并联式混合动力汽车再生制动控制策略
2013-10-15孙鹏龙付主木王周忠
孙鹏龙,付主木,王周忠
(1.河南科技大学电子信息工程学院,河南洛阳471023;2.96518部队,湖南怀化418000)
0 引言
混合动力汽车再生制动是指在制动时将汽车的惯性能量通过传动系统传递给电机,电机以发电方式工作并向电池充电,从而实现能量的转换与回收,同时电机处于发电运行状态,其发电转矩通过传动系统向车轮提供整车的部分或全部制动力。通过再生制动能够显著降低机械制动器的磨损,同时改善汽车的燃油经济性,减少排放[1-2]。
目前,国内外对混合动力汽车再生制动的研究已经逐步展开,并取得了许多理论成果[3-7]。文献[8]提出了基于理想制动力分布曲线、最大化制动能量回收和固定比例分配的3种控制策略;文献[9]提出了基于理想制动力分布曲线的无级变速器(CVT)混合动力汽车再生制动控制策略,制动性能出色,但要求传动系统必须装备有CVT。基于此,本文结合国内外再生制动的研究成果,设计了一种最大化制动能量回收的并联式混合动力汽车(PHEV)再生制动控制策略,能够在满足稳定性的前提下将制动能量尽可能多地分配给再生制动系统。
1 制动系统结构与制动原理
本文以双轴式前驱型PHEV为研究对象,其制动系统的结构如图1所示。
汽车在平坦的路面制动时,所受到的总阻力为:
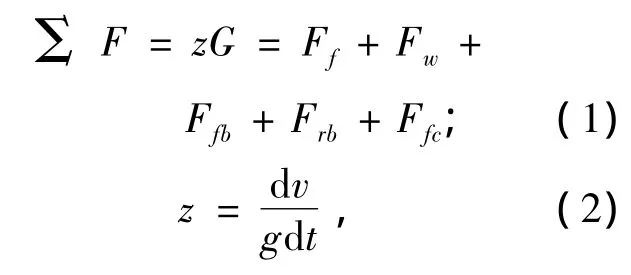
式中,z为制动强度;G为整车重力;v为车速;g为重力加速度;Ff为滚动阻力;Fw为空气阻力;Ffb为前轮制动力;Frb为后轮制动力;Ffc为发动机反拖制动力。
当驾驶员踩下制动踏板时,车轮需要提供的制动力为:

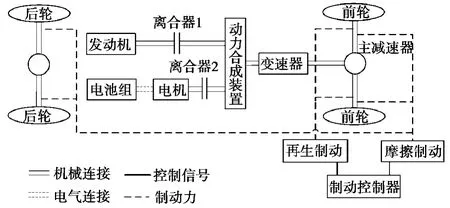
图1 制动系统结构示意图
式中,Fre为车辆总制动力。
作用于前后轮上的铅垂方向的载荷Wf和Wr分别为:

式中,L为轴距;La为前轴到重心的距离;Lb为后轴到重心的距离;hg为重心高度。
对于附着因数为φ的路面,车轮与地面间存在最大制动力,当达到最大制动力时,即使制动转矩继续增大,制动力仍保持不变,车轮将抱死。即

式中,Fb为车轮与地面间的制动力;W为车轮铅垂方向上的载荷。
2 再生制动控制策略
对于前驱型PHEV,其再生制动控制策略的任务是:(Ⅰ)分配前后轮制动力;(Ⅱ)分配前轮摩擦制动力与再生制动力。其中,前后轮制动力的分配影响汽车制动稳定性;前轮摩擦制动力与再生制动力的分配决定可回收制动能量的多少。
在制动过程中,当车速很低时,发电机所输出的功率相当小,加上充电过程中的损耗,最终充给电池的能量几乎没有,此时只进行机械摩擦制动;当制动强度z>0.7时,为紧急刹车情况,只进行摩擦制动;当电池荷电状态(SOC)值大于0.8时,只需进行摩擦制动。
2.1 制动稳定区间
当前后轮同时抱死拖滑时,前后轮都获得最大制动力,制动距离和制动时间最短,制动效果最佳,此时作用于前后轮上的制动力分布曲线为理想制动力分布曲线,称为I曲线[10-12],用公式表示为:

对于前驱型PHEV,再生制动力由前轮提供,为了尽可能多地回收制动能量,前轮将承担大部分制动力,实际制动力分布点位于I曲线下方。
当后轮首先抱死时,后轮滑移率为1,车辆将丧失方向的稳定性,易出现甩尾或者侧滑。当前轮首先抱死时,前轮滑移率为1,将引发方向失控,驾驶员不能行使有效地操作,然而制动住前轮不会引起方向上的不稳定性。对于前驱型PHEV,前轮易发生抱死,当后轮抱死而前轮未抱死时,随着不同的附着因数φ,所画出的前后轮制动力分布曲线簇称为f线组,公式为:

