考虑道路因素的智能车辆纵向运动决策与控制研究
2023-12-08周辰雨邝士奇王兴鸿
张 硕, 周辰雨, 李 潇, 邝士奇, 王兴鸿, 高 雄
(长安大学 汽车学院,西安 710064)
汽车智能化已经是汽车发展的主流趋势,是提高行驶安全性、减轻人类驾驶负担、改善乘坐舒适性的重要方式。汽车纵向运动的智能化是智能汽车研究的重要内容之一。在非智能车辆的行驶过程中,驾驶员依据自车车速、主观安全车间距离、与前方车辆的车间距离估计值来决策自车下一时刻的车速。但是,驾驶员通过视觉感知来估计车间距存在误差,文献[1]表明低估车间距离的比例约占38%左右,并且驾驶员易受到疲劳、健康、其他事物的影响,因此,驾驶员的驾驶行为存在安全隐患。智能车辆通过车速传感器、机器视觉和雷达等设备获取自车车速、与前方车辆的相对距离和相对车速等准确信息并进行综合分析判断,实时、科学、合理地决策下一时刻的目标车速并进行相应的车速控制,从而提高车辆的行驶安全性,解放驾驶员对车速的控制。
纵向运动决策和控制包括驱动和制动两部分以及两者的相互切换。CHANG 等[2]设计了自动驾驶汽车跟驰纵向控制模型,其中,切换器运用模糊逻辑选择加速或制动控制,加速控制器和制动控制器采用了自适应控制理论。THANOK 等[3]为了实现理想的跟驰车头时距,使用基于粒子群优化的滑模控制算法设计了节气门开度控制方法,并运用模糊控制算法设计了制动力控制方法。WEIMBMANN等[4]考虑速度限制、道路坡度、行驶时间等信息以及安全相关的约束,提出了一种将模型预测控制和动态规划相结合的能量最优自适应巡航控制方法。MOSER 等[5]为了优化车辆跟随时的油耗,通过前车速度短期预测最优控制,提出了基于实测数据的条件线性高斯模型,设计了基于随机模型预测的自适应巡航控制方法。ZHANG Guoxin等[6]分析熟练驾驶员的驾驶行为,在保证安全舒适的前提下,优化车辆的间距和加速度控制,为驾驶员提供可选择的平滑、舒适、安全、激进的控制模式。BEKIARIS-LIBERIS等[7]设计了一个基于预测的自适应巡航控制系统,用基于名义常数车头时距策略的积分作用补偿车辆系统中执行机构和传感器延迟对车间距感知以及自车速度和短时期望加速度的影响。
由于车辆行驶的道路通常都不是笔直的,车辆在大部分行驶时间内同时具有纵向运动和横向运动,所以车辆纵向运动和横向运动的耦合问题是不可回避的。YUAN Wei等[8]基于前车与自车之间的距离以及前车的横向和纵向速度,利用隐马尔可夫模型建立了前车变道预测模型,设计了目标车辆自适应巡航控制系统的控制算法。ZHANG Junhui等[9]根据交通场景的变化,设计了各子目标权系数的自动调整策略,提出了一种基于模型预测控制框架的多目标协调自适应巡航控制算法。PLESSEN等[10]提出了一种基于通道路径规划器和线性时变模型预测控制器相结合的自适应巡航控制架构。
