铁路有砟轨道自动养护测量系统研究思路探讨
2011-06-07曾若飞
曾若飞
(中铁工程设计咨询集团有限公司,北京 100055)
1 概述
根据国家《中长期铁路网规划(2008年调整)》,2020年全国铁路营业里程将达到12万km以上,其中客运专线为1.6万km,如此庞大的运营路网,对铁路的养护维修而言将是一个巨大的挑战。依据规划,有砟轨道将占据运营路网中的绝大部分,这其中不仅包括新建时速200 km以上的有砟客运专线,也包括通过铁路六次大提速而使运营速度达到200 km/h的部分既有线路。有砟轨道经过一段时间的运营后,其轨道几何形位将不可避免的偏移线路设计位置,不仅影响行车速度,造成乘车旅客的不舒适感,而且还会加剧钢轨的磨耗,使道床及路基承受不良状态的受力,对道床及路基结构造成破坏,导致铁路运营维护成本的上升,严重情况下还会危及行车安全。因此,必然要使用大型捣固设备对有砟轨道几何形位进行整正,使其满足运行需要。
使用捣固车对有砟轨道进行线路维护,将轨道拨道至正确位置,其前提条件是为捣固车的捣固控制系统提供正确的拨道量与起落量,而拨道量及起落量的获取则是通过线路测量的方法得到。我国传统的作业方法是通过既有线复测系统获取线路的几何形位状态,进而指导线路养护作业。既有线复测系统主要包括里程丈量、轨道抄平、导线测量及曲线计算等流程,同时引入了平面位置基准与高程位置基准,能够较为全面地反映轨道的几何状态。然而,该系统是基于落后的技术水平与测量手段建立起来,未能反映当前日新月异的测量新技术及装备水平,其主要特点是采用大量人工进行作业,效率低下且精度不高。随着我国铁路建设的大发展及路网规模的不断扩大,运营阶段的线路养护问题日益突出,落后的线路养护技术手段越来越不能适应现代化铁路养护的需求,因此,为了从根本上缓解庞大的线路养护作业需求与现有线路测量系统低精度、低效率间的矛盾,开展与捣固车配套作业的“有砟轨道自动养护测量系统”研究就显得尤为重要。
2 “有砟轨道自动养护测量系统”概念
作为与捣固车配合作业并为捣固车提供有砟轨道线路整正数据,能够满足现代铁路运营养护高效率、高精度作业需求的线路测量系统,“有砟轨道自动养护测量系统”集成了当前众多的测量新技术,进一步发展完善了轨道线形测量的数据处理理论,具有如下几个显著的特点:
(1)引入了绝对位置测量基准,包括平面位置基准及高程位置基准,也即通过该系统不仅能快速高效地获取轨道的轨距、超高等内部几何数据,还能获取左、右钢轨的平面位置及高程等外部几何数据,通过这些内外部数据来描述轨道完整的几何状态。
(2)与绝对位置测量功能相匹配,还需要有一个遍布全线的位置控制基准,这个控制基准为空间定位与测量提供了必要的位置信息。例如CPⅢ控制网就是基于空间三维坐标建立起来的这样一种位置控制基准。
(3)具有一个为线路运营管理提供技术支持服务的线路基础数据库,该数据库记录了所管理轨道的正确的几何状态,则在获得轨道实际几何状态数据后,将之与线路基础数据库中的数据进行比对分析,以获取线路捣固使用的起道量与拨道量。
(4)线路测量的最终目的是为捣固作业提供起拨道数据,且在满足行车要求的前提下,捣固作业量应该尽可能小。因此,仅仅通过与线路基础数据库进行比对来获取起拨道量是不够的,还应具有更加完善的轨道几何状态数据处理方法,以获得最优化的线路起拨道量。