根据联合国欧洲经济委员会汽车法规(ECE),z处于0.15到0.80之间时,后轮附着系数利用曲线不能位于前轮上方,当φ在0.20到0.80之间时,有z≥0.1+0.85(φ-0.2)。满足ECE制动法规的前后轮制动力分布曲线称为ECE规程曲线,它限定了制动时后轮最小制动力。用公式表示为:

由I曲线、f线组、ECE规程曲线共同包围的区域为稳定制动区间,汽车在制动过程中前后轮制动力分布点不能超出此区间。
2.2 前后轮制动力控制策略
不同路面附着系数的前后轮制动力分配关系如图2所示。为了最大限度地回收制动能量,需要在制动稳定区间内将制动力尽可能多地分配给前轮。
(Ⅰ)当φ≤φ0时,对应的附着因数为φ1,f线为f1,如图2所示,此时OBC为稳定制动区间。
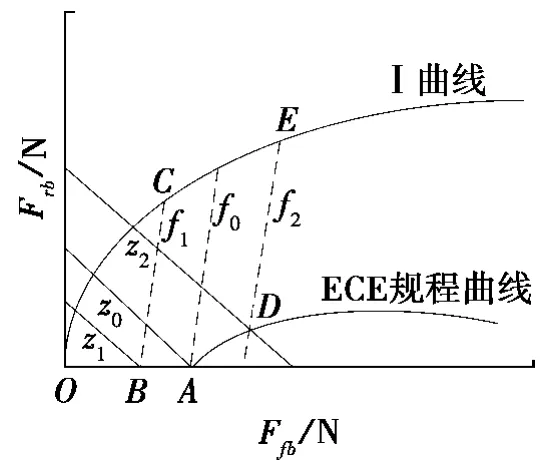
图2 不同路面附着因数的前后轮制动力分配图
当z≤z1时,制动力全部由前轮提供,后轮不参与制动,即前轮制动力Ffb和后轮制动力Frb分别为:

当z>z1时,前后轮同时进行制动,前后轮制动力沿BC线分布,即

(Ⅱ)当φ>φ0时,对应的附着因数为φ2,f线为f2,如图2所示,此时OADE为稳定制动区间。
当z≤z0时,只进行前轮制动,即

当z0<z≤z2时,前后轮同时进行制动,前后轮制动力沿AD线分布,即

当z>z2时,前后轮同时进行制动,前后轮制动力沿DE线分布,即
2.3 前轮摩擦制动力与再生制动力控制策略

再生制动受电池充电功率和电机发电功率的限制。不考虑电池温度、使用次数等影响,电池的最大充电功率是自变量为SOC的函数,初始SOC值越小,充电功率越大。即

式中,Pem为电池最大充电功率。
设当前车轮转速为nw,主减速器的传动比为i0,根据变速器的档位可以得到变速器的传动比为i1,则发电机的转速nm为:

发电机在基速以下为恒转矩输出,基速以上为恒功率输出。对应某一转速nm,通过发电机外特性实验数据查表得到对应的最大发电功率为Pmc,考虑发电机的运行效率ηm,则发电机的最大输出功率Pmm为:

发电机的输出功率不能超过电池所允许的最大充电功率,则发电机的实际最大再生制动功率Pmb为:

由此可以计算出再生制动系统在前轮所能提供的最大再生制动功率Pmd、最大再生制动力Fmd分别为:

式中,η0为传动系统效率;rw为轮胎半径。
(Ⅰ)当Ffb≤Fmd时,前轮制动力可全部由再生制动系统提供,即前轮再生制动力Ffd和前轮摩擦制动力Fff分别为:

(Ⅱ)当Ffb>Fmd时,再生制动系统不足以提供全部的前轮制动力,需要摩擦制动力参与,即

3 仿真及对比分析
ADVISOR自带的再生制动控制策略是根据车速查表得到前轮摩擦制动力分配系数和前轮再生制动力分配系数,因而是一种固定制动力分配比例的控制策略,整车仿真模型如图3所示。根据本文所设计的制动力分配算法,修改控制模块<vc>par中的前向制动模块和后向制动模块,结合ARB02路况分别对所设计PHEV再生制动控制策略和原有的固定制动力分配比例的再生制动控制策略进行仿真。路面附着因数为0.7,电池SOC初值设为0.7。

