基于MPC 的分布式驱动越野车辆原地转向控制研究
2023-12-08谭雨豪刘泽轩
付 翔, 谭雨豪, 刘泽轩, 周 军
(1.武汉理工大学 汽车工程学院,武汉 430070;2.中国人民解放军63969部队,南京 210000)
分布式驱动车辆已成为新能源汽车动力系统领域的研究热点[1],相较于传统驱动车辆,分布式驱动车辆具有响应快速、各轮独立可控的优点,通过差扭或差速转向,可以大大减小车辆的转弯半径,特殊情况下可以实现原地转向,实现0 转弯半径,称之为中心转向。具有原地转向功能的越野车辆,可以使车辆在街道、桥头或特殊地形等狭窄地面条件下进行转向和调头[2],具备更加灵活的驱动形式,拥有更强的越野机动性。
目前,国内外学者根据不同的原地转向机理针对不同类型运载工具设计了多种原地转向方式。考虑不同运载工具的工况需求,其原地转向机理的侧重点也有不同。周福阳等[3]设计了一种农用柔性底盘,通过原地姿态切换的方式偏置转向轴,改变轮胎布置方式实现原地中心转向和原地纵横行切换。改变车轮的布置方式最容易实现原地中心转向,但存在车身结构复杂,原地转向时需要车身姿态转换,过程繁琐等问题。孔宁宁等[4]基于Adams设计了一种安全阀搬运自动导向车,利用万向轮惯性原理实现车辆原地转向,在小型底盘上容易实现,但基于万向轮结构的原地转向原理的强度不契合越野车辆,其稳定性达不到越野车辆的需求。康亚彪等[5]对野外无人车辆原地转向进行了动力学分析,推导出原地转向所需的阻力矩、驱动力矩和功率,并通过计算模型进行了验证,结果表明轮毂电机分布式驱动车辆具有实现原地中心转向的理论基础。白鸿飞[6]在无人驾驶分布式电驱动试验车设计与程序开发中通过改变轮胎布置方式实现原地中心转向和较小转向半径转向。采用轮毂电机分布式驱动的方式进行原地转向,但是也改变了轮胎布置方式,原地转向时存在模式切换复杂,机动性不高等问题。张晓莹等[7]设计了一种六轮电动轮铰接车的原地转向,通过驱动转向油缸使铰接车辆达到最大铰接角,实现铰接车原地转向过程。通过改变底盘布置减小转向半径,但是存在底盘特殊、应用面比较窄的问题。综合以上原地转向的相关研究,原地转向的现有方法较多,但对于越野车辆,暂无特别适配的原地转向模式。本文立足于越野车辆,基于传统底盘布置,进行分布式驱动越野车辆原地转向控制研究。
同时,分布式驱动车辆能通过灵活的电子控制策略对车轮转矩或转速进行控制,因此对分布式驱动车辆控制算法进行研究,有利于实现车辆原地转向的功能。本文意在通过控制左右侧车轮反转实现原地转向,旨在尽可能减小车辆转弯半径直至为0,以提高车辆转向机动性能。HOU Rufei等[8]基于分布式驱动车辆提出了一种适合于道路附着力的分级转向稳定性控制策略,针对每个电动机转矩的权重因子设计为适应每个车轮的不同附着力,仿真结果表明,该策略能提高车辆行驶的稳定性。肖祥慧等[9]提出了一种基于模型预测控制器的轮毂电机转矩分配控制系统,综合分析并保证分布式驱动车辆稳定性所需的轮毂电机转矩约束条件,对4 个轮毂电机进行实时控制,执行设计的最优转矩分配方案。胡金芳等[10]为了改善分布式驱动转向机动性能,对于高速转向行驶稳定性的需求,通过二次规划方法优化分配各车轮驱动力矩,根据车速和稳定性参数制定模糊规则来决策两种模式的协调系数,并仿真验证了有效性。