舰艇狭水道操纵安全的模糊评价模型
2010-06-07石嘉晟刘常波丁风雷
石嘉晟 刘常波 丁风雷
海军潜艇学院,山东 青岛 266071
舰艇狭水道操纵安全的模糊评价模型
石嘉晟 刘常波 丁风雷
海军潜艇学院,山东 青岛 266071
舰船狭水道航行是航渡中影响安全的重要阶段。为了安全高效地操纵舰船,有必要对其安全性进行定量安全评价。采用基于AHP模糊评判方法,介绍权重的计算并结合实例说明如何用模糊评判的方法,得出量化的结果,以及在实际问题上的应用,验证了实际应用中的可行性。
层次分析;权重;模糊评判;安全;操纵性
1 引言
舰艇操纵者为保持或改变舰艇运动状态所进行必要的观察、分析、评价、判断、下达指令乃至实施控制的全过程即为舰艇操纵。舰艇操纵系统由人、舰艇和舰艇所航行环境3个子系统构成,而舰艇航行环境又包含操纵环境、交通环境和信息环境,这里主要讨论对操艇环境的评价[1]。为了安全而高效地操纵舰艇,操纵者必须搜集和测定必要的信息并对上述信息进行必要的分析及处理,对操艇信息进行测定、分析和处理的过程就是对舰艇操纵安全进行评价的过程。
相比于对数据的要求比较高,且数据准确、充分,分析完整,判断和假设合理的概率危险评价法,模糊综合评价的优点是在实际应用上相对容易实现;相比于各评价指标相互独立,缺乏系统性的评分评价法,模糊综合评价具有系统性。
舰艇在狭水道操纵时,具有复杂、影响因素众多的特点,而且很多因素概念模糊,难用传统数学模型加以描述,使得人们几乎无法预测其是否安全。模糊综合评价是在模糊的环境中,考虑多种因素的影响,出于某种目的对某事物做出的判断,它可以处理用其它方法难以处理的模糊信息。因此,本文采用模糊的方法对舰艇狭水道操纵安全进行评价[2-5]。
2 运用层次分析法的评价方法
层次分析法(AHP),是从定性分析到定量分析综合集成的一种典型的系统工程方法,它将人们对复杂系统的思维过程数学化,将人的主观判断为主的定性分析进行定量化,将各种判断要素之间的差异数值化,帮助人们保持思维过程的一致性,适用于复杂的模糊综合评价系统,是目前一种被广泛应用的确定权重的方法。AHP在实用中存在的主要问题是如何构造、检验和修正判断矩阵的一致性问题和计算判断矩阵各要素的权重。目前已提出的处理方法的主要问题是主观性强、修正标准对原判断矩阵而言不能保证是最优的或只对判断矩阵的个别元素进行修正,但至今尚没有一个统一的修正模式,实际应用AHP时多数是凭经验和技巧进行修正,缺乏相应的科学理论和方法指导。AHP主要包括四个方面内容:
1)建立描述系统功能或特征的内部独立的递阶层次结构;
2)两两比较结构要素,构造出所有的评判矩阵;
3)解矩阵,得出特征根和特征向量并检验每个评判矩阵的一致性;
4)计算各层元素的组合权重。如果指标数目超过7个,可以将各指标分层归类。
鉴于AHP本身的有效性和准确性,所求取的各层指标 (包括最低层指标)的权重是合理有效的。因此,可以采用改进AHP来确定各层指标的权重。但在多指标综合评价中 (如指标数超过7个),AHP不适于求取各指标的权重。
3 评价模型
针对舰船狭水道操纵的特点,将AHP和模糊理论相结合建立了安全评价模型[6-10]。
1)确定质量评价的影响因素论域

