机器人的运动控制模型、声纳和激光传感器模型、通讯模型,以及周围环境模型,可以加载地图,获取传感器数据信息,可提供实际机器人的绝大多数功能。用户编写的代码可先在Mobi leSim上运行,在Mobi leSim上的仿真结果与机器人在实际环境中运动的效果是接近的,若调试成功,再将代码传送到机器人实物平台上做进一步的调试和运行。
4.Mapper
Mapper是地图绘制软件,可以自动生成地图或者手工绘制地图。自动生成地图时,它需要和机器人平台上的激光测距仪获取的环境信息图。Mobi leSim可以利用Mapper生成的环境地图。教师和学生可以利用Mapper生成虚拟的地图环境用于机器人的模拟控制。
(三)机器人控制开放性问题的设计和解决方案
1.机器人区域覆盖控制问题
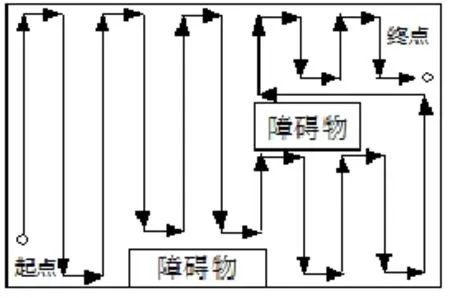
研究性学习,通常需要开发一个主题或者开放性问题为学习过程的载体。针对“控制与设计”和“计算机程序设计”教学的综合需要,设计移动机器人路径规划下的控制问题作为研究活动的载体。路径规划它是按照某种优化指标,在起始点和目标点之间规划出一条与环境障碍物无碰撞的最优路径,其中机器人工作地图环境信息可以是给定的也可以是同步定位和地图构建(SLAM)。考虑到中学生和教师的知识和技能水平和学生的学习能力。为了降低研究和实验的难度,本案例中建议采用给定地图的方式,地图可以根据实验环境的情况通过Mapper构建出来。在移动机器人路径规划中,全区域覆盖路径规划是比较典型的规划任务,它在满足某种性能评价指标最优的前提下寻找一条在设定区域内从始点到终点且经过所有可达点的路径规划,其特点是在地图全区域内完全遍历路径,如图1所示。这种路径规划广泛应用于排雷机器人、扫地机器人、割草机器人和水下机器人污染监测等应用领域。
2.机器人区域覆盖控制的方法
为了解决机器人区域覆盖控制问题,首先将全区域覆盖路径规划描述为[8,9]:
设机器人的运动范围S={x,y|x,y为某闭合曲线所包围的点}。
如果将在平面上运动的Pioneer3机器人看做是运动的质点,那么全区域覆盖就是该运动质点能够连续移动且经过可达区域中所有点的一条连续路径,称该路径为可行遍历轨迹。显然,可行的遍历轨迹不止一条。所有可行遍历轨迹可以由下式表示:

进一步,可以采用多台机器人同时参与遍历,难点在于对不同的机器人如何分别划分工作区域。在具体的实验室环境中,在地图中间放置4个障碍物,同时构建虚拟地图边界,五台Pioneer机器人完成壁障和遍历,如图2所示。

图2 五台Pioneer机器人编队壁障和遍历实验图
三、教学模式
本课程既有面对面的讲授式教学,又有学生以小组为单位的研究性学习活动,从某种意义上属于混合式学习模式。在研究性活动中,应该注意突出学生的主体地位,让学生在教师的引领下主动去寻求知识。每个研究小组选出一名组长,负责任务分工以及问题寻解过程中的整体把握。需要值得注意的是,指导教师应在组长选举阶段给予必要的引导,选择小组中学习主动、有充足时间、有充分兴趣、有组织能力和合作学习经验的组员担任组长,同时加强组长与指导教师之间的联系。
通过授课式教学,使得学生快速地初步掌握Visual Studio.NET、ARIA、Mobi leSim和Mapper等软件的使用和计算机编程能力;在研究性教学中,通过机器人路径规划和运动控制来掌握系统工程、控制和设计的学习内容。学生针对机器人全区域覆盖问题,通过研究选择合适的路径规划,并根据所选择的规划方法,通过小组合作的方法用上述计算机编程工具分别进行程序设计。完成地图信息构建,将地图信息导入仿真平台,编写机器人控制器程序。此外还需注意难易度的掌握,提供Pioneer3机器人控制主要程序代码,降低学生学习难度。
四、评价
应加强对研究性学习过程的评价。而不是只作最后的总结性评价。可从开题(选题与定题)、实施过程以及结题三个阶段,按照不同权重对着三个学习过程分别给予评价。其中开题和结题以报告的形式体现,实施过程阶段应该注重个人在小组活动中的表现,注重突出个人贡献在总分中所占的比例,以此来评定学生成绩等次。
五、结论
本文提出一种可行的开放性问题的设计和解决方案。本文研究如何把pioneer3这个相对于基础教育来说比较高级的机器人平台引入基础教育,其难点在于,由于Pioneer3机器人的控制需要较为高深的软硬件知识,这对中学教师和学生来说难度很大,因此将Pioneer3机器人应用到基础教育技术课程研究性学习具有一定新颖性和挑战性。本文通过引入机器人全区域覆盖控制这个开放性问题,在课题的设计和实施方面尽可能降低学习难度,使得这个平台能在基础教育研究性课程学习中应用。本文的研究内容可用于培养学生综合的技术素养,推动通用技术和信息技术的教学。
[1]黄捷,丛敏.教育机器人的界定及其关键技术研究[J].中学理科园地,2013(6).
[2]吴薇,王竹立.大学生是如何协作探究的——大学通识课程研究性学习的叙事研究[J].开放教育研究,2012(6).
[3]张华.论“研究性学习”课程的本质[J].教育发展研究,2001(5).
[4]卢晓旭,赵媛,陆玉麒,等.我国基础教育研究性学习开展水平的省际差异分析[J].上海教育科研, 2011(2).
[5]龙慧灵,熊黎,龙海明.论研究性教学与研究性学习[J].社会科学家,2010(8).
[6]耿红卫.研究性学习的误区,成因及实施建议[J].河北师范大学学报(教育科学版),2012(4).
[7]Download Pioneer 3-AT Datasheet [EB/OL]. [2014-08-14].http://www.activmedia.com/.
[8]李开生,张慧慧,费仁元,等.具有遍历特性的移动机器人规划方法的研究[J].机器人,2001(6).
[9]张佳,陈杰,窦丽华.基于路径规划的智能机器人控制实验[J].实验技术与管理,2011(12).
G42
A
1673-9884(2015)01-0080-04
2014-10-20
福建教育学院重大科研课题(2014ZD-06);福建省中青年教师教育科研项目(JB13442S)
黄捷(1983- ),男,福建福清人,福建教育学院讲师,博士研究生。