XIE Ju 等[11]针对分布式驱动自主电动汽车的路径跟踪问题,提出了利用横摆力矩对跟踪偏差补偿和车辆稳定性进行协调控制的方法,以提高跟踪精度和车辆稳定性。纵观以上研究成果,目前研究人员对分布式驱动控制方面已有较深认识,但是大多数研究都集中在车辆的稳定性控制,对原地转向这种特殊工况的研究不够深入,缺乏较成熟的控制体系。对于分布式驱动车辆原地转向研究,应从车辆控制的安全性、稳定性、以及横摆力矩决策和转矩分配等方面考虑,开发其控制算法,安全有效地实现其原地转向功能。
模型预测控制(Model Predictive Control,MPC)通过反馈回路优化方法,可以实现控制目标和被控对象的连续控制,适用于解决非线性、在线约束和多输入多输出问题,目前在车辆控制领域应用广泛[12]。李旭等[13]提出了一种改进的基于模糊控制框架的变采样时间MPC 策略,该策略在复杂工况下能提高系统的响应速度,且具备较好的舒适性和安全性。庄元强等[14]提出一种基于非线性模型预测控制算法转矩协调控制策略。该策略可以改善车辆行驶稳定性,确保车轮滑移率维持在稳定的范围内,提高车辆驱动、制动的稳定性。本文利用MPC算法的在线优化和对非线性控制问题的求解以及解决纯滞后问题的独特优势,契合越野车辆原地转向需求。
本文分析了原地转向机理、结合车辆特性分析并建立了车辆原地转向系统模型,搭建了分布式驱动车辆原地转向分层控制策略,上层结合MPC 和PI滑模算法,设计了基于质心位置和方向误差的横摆力矩决策跟踪器,下层控制器基于二次规划,以轮胎附着利用率为优化目标分配四轮转矩。通过搭建硬件在环仿真平台,验证所设计的控制策略。
1 原地转向动力学分析
通过分析研究对象的系统特性,明确控制对象特点,建立了符合控制需求的车辆动力学模型。通过探究轮毂电机分布式驱动车辆特性与原地转向运动的联系,明确轮毂电机分布式驱动车辆在结构和控制层面的优势。
研究对象为一辆四轮毂电机分布式驱动车辆,可通过控制左右侧车轮向相反方向运动实现原地转向。轮毂电机分布式驱动车辆的原地转向过程主要是依据差速转向的方式,即通过施加外力使左右两侧车轮产生不同方向的速度,从而利用两侧车轮速度差实现原地转向,当车辆进行原地转向时,最理想的状态为车辆的转弯半径和转向中心的偏移量为0。
1.1 整车动力学模型
忽略车辆的垂向、俯仰和侧倾运动,车辆在大地坐标系X-Y上运动,以车身坐标系x-y来描述车辆运动[15],如图2所示,建立纵向、横向和四个车轮旋转动力学的七自由度模型,易推导出如下的车辆动力学方程[16]。
式中:m为整车质量;vx和vy为纵向和横向速度;ωr为车辆横摆角速度;Fxi为第i个车轮受到的纵向力;Fyi为第i个车轮受到的侧向力;Iz为车辆绕z轴的转动惯量;B为轮距;lf表示前轴到质心的距离;lr表示后轴到质心的距离;γ为车身横摆角。
如图2所示,每个车轮的旋转动力学方程为:
式中:J为车轮的转动惯量;ωw为车轮的转角加速度;Tdi为车轮驱动转矩;Tri为第i个车轮在行驶过程中由于弹性滞后引起的滚动阻力;Fxi为第i个车轮的纵向驱动力;r为车轮半径;Tb为制动转矩。