综上所述,位置控制基准与线路基础数据库是“有砟轨道自动养护测量系统”能够进行正常测量作业的前提条件,需要提前实施;完善的数据处理则在获取数据之后进行,如何快速、高效、可靠地获取轨道的内外部几何数据,是“有砟轨道自动养护测量系统”的难点所在。
3 “有砟轨道自动养护测量系统”的需求与必要性
前已述及,既有线复测系统不能满足日益扩大的线路运营养护需要。为获取线路的起拨道量,还存在一种安装在捣固车上的弦测量系统。顾名思义,弦测量系统即是采用拉弦测量的方法,测量轨道的矢距并进而评判轨道的轨向平顺性与高低平顺性[1],然后捣固作业。由于该测量系统直接安装在捣固车上,因而实现了边测量边捣固的作业模式,有效提高了工作效率。然而,该方法的弦线长度通常只有10 m,也即只能测量轨道的短波平顺性,对长波平顺性测量无能为力。换句话说,采用弦测量系统捣固出来的轨道实际上是由无数的小碎波组合而成,圆曲线地段也不再遵从统一的曲线半径,从宏观上看轨道线形极为不利。
弦测量系统在本质上为一相对测量系统,其作业模式及效果如图1所示。

图1 相对测量系统作业示意
虽然捣固作业后的轨道在短波范围内比捣固前更加平顺,然而仍然偏离理论轨道较远,且长波不平顺没有得到实质性改善。研究表明,列车在较低速度运行时,其振动主要由轨道短波平顺性缺陷引起,此种缺陷可以采用弦线测量技术进行一定程度的修复;但在高速运行时,轨道长波不平顺成为影响列车运行安全和旅客乘坐舒适度的主要因素之一。很显然,弦线测量系统满足不了现代列车行车对轨道平顺性的要求。
因此,发展具有绝对测量功能的“有砟轨道自动养护测量系统”,使之不仅能够处理短波不平顺,同时还能够处理长波不平顺,并且可以与现代铁路养护的高精度、高效率相匹配,就显得尤为必要。
4 “有砟轨道自动养护测量系统”的主要技术思路
“有砟轨道自动养护测量系统”在国外已有一些成熟的技术产品,但与中国的国情不相适应:一是产品价格昂贵,如2 000万人民币至4 000万人民币一套;二是运营维护成本高,体积庞大,燃油驱动;三是国外没有在时速250 km的有砟铁路上成功应用过,测量精度证据不足;四是国外测量系统与中国铁路传统的工务基础测量(含数据库)观念及方法不完全兼容。鉴于此,我们认为应该结合中国铁路的具体情况,研究适合中国国情的技术产品系统。该系统的研究难点在于如何快速高效、成本合理且高精度地测量轨道的内外部几何数据,根据现有的测量技术水平,存在如下几种技术方案。
4.1 基于陀螺惯导及光电跟踪技术的测量方案
该方案仅采用一辆可在轨道上行走且具有动力的测量车,其上搭载了六个子系统,分别是陀螺惯导系统、光电跟踪系统、轨距测量系统、里程测量系统、数据采集与通信单元、数据处理系统,并基于沿线布置的控制基准进行线路测量作业,其作业模式如图2所示。首先给测量车一个起始位置,则测量车的走行距离可以通过里程测量系统得到,同时由光电跟踪系统跟踪测量车前方的绝对控制基准点并返回测量车与基准点间的相对位置关系,由陀螺惯导系统提供测量车在每一时刻的三维姿态信息,由轨距测量系统实时测量线路的轨距,最后由数据采集系统将所有的数据汇总起来,由数据处理系统解算出轨道在每一测量位置的几何状态,包括轨距、超高、平面位置及高程等。该系统的优点在于只有一辆测量车,简洁方便;光电跟踪目标可以设置为永久装置,且陀螺惯导及光电跟踪的实时性也较好,则整个系统测量作业的自动化程度较高,能够满足现代铁路自动化养护作业的需要,瑞士玛蒂莎公司的PALAS系统是应用该技术的成功先例。
