基于UG的经编机共轭凸轮机构运动仿真研究
2010-12-25魏法明年四甜
魏法明 年四甜
(江苏信息职业技术学院 无锡 214153)
一、引言
仿真就是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。计算机仿真的目标是科学计算的可视化,即把由数值计算或实验获得的大量数据按照其自身的物理背景进行有机地结合,用图像的方式来展示数据所表现的内容及其相互关系,便于把握过程的整体演进,发现其内在规律,缩短研究周期。由于计算机仿真技术可以替代费时、费力、费钱的真实实验,它已成为各种系统分析强有力工具。
UG 5.0软件中的运动仿真模块功能比较强大,而且UG软件可以自己造型,然后直接进入仿真模块中,省去了不同软件间的导入导出步骤,避免了零件特征的丢失。本文利用UG 5.0软件的运动仿真模块对经编机共轭凸轮机构进行运动学方面的分析,以此来分析整个设计过程的合理性,以及所得到凸轮机构的精确性。主要包括凸轮机构输出端的位移、速度、加速度方面的分析,并且检测机构的装配过程。
二、UG运动分析介绍
1、UG运动分析概述
UG是一个交互式的CAD/CAM/CAE系统,其提供了产品设计环境,使产品开发从设计到加工真正实现了数据的无缝集成,从而优化了企业的产品设计与制造。其中CAE功能则实现了三维实体模型的优化设计,包括对机构的运动仿真与有限元的分析,可以进行机构的干涉分析,跟踪零件在机构运动中的轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。运动分析的结果可以指导零件的结构设计和优化设计。
2、UG运动学分析步骤
(1)运动分析前期准备
首先要创建产品的CAD模型,模型文件可以是装配文件,也可以是单一的实体模型;其次在UG主程序中启动UG/motion并进行运动分析模块预设置。运动分析模块预设置功能可控制显示参数、分析文件及后处理参数。这些参数控制运动分析方案元素的显示方式、求解时解算器用到的质量、重力常数以及一些其它的后处理功能。
(2)创建运动分析方案
UG中认为机械系统是一组连接在一起运动的连杆集合。可由下面三步产生一个运动分析方案:
①创建连杆
连杆是UG运动仿真模块中最基础的部分,需要创建的连杆是指机构中所有的运动零件,因为所有的运动零件必须和连杆相连,所以至少有一个连杆不能有位移。对于机架部分可以不创建连杆,如果创建其为连杆则必须为固定连杆。
②创建运动副
运动副就是将机构中的连杆连接在一起,使连杆一起运动,并约束连杆在规定的范围内运动。根据连杆之间实际的相对运动创建相应的运动副,例如旋转副、滑动副、平面副、球面副等。
③定义运动驱动。运动驱动是附在运动副上控制运动的参数,共有五种类型:
a.无驱动:只受重力作用,没有外加的运动驱动;
b.运动函数:用数学函数描述复杂的运动驱动;
c.恒定驱动:以恒定的速度(角速度)、加速度(角加速度)运动;
d.简谐运动驱动:产生一个光滑的向前或向后的正弦运动;
e.关节运动驱动:以特定的步长(旋转或线性位移)和特定的步数运动。
(3)机械系统运动分析
不同的运动驱动产生不同的运动。当运动驱动定义为关节运动驱动时,机械系统以特定的步长和步数运动,用户可以对其进行关节运动分析。当运动驱动为运动函数、恒定驱动或简谐运动时,则可以对机械系统进行运动仿真。
(4)仿真结果数据分析
当机械系统作关节运动或运动仿真分析时,UG内部生成一组输出数据,利用电子表格和图表功能可以将这些数据以表格或图形的格式表示。
三、经编机共轭凸轮机构仿真模型的建立
1、共轭凸轮机构主模型的建模及装配
经编机共轭凸轮机构的整体结构形式是比较简单的,零件的个数少,所以其仿真模型的建立是比较容易的。经编机针床传动简图如图1所示[1]。
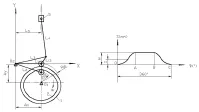
图1 经编机针床传动机构简图
针床5作有停歇的往复移动,它的运动由共轭凸轮通过连杆控制来实现,这是一种由共扼凸轮机构和摇杆滑块机构串联而成的组合机构。针床的运动规律如图2所示。当共轭凸轮转角在OA区间时,针床自最低位置按确定的运动规律上升至最高位置;在AB区间时,针床休止不动;到BC区间时,针床自最高位置再按确定的运动规律返回至最低位置,从而完成一个运动循环。