在车轮转向过程中,各轮胎垂向载荷由侧向和纵向加速度引起的载荷转移决定,4 个车轮的垂向载荷可以表示为:
式(3)中,纵向和横向的加速度ax和ay由式(4)得到。
车辆进行原地转向时,由于纵向速度接近0,车轮会处于滑移状态,此时侧偏角和纵向侧滑率都存在,轮胎在完全滑移的条件下,轮胎变形如图3所示。
在侧偏角和纵向滑移率都存在的情况下,基于轮胎摩擦圆理论和以抛物线分布的地面法向力的轮胎联合模型,可得出车轮所受合力为[17]:
式中:μ是轮胎胎面基底与路面间的摩擦系数;σ是总滑移率;σm是完全滑动可达到的最大滑移值;θ是轮胎参数和地面法向力函数常数;k是每单位面积的轮胎侧向刚度。
总滑移率与侧向滑移率σy和纵向滑移率σx有关,如式(7)所示。
则纵向力和侧向力可由式(8)给出:
式(4) 中的σx和σy可 由 式(10) ~(11)得到。
式中:ωw为车轮转速;reff为有效半径;Vx为车辆纵向速度;α为车轮侧偏角。
1.2 原地转向机理分析
由图2 可知,车辆在转向过程中产生的总转向阻力矩为:
滚动阻力Ffi的计算如式(13)所示。
式中:f为滚动阻力系数。
总的驱动力矩为:
代入整车参数即可求得各力矩的值。
为了后续控制策略的设计,计算整车最大横摆角加速度,如式(15)所示。
由上述式子可知,在驱动力矩与转向阻力矩相等时,车辆达到稳定转向状态,驱动力矩小于转向阻力矩时,车辆无法转向,驱动力矩大于转向阻力矩时,在车辆转向过程中存在转向角加速度,当两侧车轮反向时,即可进行原地转向。
2 原地转向控制策略设计
如图4 所示,原地转向模式采用一键切换模式,为了便于对功能的更新和子控制器的拓展,本文对控制器采用了分层控制结构。四轮独立驱动越野车辆原地转向控制策略由上层期望横摆力矩决策层和下层横摆力矩分配层构成。
上层控制器包括期望控制输入决策器和期望控制输入跟踪器,基于MPC 控制器,以车辆当前质心位置X、Y、γ为状态量,尽可能小的质心偏移量χ(x,y,γ),ey=Y-Yr,ex=X-Xr为控制目标,设计期望的横摆角速度ωrd,将横摆角速度实际值和期望值误差作为滑模控制器输入,上节计算得出的整车最大横摆角加速度作为限值,防止侧向加速度出现失稳的情况,计算输出实现车辆原地转向的横摆力矩。下层控制器以轮胎附着力利用率为优化目标,电机系统以及轮胎附着力极限为约束,优化分配上层控制器输出的横摆力矩,轮毂电机依据下层控制器的优化转矩调整转矩,从而形成作用在车辆上的直接横摆力矩,实现原地转向功能。
2.1 上层期望横摆力矩决策
2.1.1 基于MPC的控制变量期望值计算
MPC 控制器的整体架构主要分为3 步:建立系统模型并预测系统未来状态;设计目标函数;根据约束条件求解最优化问题[18-19]。
由图1 可知,在地面固定坐标系XOY下,车辆运动学方程为:
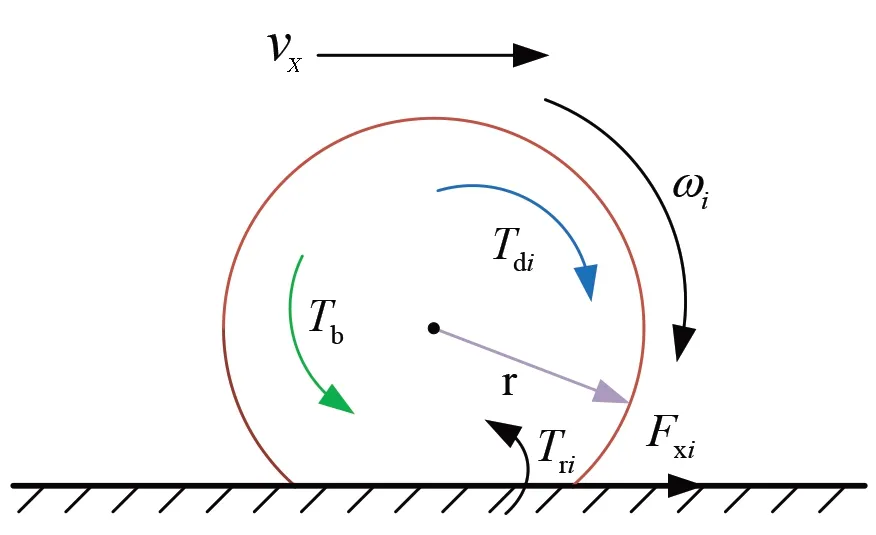
图2 车轮动力学分析

图3 存在侧偏角下的轮胎变形
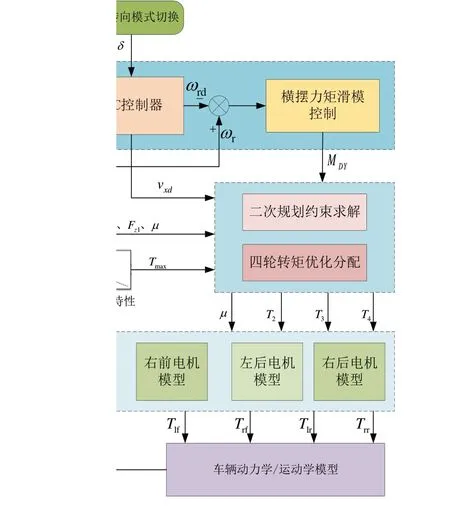
图4 原地转向分层控制结构