图3 整车仿真模型
整车和各主要部件的参数见表1。
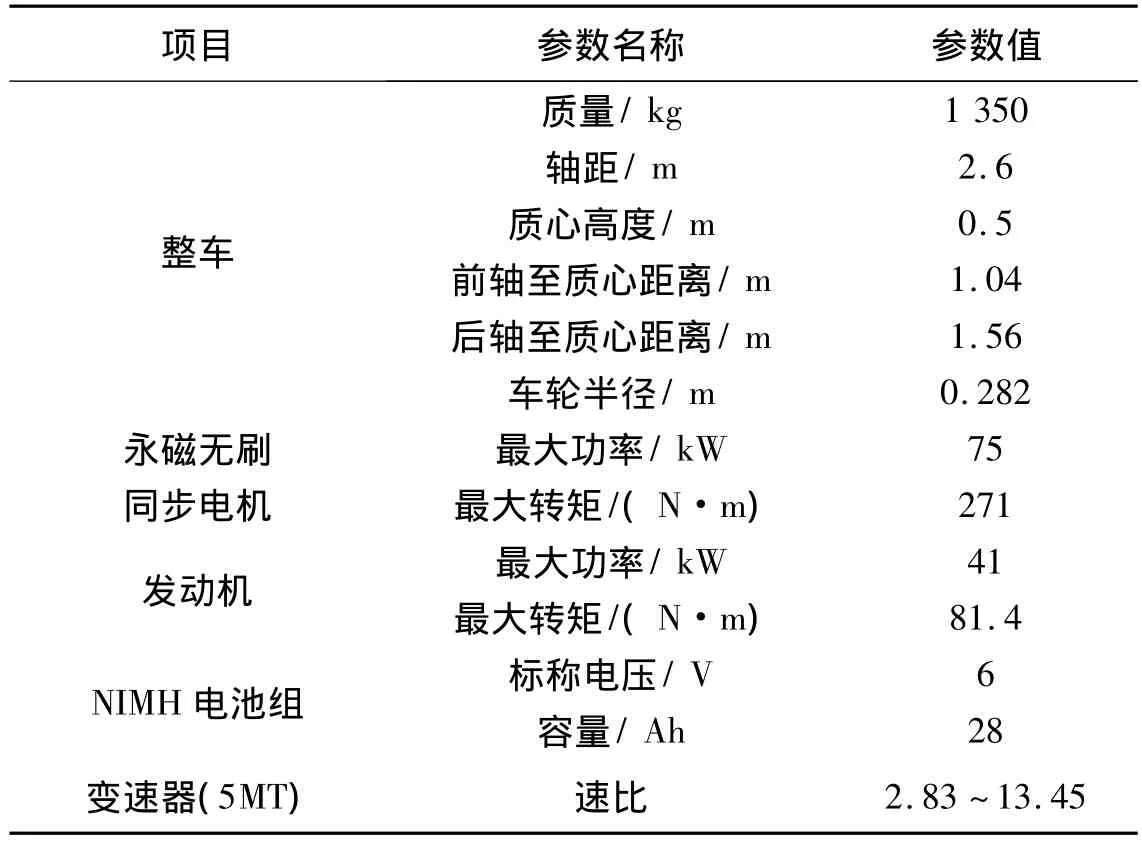
表1 整车和主要部件参数
两种控制策略下的电池SOC变化曲线如图4所示,图4a为最大化制动能量回收的再生制动控制策略下的SOC变化曲线,图4b为固定制动力分配比例的再生制动控制策略下的SOC变化曲线。从图4中可以看出:前者的SOC值比后者高,并且波动更明显,说明本文所设计的再生制动控制策略能够更大程度地回收制动能量。
仿真结果对比数据如表2所示。对比结果证明本文所设计的再生制动策略能够显著提高制动能量回收率,并有效地降低油耗和CO排放。
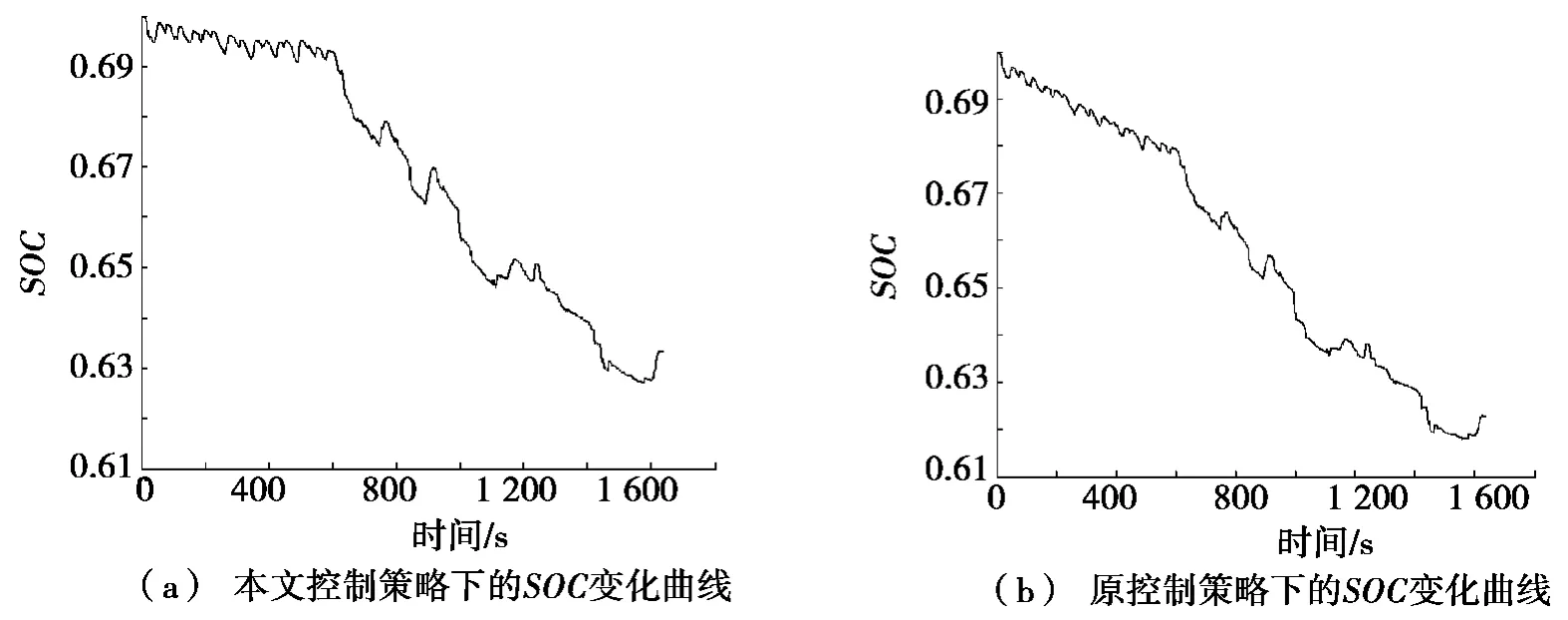
图4 SOC变化曲线