图2 针床运动规律
有 关 参 数 如 下 :L1=185mm,L2=195mm,L3=256mm,L13=56mm,L4=250mm,L5=175mm,Ax=185mm,Ay=130mm,R01=130mm,R02=75mm,两滚子半径r=20mm,凸轮角速度ω=20r/s。
针床运动规律:凸轮转角00~1200,钩针按正弦加速度运动上升25mm
凸轮转角1200~2400,休止不动
凸轮转角2400~3600,钩针按正弦加速度运动下降25mm
已知从动件运动规律和有关参数,通过参数化设计可得到凸轮的轮廓点云,利用UG将点云拟合成凸轮轮廓曲线,最终利用UG建模与装配模块得到机构主模型,如图3所示。
2、运动副约束及驱动的建立
模型建好之后,进入运动仿真模块,便可对各部件及其关节处施加约束[2]。首先定义连杆,对此模型需要把图3中的所有实体都定义为连杆,即凸轮(L001)、滚子(L002 和 L003)、摆杆(L004)、连杆(L005)、滑块(L006)、机架(L007)共创建 7 个连杆。其次定义各连杆之间的运动副,有6个转动运动副和1个移动运动副,分别为J002:凸轮相对于机座旋转(旋转副);J003和J004:滚子相对于摆杆旋转(旋转副);J005:摆杆相对于机座旋转(旋转副);J006:连杆与摆杆之间旋转(旋转副);J007:滑块与连杆之间旋转(旋转副);J008:滑块相对于机座滑动(滑动副)。凸轮和摇杆的第二连杆都为大地,即相对于大地旋转,它们的转轴即为各自的中心。滚子与凸轮之间的接触选择3D接触。最后定义运动驱动,根据仿真的实际需要创建J002的同时定义运动驱动为恒定驱动,角速度为300/s匀速旋转。这样一个简化的凸轮机构的仿真模型便设置完成,其最终的模型如图4所示,包括连杆、运动副、以及驱动的位置。

图3 共轭凸轮机构的主模型
四、运动学仿真分析以及后处理
共轭凸轮机构运动学的仿真分析,主要是求解凸轮机构的输入与输出杆件之间的位置、速度与加速度之间的关系。并且通过运动仿真的分析来分析检验各杆件之间是否会发生干涉,考察和评价整个机构的速度和加速度特性,检查整个装置的设计以及装配是否满足实际的要求。
共轭凸轮机构的仿真运动过程是选择凸轮实体作为驱动机构,滑块作为输出,以此来观察输出的位移、速度、加速度曲线是否与预先设置的凸轮曲线相符合,在这里对滚子与凸轮之间的关系,设置为高副接触。选择已加约束与驱动后的仿真模型(如图4所示),定义解算参数:解算方案类型为常规,凸轮旋转一周需12秒,所以设定仿真时间为12s,步数选择180(如图5所示),即凸轮转过一圈,滑块完成一个往复运动。
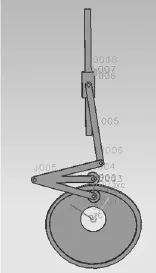
图4 加约束与驱动后的仿真模型

图5 运动仿真分析选项

图6 输出端的位移曲线图
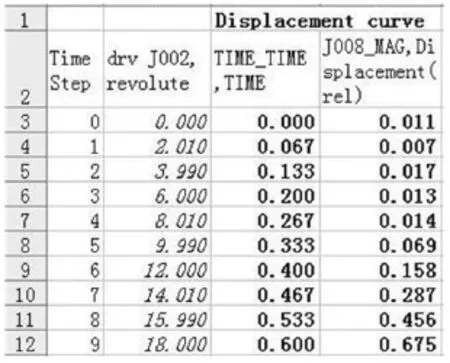
图7 输出端的位移曲线数据点

图8 输出端的速度曲线图

图9 输出端的速度曲线数据点

图10 输出端的加速度曲线图图

图11 输出端的加速度曲线数据点
经过ADAMS解算器的解算,可得出输出端的位移、速度、加速度的时间曲线[3],如图6、8、10所示,同时可得到相应的文本数据,如图7、9、11所示。图6、8、10中以仿真运动的时间作为横坐标,可以把所得到的各曲线与摆线正弦曲线进行比较,分析其精确度。由图可以看出所得到的位移曲线、速度曲线规律还是比较清晰的,但加速度曲线规律则不是很理想,某些点存在粗大误差,应予以剔除。如果使用环境对加速度曲线的规律要求不是太高的话,该凸轮模型符合使用要求,但需要严格控制加速度的输出时,则需要重新生成凸轮的实体模型,所以在由点云到实体的这一过程还有待进一步的研究与加深,需要更完整的动力学运动学理论来实现这一过程,减少在仿真过程中凸轮机构的振动情况。
五、结束语
本文以凸轮实体作为驱动机构,滑块作为输出端,以此来观察输出端的位移、速度、加速度曲线是否与预先设置的凸轮曲线相符合;在运功仿真过程中观察凸轮实体与滚子之间的接触情况。通过对多种结果输出形式的分析,检测了凸轮机构设计的合理性以及准确性,设计人员可以得知所设计的经编机共轭凸轮机构的优劣。
[1]顾连森.设计经编机中共轭凸轮廓线的解析法.无锡轻工业学院学报,1990,9(3)58~69.
[2]宋晓华,方坤礼.基于UG的凸轮机构设计和运动仿真[J].机械研究与应用,2005,18(1):102~104.
[3]刘善林,胡鹏浩,张勇.基于UG的凸轮机构运动仿真研究[J].计算机应用技术,2007,34(12):44~46.