根据式(16),将系统看作一个输入为u(v,ωr)和状态量为χ(x,y,γ)的控制系统,其一般形式为
对式(16)在参考轨迹点进行泰勒展开并忽略高阶项,得到原地转向车辆误差模型为:
为使驾驶员对转向过程中的期望横摆角速度进行实时控制,在MPC 控制器中加入了方向盘转角输入,通过方向盘转角控制原地转向过程中的期望横摆角,以达到驾驶员在环的目的。期望横摆角γr和方向盘角度的关系见式(19),式中δ为驾驶员当前的方向盘转角输入;δmax为最大的方向盘转角,γmax为最大的期望横摆角,此处为2pi;为保证固定方向盘转角输入下的期望横摆角速度不变,即横摆角的误差在固定转角下保持一定,在等式中加入当前时刻的横摆角γ。
同时,考虑原地转向的有效性,车辆的转向半径应足够小,期望的质心偏移量应接近于0,即xr= 0,yr= 0。
利用前向欧拉法对式(17)进行离散化处理。
将位置误差和控制误差整合为一个新的状态量,如式(21)所示。
得到下一时刻关于控制增量的状态空间表达式为[20]:
对得到的基于控制增量的状态空间表达式进行迭代,可得系统未来的预测方程为:
将问题转化为带有控制量极限约束和控制增量约束的二次规划问题[21],如式(24)所示:
式中:Np,Nc分别表示输出预测范围和控制范围,且Np>Nc;ρ为权重因子;ε为松弛因子;Q和R为一定维度的加权矩阵;Δut、Δumin、Δumax分别为t时刻的控制增量和控制增量的上下限;ut、umin、umax为t时刻的控制量及其上下限;目标函数中第1 个总和反映了目标跟踪的期望性能,第2 个总和反映了对控制量的约束。
定义系统输出量参考值为:
为防止车辆侧向加速度过大而产生失稳现象,对期望横摆角速度设置上下限值
对式(24)进行求解,得到控制时域内一系列纵向车速和横摆角速度的控制增量,其第1 个样本Δu*t为实际作用于系统的最佳控制增量,由此得到的当前时刻状态反馈控制律为:
u(t)即为当前时刻为实现车辆原地转向所需的期望车速及期望横摆角速度。
2.1.2 基于PI滑模控制器的横摆力矩决策
设计滑模控制器来计算跟踪上述期望横摆角速度所需的横摆力矩值,滑模控制是一种应用广泛的非线性控制,能处理系统的不确定性[22]。为了提高系统的鲁棒性和跟踪性能,在系统表示中加入了横摆角速度的积分项,设置滑模面函数为:
式中K为滑模面函数参数,对式(28)求导得到:
采用等速趋近律,如式(30)所示。
式中:ζ为趋近律常数,表明系统的状态点以何种速率接近滑模面。
为削弱滑模控制中的抖振现象,用饱和函数sat(s)代替sgn(s),如式(31)所示。
式中:H为边界层厚度。
联立式(28)~(31)以及整车动力学模型,得到附加横摆力矩值为:
2.2 基于二次规划的下层横摆力矩优化分配模型
基于轮胎摩擦圆理论,轮胎与地面接触面内的水平合力总是小于其垂直载荷与摩擦系数的乘积,轮胎的附着率η由式(33)表示[23]。
由于在实际情况下,侧向力不可控,将式(33)简化为:
为使各轮的附着性能得到充分利用,选取轮胎利用率方差和四轮利用率之和最小作为优化目标,如式(35)所示。
式中:ηi为各个轮胎的利用率;ηave为各个轮胎利用率的平均值;λ为优化目标加权系数。