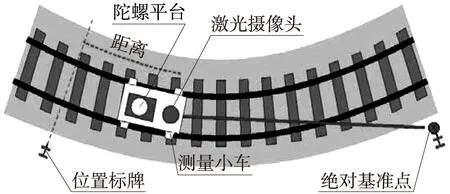
图2 基于陀螺惯导及光电跟踪技术的测量系统作业示意
4.2 基于智能型全站仪自动跟踪测量技术的测量方案
具有自动目标识别功能(ATR)及跟踪测量功能的智能型全站仪(测量机器人)一经推出,即在测绘工程界得到极为广泛的应用,本方案即利用测量机器人来实现线路的自动养护测量。系统由测量车A及测量车B两部分组成,A车搭载测量机器人,B车搭载轨距测量单元、超高测量单元、数据采集及处理单元等。作业时,首先由A车上的测量机器人后视线路两边的CPⅢ控制点进行自由设站[2],然后在对B车上的棱镜进行动态跟踪测量;B车则以一定的速度由远及近地向A车行进,同时由数据采集单元不断地采集轨距、超高等信息,最后结合棱镜三维坐标即可解算出轨道的内外部几何状态结果,其作业示意图如图3所示。
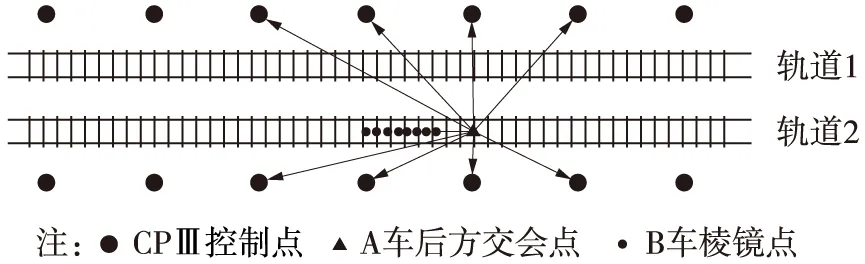
图3 基于测量机器人跟踪测量技术的测量系统作业示意
在实现动态高效测量的同时,测量精度决定了系统的成败。应用本方案进行的精度测试表明,在100 m左右的设站距离下,动态跟踪测量的精度能够得到保障,数据分析情况如图4所示。
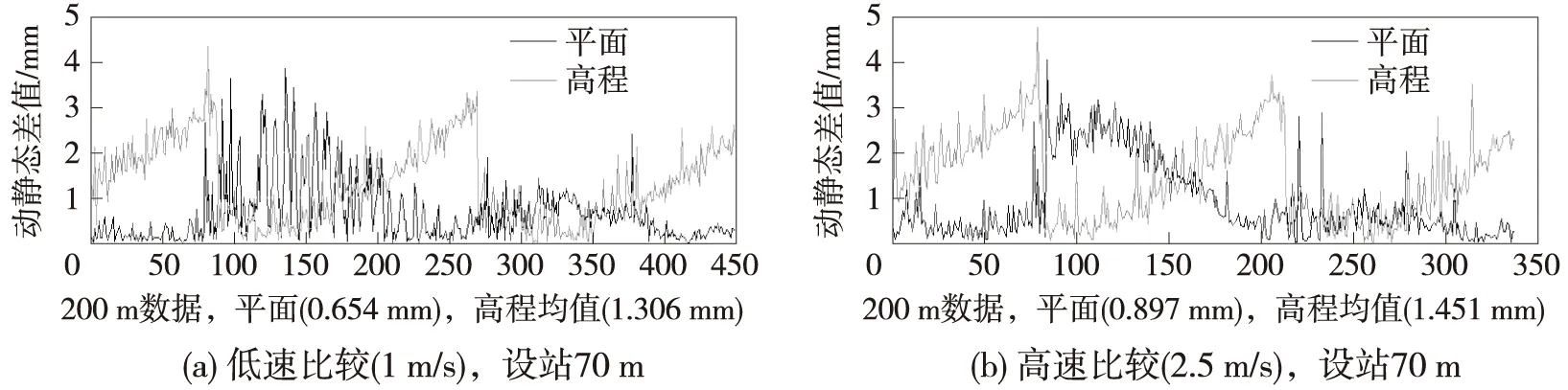
图4 测量机器人动态跟踪测量的精度测试情况
对图4的分析表明:在70 m设站距离下,分别以1 m/s及2.5 m/s的速度得到的动态跟踪测量结果与静态测量结果的比较,平面位置差值的均值不足1 mm,高程差值的均值小于1.5 mm,吻合较好。此外,为了提高系统的作业效率,对全站仪自由设站过程还可进行如下改进:
①采用三个CPⅢ控制点进行自由设站,且对设站精度进行适当放宽。
②由于CPⅢ控制网是精度均匀且相对精度良好的三维控制网,故可采用全站仪无整平设站技术进行自由设站,进而可节约大量的时间。
该系统的优点在于技术实现难度较小,测量机器人也提供有编程应用程序接口,易于实现编程自动控制,且可直接利用许多线路已经建成的CPⅢ控制网;缺点在于系统由两辆测量车组成,不够简便,且在作业过程中需要不断地进行CPⅢ棱镜的安装与拆卸工作。然而从总体来看,该技术方案仍然具有较大的研究价值。
4.3 基于近景摄影测量技术的测量方案
近景摄影测量技术近来得到飞速发展,不仅摄影器材得到长足进步,而且在图像处理、特征提取、目标判别等数据处理方法上也有巨大进展。该方案的原理如下:以沿轨道两侧的CPⅢ点作为像控点,联合轨道点与控制点[3],采用基于正反向三摄站交向摄影法为技术手段(图5),运用自检校光束法区域网平差理论,解算控制点的摄影测量坐标与轨道检测点坐标,然后根据轨道测点坐标计算轨道平顺度参数,进而得到轨道的起拨道量。
系统由一辆具有动力的测量车组成,搭载摄影仪器及数据采集单元。作业时,测量车在轨道上行驶,摄影仪器则不断地对轨道进行拍照并将数据保存下来,由此可实现轨道的实时动态测量。采用合适的摄影方案及像控策略,可以有效地保证测量精度;而数字图像处理技术则可自动实现同名影像匹配,极大的提高了数据处理效率。试验表明,采用近景摄影测量的方法获取的轨道几何状态数据能够达到毫米级精度。该技术方案的优点在于系统结构简洁,能够实现很高的动态测量效率;不足之处在于图像数据量异常庞大,不能进行数据的实时处理,且在特征提取方面仍然存在算法上的不足。

