板簧搬运机械手轨迹规划研究
2012-07-23姜倩倩李素玲陈大伟
姜倩倩,李素玲,陈大伟
(山东理工大学电气与电子工程学院,山东淄博255091)
汽车板簧一般质量都比较大,国内用于汽车板簧搬运的多是人工搬运或者是横梁式的平面搬运机械手.人工搬运劳动强度大,效率低;而平面机械手在一定程度上又显得不够灵活,作业精确度与作业效率较低,为此设计了一种五轴驱动的关节型机械手,能够准确、快速地完成板簧搬运.
机械手轨迹规划是机械手运动控制中的一项核心工作,它直接影响着控制的准确性和快速性.为了保证机械手能够高速、平稳的到达指定位置,提高整个机械手系统的稳定性和可靠性,在操作机械手之前对其进行轨迹规划,就会避免机械手位置、速度、加速度实变等不良现象发生.
1 机械手的系统组成
机械手的自由度数目应与所要完成的任务相匹配,本系统中,为了使板簧搬运机械手能在空间中完成搬运任务,将其自由度数目定为5个,即此搬运机械手有五个关节:腰部、肩关节、肘关节上分别有一个转动关节,可实现机械手的旋转、升降、摆动;末端上的自由度数目为2,有两个转动关节分别可以使腕部俯仰、手爪旋转.此板簧搬运机械手系统由机械本体(执行机构)、控制系统、伺服驱动系统和检测传感装置等构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动生产设备.其中,执行机构即为串联型五关节的机械手本体,包括腰部、肩关节、肘关节、腕关节、大臂、小臂和平行气控手抓(安装在腕关节上).由于机械手持重比较大,在升降轴和摆动轴之间安装了平衡气缸,同时,根据每个关节的速度要求,计算出合适的减速比,选择合适的减速装置和传动装置.机械手的机构简图如图1所示.驱动系统采用伺服电机;尽管气压驱动系统具有结构简单、无污染的特点,但其输出力矩较小;而液压驱动系统可获得大的输出力,但是油液易产生泄露而影响运动精度.传感检测系统选用绝对式编码器检测每个关节的转动角度.控制系统采用以PC机为核心的集中控制方式,选用众为兴数控技术有限公司研制的基于PCI总线的高性能ADT-856运动控制卡.其中,PC机主要完成人机交互界面的管理和控制系统的实时监控,运动控制卡利用脉冲与方向信号的输出控制机械手各运动模块的伺服驱动器.机械手的系统控制、轨迹规划的工作原理如图2所示.
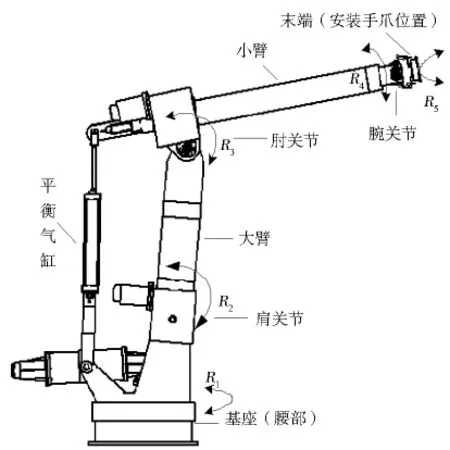
图1 机械手机构简图