以四轮纵向力为控制量,将式(35)改写成标准二次规划问题形式:
式中:控制量x=[Fx1Fx2Fx3Fx4]T。
引入以下约束条件。
1)等式约束
为使原地转向过程中的质心偏移量较小,其纵向加速度应接近于0,即纵向合力为0,综合考虑横摆力矩的约束,得到转矩分配等式约束为:
2)不等式约束
四轮的驱动力大小主要受轮胎摩檫力和电机所能提供的最大转矩有关,所以有:
式中:i0为减速器减速比,Tlim由式(39)决定:
ni为当前电机转速,nb为电机基速。
采用内点法求解上述二次规划问题,求解各个车轮的最优驱动力,进而得到电机的输出转矩。
3 控制策略仿真验证
为验证所提出的原地转向控制策略的有效性,搭建了dSPACE 硬件在环仿真平台来模拟实车环境,设置路面附着系数为0.85,对不同方向盘转角输入的车辆进行了原地转向仿真测试。
3.1 车辆参数及试验仿真平台
在Matlab/Simulink 软件运行环境内,通过dSPACE 公司ModelDesk 标准化建模工具内置模型库,搭建越野车整车动力学、转向系统、悬架系统、制动系统等模型,并参照实际样车搭载的轮毂电机驱动系统,高压锂电池等多种动力总成部件的输出特性及台架测试数据,构建高精度的执行器模型。为实现精确模拟实际执行器的输出效果与行驶工况,同时有效降低开发成本,将混合动力越野车辆模型烧写至人-车-路闭环车载原型开发系统SCALEXIO制器板卡DS1401内。
利用实时代码生成接口(Real Time Interface,RTI)把前述在Matlab/Simulink 软件环境下设计策略模型自动编译为可定制化处理的实时运行代码,并烧写至快速原型控制器MicroAutoBox2 中的数据处理器板卡DA1006内。在搭载英飞凌TC1782系列芯片作为主控单元的整车控制器中,存储、烧写了C 语言形式的嵌入式代码,进一步通过配置各控制器的CAN 通讯、ADC、PWM 等接口的底层驱动程序,以满足控制策略模型在环与整车控制器硬件在环的测试条件。
在上位机PC 中,通过dSPACE 公司的实时仿真管理软件ControlDesk 对测试闭环中Simulink 模型的控制变量与特征参数进行在线调节,结合仿真动画演示软件MotionDesk 实现高效监控仿真测试过程、试验数据的记录与分析,大幅提升控制模型与控制策略仿真验证的测试效率与可靠性。最后,基于dSPACE 的硬件在环仿真验证平台搭建结果如图5所示。
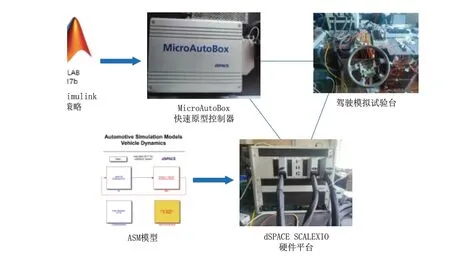
图5 dSPACE硬件在环仿真平台
车辆和轮毂电机总成的主要参数见表1~2。

表1 整车参数
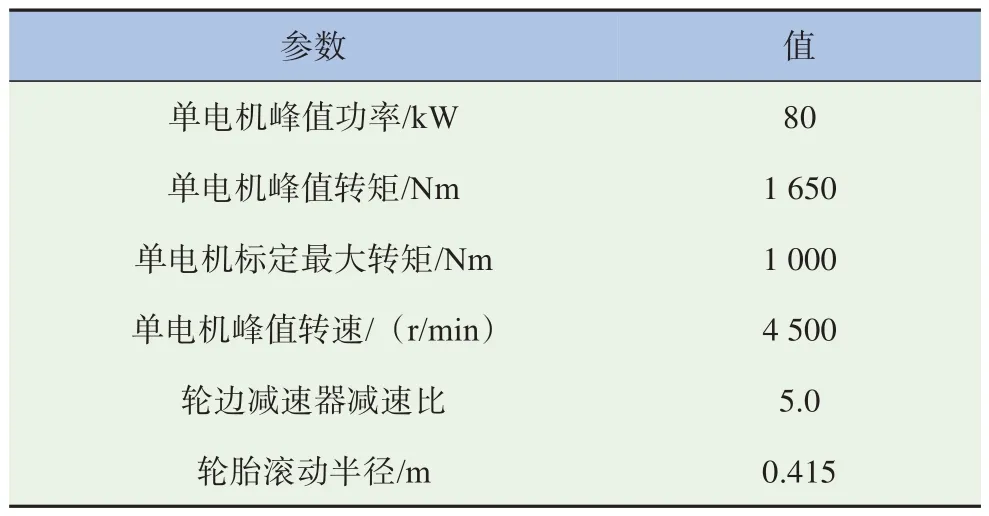
表2 电动轮总成参数表
3.2 方向盘角阶跃输入仿真
图6 为不同方向盘转角阶跃下,车辆原地转向一周的仿真结果图。

图6 方向盘角阶跃输入仿真结果
对整车原地转向过程进行分析,当驾驶员转动方向盘时,MPC控制器根据当前驾驶员意图迅速决策出期望的横摆角速度,PI滑模控制器计算出跟踪所需要的横摆力矩,各电机输出转矩瞬间增大,此时,由两侧轮胎纵向力差形成的驱动力矩大于由侧向力形成的转向阻力矩,车辆出现横摆角加速度,整车进行原地转向,随着横摆角速度接近期望值,各电机转矩降低,直至横摆角速度等于期望横摆角速度,驱动力矩和转向阻力矩平衡,横摆角速度保持稳态不再变化。