在决策和控制研究过程中,驾驶员、车辆、交通环境之间的相互作用引起了学者们越来越多的关注。WAN Nianfeng 等[11]设计了基于观测结果的马尔可夫链预测器,和基于不同地点和时间的历史交通速度的最大似然运动预测器,运用启发式方法确定在未来规划范围内前车位置的概率分布,采用机会约束模型预测控制方法对自车的运动进行优化控制。SIMONELLI等[12]提出了一种基于学习机的具有仿人驾驶能力的自适应巡航控制模型,通过不断地模仿驾驶员操作,适应他们的实际驾驶偏好。WANG Jian 等[13]提出了一种基于学习的无人驾驶汽车自适应巡航控制器。它基于各种初始策略控制下的车辆状态转移数据,采用基于核函数的最小二乘策略迭代方法离线优化学习控制模块的动作策略。ROSENFELD 等[14]在现有的自动辅助系统中,基于自适应巡航系统的传感器来学习驾驶员的行为,通过添加驾驶员的统计信息和不同驾驶员类型的模型来开发改进学习模型,允许车辆根据驾驶员的喜好自动调整速度,以保持与前面车辆的预定距离。LI Zhaojian 等[15]认为自适应巡航的目标是保持期望的距离和车头时距,考虑自车的加速度和速度受到安全性、舒适性和燃油经济性的限制,提出了一种训练有效、收敛速度快、性能良好的近似q学习算法,用于自适应巡航控制。
本文根据道路交通环境情况,以车头时距为控制触发事件,将纵向运动决策分为自由行驶行为和跟驰行为,其中跟驰行为根据速度控制方式的不同分为加速跟驰行为、稳定跟驰行为和减速跟驰行为3 种模式。根据车辆动力学原理,考虑路面附着系数,研究适合不同附着系数路面的纵向运动决策与控制方法,从而提高智能车辆在不同附着系数路面上行驶的综合性能,研究框架如图1所示。
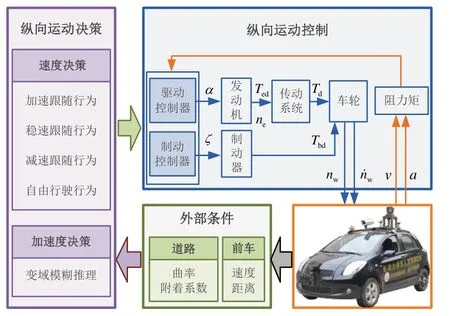
图1 智能车辆纵向运动决策与控制框架
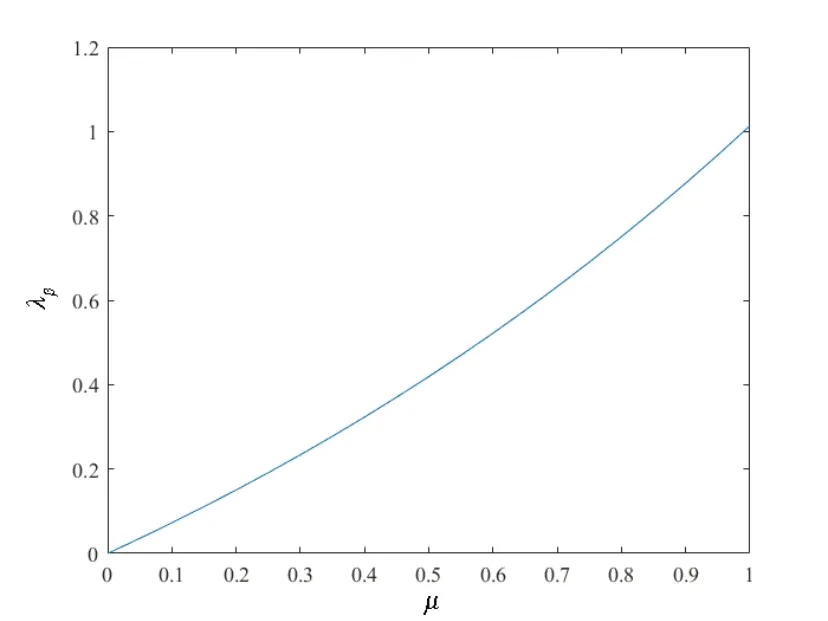
图2 输出论域伸缩因子λβ

图3 输入论域伸缩因子λα
1 车辆纵向动力学模型
智能车辆纵向运动控制的执行系统为发动机和制动系统。本文中发动机的外部执行机构为节气门,制动系统的外部执行机构为制动踏板,因此分别以节气门开度和制动系统的制动踏板行程比例作为纵向运动控制量,建立发动机模型和制动系模型。
1.1 发动机模型
发动机模型包括稳态模型和动态模型。发动机稳态模型是指发动机处于稳定行驶工况时的发动机模型。假设发动机稳态转矩是仅关于发动机转速和节气门开度的非线性函数,建立的发动机稳态模型如式(1)所示。
式中:Tes为发动机稳态转矩;ne为发动机转速;α为节气门开度。
发动机在驱动时通常处于非稳态工况,由于节气门开度角迟滞特性和发动机燃烧特性,需要经过一个动态过程才能输出稳态转矩。因此,在稳态模型中引入发动机的滞后时间和系统延迟时间,建立发动机动态模型,如式(2)所示。
式中:Ted为发动机动态转矩;τ1为发动机的滞后时间;τ2为系统延迟时间。
发动机作为汽车的动力装置,将输出的转矩Ted传递给液力耦合器泵轮,忽略发动机内部摩擦阻力矩,建立发动机转速模型,如式(3)所示。
式中:Thp为液力变矩器泵轮转矩;Je为曲轴转动惯量。
1.2 制动系模型
本文中制动系统型式为液压式制动。制动系统由制动踏板、真空助力器、制动主缸、制动管路、制动器等组成。本文对制动系统进行简化,假设制动强度不超过路面附着系数值,采用一阶线性制动器模型近似地表示制动力矩和制动踏板位移之间的关系,建立了制动系稳态模型,如式(4)所示。