表2 仿真结果对比
4 结论
通过对混合动力汽车进行制动动力学分析,从理论上确定了车辆制动稳定区间。在满足制动稳定性的前提下,设计了最大化制动能量回收的PHEV再生制动控制策略。仿真结果表明:与原固定制动力分配比例控制策略相比,燃油经济性提高了4.7%,制动能量回收率提高了22.8%,CO排放量降低了4.4%,验证了本文所提出的再生制动控制策略的有效性。
[1]Ho T,Ahn K.Design and Control of a Closed-loop Hydraulic Energy-regenerative System[J].Automation in Construction,2012,22:444-458.
[2]Clarke P,Muneer T,Cullinane K.Cutting Vehicle Emissions With Regenerative Braking[J].Transportation Research Part D:Transport and Environment,2010,15(3):160-167.
[3]Ki D,Kim H.Vehicle Stability Control with Regenerative Braking and Electronic Brake Force Distribution for a Four-wheel Drive Hybrid Electric Vehicle[J].Journal of Automobile Engineering,2006,220(6):683-693.
[4]Yeo H,Hwang S,Kim H.Regenerative Braking Algorithm for a Hybrid Electric Vehicle with CVT Ratio Control[J].Journal of Automobile Engineering,2006,220(11):1589-1600.
[5]Tur O,Ustun O,Tuncay R N.An Introduction to Regenerative Braking of Electric Vehicles as Anti-lock Braking System[C]//Proc of the IEEE Intelligent Vehicles Symposium.2007:944-948.
[6]盖刘辉,王伟达,何娇,等.基于模糊控制的混合动力电动车再生制动系统的建模与仿真[J].汽车工程,2012,34(1):51-56.
[7]何仁,陈庆樟.汽车制动能量再生系统制动力分配研究[J].兵工学报,2009,30(2):205-208.
[8]Gao Y,Ehsani M.Electronic Braking System of EV and HEV-integration of Regenerative Braking,Automatic Braking Force Control and ABS[C]//SAE Technical Paper.2001.
[9]秦大同,谭强俊,杨阳,等.CVT混合动力汽车再生制动控制策略与仿真分析[J].汽车工程,2007,29(3):220-225.
[10]李国斐,林逸,何洪文.电动汽车再生制动控制策略研究[J].北京理工大学学报,2009,29(6):520-524.
[11]高建平,李晓林,郭志军.改进型混合动力汽车工况预测算法的应用仿真[J].河南科技大学学报:自然科学版,2013,34(2):34-38.
[12]李忠利,王喜明,高建平,等.混合动力汽车动力系统工况匹配法研究[J].河南科技大学学报:自然科学版,2010,31(5):24-28.