图2 机械手工作原理图
2 机械手运动学模型的建立
机械手运动学问题的主要研究内容是机械手各连杆间的位置关系、速度关系和加速度关系,分为运动学正分析(正运动学问题)和运动学逆分析(逆运动学问题)两部分.它们为研究轨迹规划问题提供了理论基础.正运动学问题是在已知机械手杆件的DH参数和关节角θ(t)的情况下,求解末端执行器相对于参考坐标系的位姿,其解是唯一的、确定的.而逆运动学问题,是在已知手部末端空间位姿的情况下,求解出关节变量,其解是不唯一的[1],主要用于机械手的控制及轨迹规划.
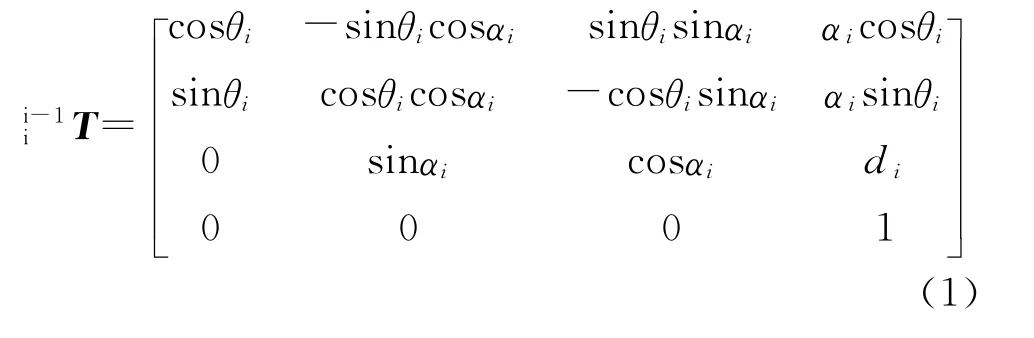
机械手的轨迹规划是在机械臂运动学和动力学的基础上,研究关节空间和笛卡儿空间中机械手运动的轨迹生成方法.无论是在哪种空间中规划,分析运动学正逆解问题和轨迹规划都需要先建立坐标系,确定D-H参数,才能建立运动学模型.利用D-H参数建模法建立其运动学坐标系(参考坐标系)如图3所示,坐标系的建立方法见参考文献[2] .5个旋转关节的角度:θ1,θ2,θ3,θ4,θ5为关节变量,当确定了机械手各连杆坐标系后,便可以列出各连杆参数,见表1,连杆参数的具体定义见参考文献[3] .连杆参数确定后,直接写出相邻两坐标系间的变换矩阵为
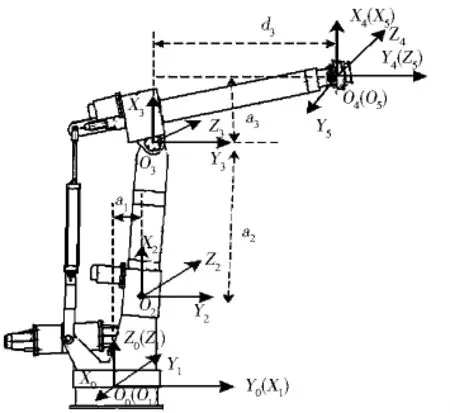
图3 机械手坐标系示意图
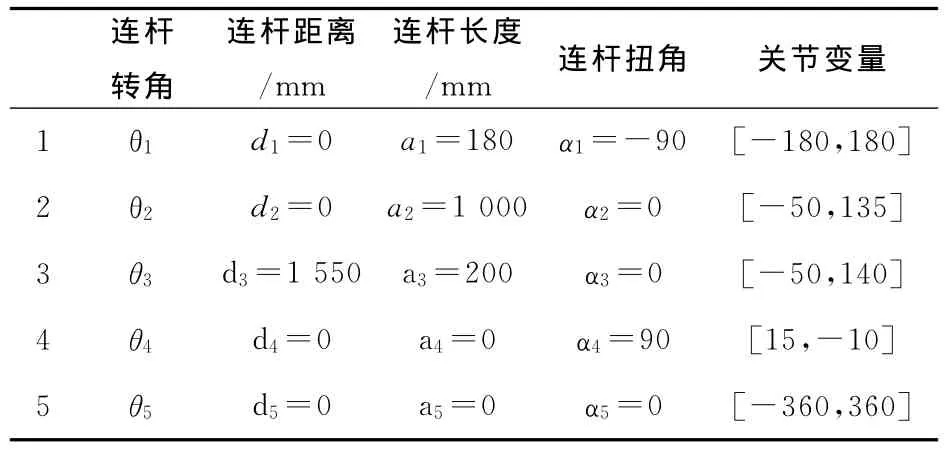
表1 板簧搬运机械手的D-H参数_
在此基础上,给出的机械臂运动方程为