图5 某客运专线正反向三摄站交向摄影试验
4.4 基于激光弦测量技术的测量方案
将激光弦测量技术用于轨道线路测量早已有之,国内也有也有与捣固车配合作业的相关报导。然而国内目前的研究现状是根据激光准直原理对线路进行测量,仅能应用于直线地段,曲线地段还不能应用,而且未引入平面位置基准与高程位置基准,因此与弦线测量系统非常类似,仅仅是把每次测量的弦长增加了,从根本上讲仍是一个相对测量系统,不能满足长波平顺性测量的要求。
奥地利普拉塞公司的EM-SAT测量系统是基于激光弦测量且能够用于曲线地段测量的一个案例。EM-SAT系统由测量车(EM)及卫星前导车(SAT)构成,测量车搭载数据处理系统及各种控制和接收装置,用于激光弦测量、里程测量、轨距测量等;卫星前导车搭载激光发射源并根据固定桩系统进行绝对定位,作业时由测量车向卫星前导车行进,从而实现轨道几何状态的连续测量。该系统的运作有赖于一个事先建立的固定桩系统,这个固定桩系统采用里程加支距的方法建立,有别于使用空间三维坐标建立的控制基准(如图6所示)。
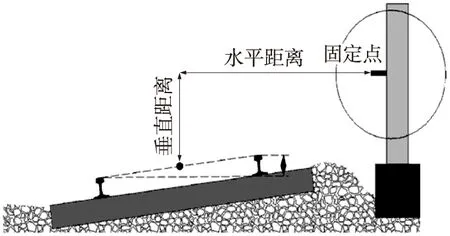
图6 EM-SAT固定桩系统示意
固定桩安装在线路旁边的接触网杆上,然后测量该固定桩在垂直于线路方向上与线路中心点的垂直距离及水平距离,并且记录该固定桩的所在里程,由此建立起控制基准。基于该控制基准,还建立有一个关于轨道几何状态的中央数据库,EM-SAT系统作业的前提,既是固定桩系统及其中央数据库。
如上所述,实现本方案所需建立的固定桩系统及其中央数据库中数据的表达方式,均与我国基于空间三维坐标建立的控制基准及数据表达方式相差甚远,采用本方案则意味着我国铁路已经建立的控制基准及相关成果均不能使用,破坏现有技术体系的延续性,并且成本异常巨大。
4.5 基于全球定位系统的测量方案
全球定位系统(GPS)能够对信号所及的空间任意点进行实时定位,且动态特性良好,能够满足“有砟轨道自动养护测量系统”对动态特性的要求。该方案采用一辆测量车,搭载GPS接收机、轨距测量系统、超高测量系统及数据处理系统,利用GPS的绝对定位功能[4],再结合轨距、超高等信息,可以解算出轨道的内外部几何状态。该方案的不足之处在于不论采用何种技术手段,GPS实时动态定位精度均达不到毫米级,离“有砟轨道自动养护测量系统”的测量精度尚有一定距离。
5 结束语
我国铁路规模的不断扩张对运营养护的效率提出了极高的要求,繁忙干线铁路的人工养护越来越不适应现实的需要,发展高质量、高效率养护技术已经成为我国铁路实现自动化养护的必然;而清除轨道长波缺陷的需要,也促使了轨道测量由相对测量向绝对测量的方式转变。基于我国铁路运营养护的现状及未来的现实需要,本文提出了“有砟轨道自动养护测量系统”这一概念,扫描了国内外轨道测量的现状,并对当前能够实现这一系统的各种技术方案进行了简要的评述。
[1]铁建设[2009]196号 高速铁路工程测量规范[S]
[2]张忠良,杨友涛,刘成龙.轨道精调中后方交会点三维严密平差方法研究[J].铁道工程学报,2008(5):33-36
[3]龚 涛.近景摄影测量控制点布设方案的研究[J].西南交通大学学报,1997,32(3):330-335
[4]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009,10