阶跃仿真表明,根据图6 中各参数的变化情况,转向初期,电机输出转矩瞬间增大,车轮最大驱动力矩达到4 310 Nm,随着横摆角速度接近期望值,各电机转矩迅速降低,计算得到横摆角速度稳态时,整车的驱动力矩和转向阻力矩为30 182 Nm,同时,采用二次规划的下层转矩分配方法,在实现原地转向功能的同时,以最优的轮胎利用率为目标,对各轮分配转矩进行动态调整。整个原地转向过程符合预期,侧向加速度在较小范围内,在实现原地转向的过程中,并未出现明显失稳情况,且在原地转向过程中,除开始原地转向时略有增大,转向后期的波动不超过0.02,认为是比较稳定的转向过程。各轮转速正常,无失稳现象发生。且期望横摆角速度也是在一定范围内根据质心位置而有较小的波动。经计算,转向中心的偏移量最大为3.446 m,最大转向半径为0.09 m,相比于传统转向极大地提升了车辆的转向机动性。
3.3 方向盘动态输入仿真
动态输入仿真如图7 所示,为方向盘转角连续输入的仿真结果,由图可知,所设计的分层控制器可以根据方向盘转角的变化下决策出不同的期望横摆角速度,并具有较好的跟踪效果。在MPC 横摆角速度决策器加入驾驶员意图后,期望横摆角速度随着驾驶员输入方向盘转角动态变化,驾驶员可以实时对原地转向过程中的横摆角速度进行实时控制。动态仿真表明,其侧向加速度在车辆开始原地转向时略有增大,转向后期的波动小于0.05,也认为是稳定的转向过程,并未出现失稳。相比于阶跃输入仿真,动态输入仿真随着方向盘转角减小,期望横摆角速度下降,各轮转矩从4 000 Nm降低至2 000 Nm,过程中的横摆角速度跟随精确,也未出现失稳,转向过程平稳。整个原地转向过程中,转向中心偏移量最大为2.890 m,比阶跃输入略小,最大转向半径为0.157 m,比阶跃输入的最大转向半径略大,转向轨迹与阶跃输入仿真的原地转向轨迹较为相似,满足车辆在狭小地形进行转向的条件。

图7 方向盘转角连续输入仿真结果
4 结论
1)分析了原地转向时车辆的动力学特性,建立了车辆原地转向运动学模型,研究了原地转向的转向机理,并结合仿真结果进行了转向过程分析。
2)针对原地转向过程中的整车转向中心偏移问题,设计了基于原地转向中心理想轨迹以及期望横摆角速度的模型预测控制算法,从硬件在环仿真结果可知,该算法使整车在方向盘转角动态输入过程中,转向中心偏移量最大为2.890 m,最大转向半径为0.157 m,提高了车辆在狭窄路面下的通过能力。
3)考虑驾驶员在车辆原地转向过程中对车辆转向速度的可控性,在模型预测算法中加入了方向盘转角控制,使车辆可以精确识别驾驶员意图,同时基于PI滑模的横摆力矩跟踪器,可以使车辆横摆角速度快速响应,并在期望的横摆角速度处保持稳态,跟踪效果比较好,整个原地转向过程具有较好的鲁棒性和稳定性,驾驶员可以对原地转向过程中的横摆角速度进行实时控制。由dSPACE 硬件在环仿真试验结果可知,本文控制算法可以稳定且有效地实现车辆原地转向功能,满足越野车辆对高速转向机动性的要求。