其中,矢量n,o,a为含有未知数θi的表达式,表示末端执行器相对于基坐标的姿态;矢量p表示坐标系{5}的原点在坐标系{0}中的位置矢量[4].公式(2)所示运动方程表示末端连杆坐标系{5}相对于基坐标系{0}的位姿.
3 机械手的轨迹规划
工业机器人最常用的两种轨迹规划方法是关节空间规划法和笛卡尔空间规划法[5].不论是在关节坐标系下规划,还是在直角坐标系下进行规划,都必须满足所规划的轨迹是连续和平滑的,从而使机械臂运动平稳.
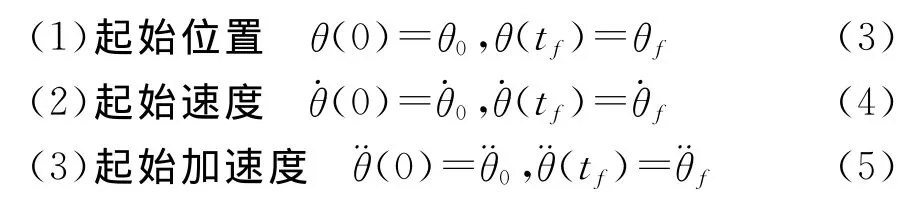
本文采用关节空间五次多项式插补算法.考虑到实际应用中板簧的质量一般在100~150kg,搬运机械手运动过程中速度不能太快,所以本文不考虑时间最优的问题,只要保证运动过程安全、平稳.当满足一定约束条件(只考虑运动学约束,不考虑力学),搬运机械手在路径无障碍下PTP运动时,需要给出机械手起始点、终止点手爪的位姿.在整个时间[t0,tf] 内,五次多项式插补算法,不仅可以保持位置和速度同时连续,还可以保证加速度不发生突变[6].取θ(t)在t=0时刻的值是起始关节角度θ0,在终端时刻tf的值是终止关节角度θf.为实现关节的平稳运动,轨迹函数θ(t)满足如下约束条件:
取五次多项式为