和评语等级矩阵

式中,ui为最低层指标(i=1,2,…,n)。 如果n≥7,则可以采用分级的层次结构,同一级指标按照属性分为不同的模糊子集,各个子集下又可包含有小指标,小指标下还可以有小指标的结构,并保证总目标及每个指标下所对应的的下一层指标的个数不超过6个。m为评语等级集合的个数,每一个等级可对应一个模糊子集。具体等级可以依据评价内容用适当的语言描述。
2)判断矩阵是由专家组确定的。通常专家组的人数在5~20之间,专家不同,对定性事物的看法必将有差异。所以,通过各个专家对评估因素的判断,可以得到多个判断矩阵。而我们并不能武断地说哪个专家的判断才是最准确的意见,也不能因为哪位专家的意见与大多数专家的意见相悖,就不考虑他的意见,故必须找出一种方法对专家的意见进行处理。


①计算判断矩阵每一行元素的乘积Mi


则 W = [W1,W2,…,Wi,…,Wn]T为所求的特征向量,就是所要求的评价因素的权重。
3)一致性检验
计算比较判断矩阵的最大特征值λmax

式中,(AW)i表示向量AW的第i个元素,n是判断矩阵的阶数。
一致性的判据为CR<0.10时,即认为A的不一致程度在容许范围内,可用其特征向量作为权向量,否则要重新成对比较.对A加以调整。
一致性检验的必要性,即要求判断具有大体的一致性是应该的,若出现A比B极端重要,B比C极端重要,C又比A极端重要的情况显然是违反常识的,而且,当判断偏离一致性过大时,排序向量计算的特征根法将出现某些问题。因此,在求出后,要进行一致性检验,这是保证结论可靠的必要条件。
4)确定评价指标集
狭水道舰艇操纵安全评价指标是由舰艇操纵性能、地形环境条件、航行条件和船舶操纵信息组成。舰艇在狭水道中航行的5种基本性能的衡量指标分别为:15°舵角的回舵实验中剩余角速度;Z形实验中的初始转艏时间;旋回实验中的相对回转直径;倒车冲程与船长之比以及能够维持舵效的最低航速。
在地形条件中,航道宽度的衡量指标为航道宽度与船宽之比,航道弯曲度的衡量指标为曲率半径与船长之比。
航行条件中,其各因素对舰艇操纵性能的影响,是通过舰艇在这些航行条件下的操纵性能与标准条件下舰艇操纵性能比较得到的,这里所谓的标准条件是指无风、无流、无浪且水深为无限深的状态。
在操船信息中,把能见度与船长之比作为视距的衡量指标,而航道中助航设施主要考虑浮标数目,这里取平均每10 nmile的航道一侧浮标数作为其指标值。
各指标因素的相对权重由层次分析法来确定。根据这个方法可得出系统安全性评价指标体系的递阶层次结构,如图1所示。

图1 安全评价指标体系
5)对每个影响因素进行评价,建立其模糊关系矩阵 R。逐个对影响因素从底层指标 ui(i=1,2,…,n)上进行量化,也就是确定从单指标来看影响因素对模糊子集的隶属度,进而得到式(2)所示的模糊关系矩阵R。

式中,rij表示某个影响因素从指标ui来看对vj等级模糊子集的隶属度。
6)计算各影响因素的评价结果向量S,并作综合评判

式中,“g”代表模糊合成算子;S是评价结果向量,它反映了该影响因素对评语论域V中各模糊子集的隶属程度,确定此产品所对应的等级。
4 应用实例
根据上一节建立的评价模型对某狭水道中某型舰艇操纵的安全性进行评价,结合该舰艇和狭水道的特点建立了表1所示的2级层次结构评价体系。舰艇操纵安全性的总目标:一级为A1~An,共4个影响因素;二级为10个具体的影响指标,用B1~B10来表示。
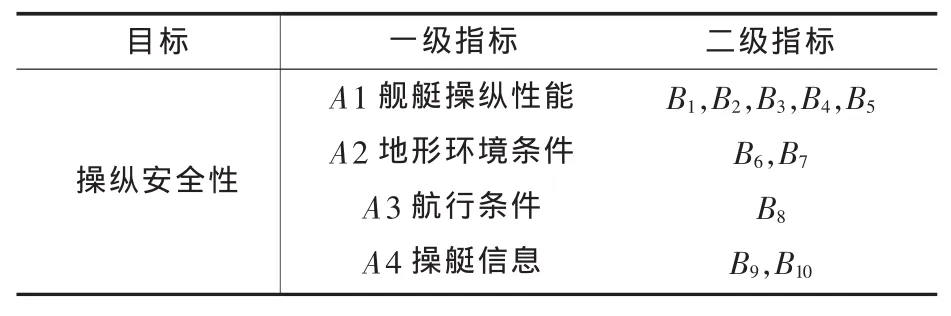
表1 评价指标
该舰船狭水道航行的操纵安全性可以分为7个等级:极其危险 v1,危险 v2、略有危险 v3、无危险感觉v4、略感安全 v5、安全 v6和极其安全v7;对应的评语等级矩阵为:


表2 模糊子集表
总共聘请10位专家对各影响因素内的影响指标,即第1级指标进行一对一的比较,构造出各子集的单因素判断矩阵A1

得到权重为:

同理,我们可以求得二级指标的判断矩阵B1、B2、B3和 B4。
运用AHP方法,根据专家的打分情况确定各子集内各个单因素的权重分别为:

组合权重为:

专家根据模糊子集表(表2)对各因素打分,得

则最终的评价结果向量为:

可以确定该舰艇狭水道操纵安全性等级属于“安全”。
5 结论
本文结合舰船狭水道操纵影响因素多样的特点,采用改进AHP求取各层次指标的权重,采用模糊方法确定各评价指标的隶属度,并在最后采用AHP和模糊理论的综合评价方法,获得评价结果。模糊关系矩阵的求解简单可行,易于推广,验证了实际应用中的可行性。
[1] 石嘉晟,张荣昌.基于改进AHP模糊综合评判的舰船设备质量评价应用[J].中国修船,2009,22(3):46-48.
[2] 方祥麟,姚杰,卓永强,等.船舶交通及操纵安全系统评价模型与方法[M].大连:大连海事大学出版社,2003.
[3] 王国正.浅析狭水道的航行特点与航行方法[J].交通科技,2008(2):118-119.
[4] 潘辉.海轮在狭水道中的安全航行探讨[J].武汉船舶职业技术学院学报,2006,5(6):14-16.
[5] ZHANG D Z,CHANG T,LE R,WEIX P.Evaluating design concepts using fuzzy arithmetic operations[C]//Intelligent Systems Design and Applications,2006.ISDA'06.Sixth International Conference,2006:254-259.
[6] 赵俊豪.基于模糊FMEA的实习船主机燃油系统安全评估[D].大连:大连海事大学,2007.
[7] 冯昌林,田福庆,刘骏.舰炮武器系统作战效能的模糊综合评价[J].火炮发射与控制学报,2007(1):12-15.
[8] 李志民,张群,邵球军.AHP模糊综合评价法在金属矿业投资分析中的应用[J].金属矿山,2008(1):19-23.
[9] 李华文,吕靖.船舶适航性的模糊综合评价[J].大连海事大学学报,2006,32(4):54-57.
[10] 刘元丰,唐兴莉.基于模糊综合评判方法的船舶航行安全评价[J].重庆交通学院学报,2004,23(3):123-126.
A Fu zz y Assessment Model of Steering S afety of the Vessel in the Gat
Shi Jia-sheng Liu Chang-bo Di ng Feng-lei
Nav a l Submarine Academ y, Qing d ao 266071,China
The steering of vessel in the gat is a crucial phase that affect s s afety.For steering the vessel more efficiently, it is necessary to assess the safety condition quantificationally.On the basis of the method of the AHP fuzzy assessment, the accounting of weight coefficient was introduced, and the methods of getting the quantification results and its application to practical problems were accounted for,through combining the example,thus validating its feasibility in practice.
hierarchy analysis; weight coefficient; fuzzy assessment; safety; steerability
U676.1
A
1673-3185(2010)01-48-04
2009-07-20
某型潜艇水上航行超重安全研究
石嘉晟(1982-),男,硕士研究生。研究方向:航行安全技术。E-mail:shijiasheng0427@yahoo.com.cn
刘常波(1963-),男,副教授。研究方向:潜艇操纵性