由约束条件得


根据公式(7)~(9)可以解出a0,a1,a2,a3,a4,a5五个未知数,带入公式(6),便可得到一个两端端点速度不为零的轨迹的插补五次多项式为

公式(10)是对单个关节的轨迹插值计算,对于五个关节的机械手,有5个不同的tif时间,需要考虑5个关节运动的协调,主要是通过同时启动、同时停止的控制思想来保证.所以整体的插补时间tf=max(tif),为机械手从起始点A点运动到终止点B点的时间.起始处A点的五个关节角已知为JA=[θ10θ20θ30θ40θ50] ,B点的五个关节角由所给的末端执行器位姿,通过运动学逆解来求得JB=[θ1fθ2fθ3fθ4fθ5f] ,由A点到B点之间持续的时间为tif=|θif-θi0|/ωimax(i=1,2,3,4,5).
4 仿真结果及分析
以MATLAB软件的robot工具箱作为仿真平台,利用表1所给出的机械手连杆参数,建立机械手运动学仿真模型.Link()函数的前4个元素依次为α,h,θ,d,最后一个为0(转动关节),构建机械手模型的主要命令如下:
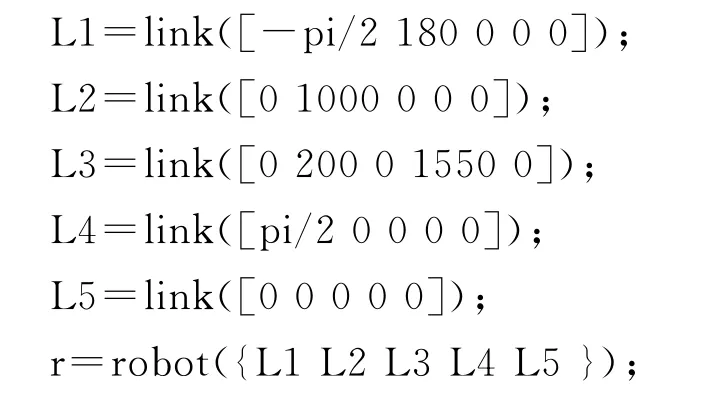
r.name='五轴板簧搬运机械手';
drivebot(r)
由此可得到机械手的三维图如图4所示.
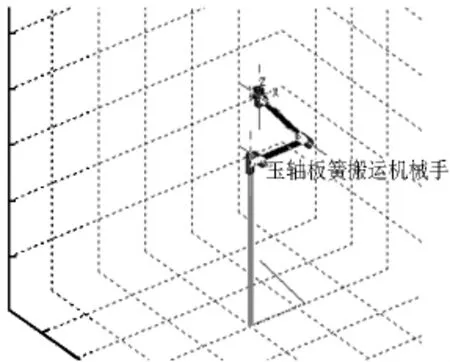
图4 机械手的三维建模图(起始位置)
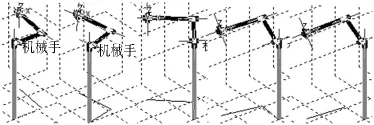
图5 机械手运动过程示意图
分别求出插值多项式θ(t)后,利用MATLAB仿真得到机械手五个关节的角度曲线、角速度曲线、角加速度曲线分别如图6、图7、图8所示,图中曲线光滑且连续.这说明采用5次多项式插补生成轨迹的方法,位移和速度曲线连续,即可实现实际中平滑的轨迹;而加速度曲线的连续,则说明机械手末端不会产生振动,保证了机械手工作的平稳性.

图6 五个关节的角度位置曲线

图7 五个关节的角速度曲线

图8 五个关节的角加速度曲线
机械手将汽车板簧从一处搬到另一处时,除了要给定起始点和终止点外,还应给出几个中间的经过点,如图9所示.与教学实验所用机器人相比,板簧搬运机械手所搬质量一般比较大,通常实际应用中,机械手的运动要经过如图9所示几点,所以可以将整个运动过程的轨迹分成几段,而每一段则直接采用上述的五次多项式插值的方法连接相邻的两个点,为了不使中间点产生停顿,还可以在中点上制定期望的速度.
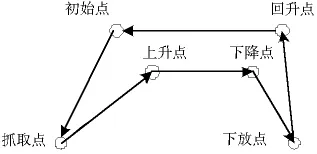
图9 机械手搬运过程示意图
5 结束语
采用D-H参数法推导出五自由度关节型板簧搬运机械手的运动学模型,利用MATLAB软件和robot工具箱进行机械手建模与仿真,可以清晰看出机械手轨迹规划运动的仿真结果,能够较好地反映出机械手的实际运行情况.五次多项式插值函数进行规划可以使板簧搬运机械手的五个运动关节角速度时间曲线、角加速度时间曲线变化都是连续平滑的.保证机器人在运动过程中运行平稳,没有冲击现象.
[1] 梅铁洲.IRB1400型机器人的运动分析及运动控制[D] .上海:海事大学,2005.
[2] 朱世强,王宣银.机器人技术及其应用[M] .杭州:浙江大学出版社,2007.
[3] 李玲.六自由度机器人运动学三维图形仿真研究[D] .大连:大连海事大学.2008.
[4] 姜明军.六自由度机器人运动轨迹优化控制[D] .大庆:大庆石油学院.2009.
[5] 颜世周.一种六自由度机器人的开发与轨迹规划算法研究[D] .淄博:山东理工大学,2004.
[6] 韩军,郝立.机器人关节空间的轨迹规划及仿真[J] .南京理工大学学报.2000,24(6):540-543.