式中:Tbs为稳态制动力矩;κb为制动系制动压力比例系数;Pmax为制动主缸制动压力;ζ为制动踏板行程占制动踏板总行程的百分比。
考虑到制动系中制动液体积和液压管路的变形以及机械机构延迟等影响,在一阶线性制动系稳态模型中引入响应滞后时间和系统延迟时间,建立制动系的动态模型,如式(5)所示。
式中:Tbd为制动系动态转矩;τ3为响应滞后时间;τ4为系统延迟时间。
1.3 纵向动力学模型
车辆行驶过程中以发动机的输出转矩作为驱动动力,经传动系统将其输入到驱动车轮,克服行驶过程中受到滚动阻力、空气阻力、坡度阻力和惯性阻力。在车辆滑行或制动时,节气门处于闭合状态,车辆受到发动机怠速输出转矩、滚动阻力、空气阻力、惯性阻力和制动系制动力的作用减速行驶。根据受力平衡原理,建立车辆驱动纵向动力学模型和制动纵向动力学模型,分别如式(6)~(7)所示。
式中:f为滚动阻力系数;CD为空气阻力系数;A为汽车迎风面积;α为道路坡道角;δm为汽车旋转质量换算系数;G为汽车总重量;m为汽车总质量;η为发动机及传动系统的传动效率;ig为自动变速器传动比;i0为主减速器传动比;其中R为车轮半径;Tei为发动机怠速输出转矩;a为加速度。
3 纵向运动决策
纵向运动是智能车辆控制系统在追求“期望车速”的过程中,依据道路条件、交通中前后相邻两车间的动态间距、自车车速等信息实时调整自车的行驶车速,以保持期望跟驰距离和尽量接近期望车速。
3.1 期望车速最大限值
受到路面附着系数的限制,路面所能提供给驱动车轮的最大驱动力Fxi=Fziμi,其中i为驱动轮序列号,Fzi为驱动轮i的地面垂直反力,μi为驱动轮i所在路面的附着系数。由于驱动过程中车轮打滑会影响车辆行驶的动力性和操纵稳定性,为了在驱动过程中不产生车轮打滑情况,这里取汽车获得的最大驱动力为Fmax= ΣFziμmin,其中μmin为汽车各驱动轮所在路面附着系数的最小值。
假设车辆处于稳定行驶状态,车轮没有侧滑,忽略道路的侧向坡道角,不考虑汽车的侧翻情况,车辆匀速稳定行驶时的最高期望车速如式(8)所示。
式中:vmax_limit为匀速稳定行驶时的最高期望车速;w1为CDA/21.15;w2为G(f+ tanα);r为道路曲率半径;κv为速度系数,由当前路段限速决定。
此外,道路交通条件和汽车乘员舒适度对车速的限制也是车辆行驶期望车速的重要影响因素。文献[16]研究了乘员对不同侧向加速度的感受,发现当侧向加速度值小于等于1.8 m/s2时,乘员对侧向加速度值的感觉不明显,感觉舒适;当侧向加速度值位于(1.8,3.6) m/s2范围时,乘员可以感觉到侧向加速度值,但在这个范围内可以忍受,感觉较舒适。根据JTG D20—2017《公路路线设计规范》[17]规定的设计车速与圆曲线最小半径的一般值和极限值的对应关系,分别计算得到相应的平均侧向加速度为1.16 m/s2和2.05 m/s2,分别位于乘员舒适范围和较舒适范围。为了兼顾智能车辆行驶的时效性、乘坐舒适性和安全性,这里设置质心侧向加速度容许范围为[0,1.8] m/s2。假设理想状态为车辆处于稳态圆周行驶状态,质心侧偏角较小,则确定的曲线行驶时最高车速应为Vcomfort_limit。
式中:ayp为质心侧向加速度;r为圆曲线半径。
对于道路交通条件,主要考虑道路的限速Vtraffic_limit。因此本文所设计的期望车速最大限值为:
3.2 纵向运动目标车速
在文献[18-19]中将车头时距按时间分为危险范围th<0.6 s、危险临界范围0.6 s≤th<1.1 s、正常行驶范围1.1 s≤th≤1.7 s、追赶范围th>1.7 s。本文将车头时距作为划分各种纵向运动的依据,将纵向运动分为:减速跟驰,其车头时距范围为(0,1.1)s;车速保持,其车头时距范围为[1.1,1.7]s;加速跟驰,其车头时距范围为(1.7,5)s;自由行驶,其车头时距范围为[5,+∞)s,对应的纵向运动所采取的驾驶行为分别为减速跟驰行为、稳速跟驰行为、加速跟驰行为、自由行驶行为。
通过分析车辆跟驰行为,期望跟驰距离应包括等速跟驰距离、消除相对速度差所需要的距离、安全停车间距3 部分。等速跟驰距离是等速行驶时前后两车所保持的安全车距,等于期望跟驰车头时距与自车车速的乘积,期望跟驰车头时距选择应能充分体现整个智能车辆的时间响应性能,应大于智能车辆系统响应时间,且越大安全性越好。消除相对速度所需要的距离,基于相邻前车和自车具有相同的制动性能的假设条件下,根据运动学原理和路面附着情况对这部分距离进行相应的设计。停车间距是指两车制动至停车后的停车距离,通常取值范围为2~6 m。跟驰行驶的期望跟驰距离应满足的关系如式(11)所示。
式中:sp为期望跟驰距离;vs为自车车速;vf为当前车道相邻前车车速;th为期望跟驰车头时距,即车速保持车头时距;b0为期望停车距离;L0为前车车长;amax为自车可采取最大减速度,选取与地面附着系数相关,为了汽车获得良好的制动性能和操纵性能,这里根据4 个车轮接触的地面附着系数的最小值μmin来确定;αs为修正系数,当vf-vs≥0时αs为0,当vf-vs<0时αs为1。
将自车与前车的实时车头时距tht作为跟驰行为的决策依据,建立车辆跟驰行为的目标车速模型,包括加速跟驰行为目标车速模型、减速跟驰行为目标车速模型、稳速跟驰行为目标车速模型,其中st为实时车间距。
1)加速跟驰行为目标车速模型
当车间距大于期望跟驰距离时,即tht>1.7 s时,为了能以期望车速或接近期望车速的车速行驶,自车采取加速跟驰行为。由于车辆在道路上行驶,自车还受到交通条件和道路条件的限制,行驶车速应小于等于期望车速最大限值。因此,引入加速跟驰目标车头时距th1,令th1=1.1 s,所设计的加速跟驰行为目标车速模型如式(12)所示。
2)减速跟驰行为目标车速模型
当车间距小于期望跟驰距离时,即tht<1.1 s时,车速受到相邻前车车速的限制,为了避免两车碰撞,应采取减速跟驰行为。引入减速跟驰目标车头时距th2,令th2=1.7 s,则减速跟驰行为目标车速模型如式(13)所示。
3)稳速跟驰行为目标车速模型
自车与前车的车间距离位于期望跟驰距离范围内时,即tht∈[1.1,1.7]s 时,无论车速高于或低于相邻前车车速多少,均保持车速不变,直到车头时距超出期望范围后,再采取加速跟驰或减速跟驰行为,即稳定跟驰行为目标车速为当前车速。
3.3 纵向运动目标加速度
由于行驶过程中道路路面的附着系数是时变的,例如途径涉水路面、冰雪路面、泥泞路面等,这些路面的附着系数较低,在车辆进行车速控制时,车轮的驱动力或制动力超过路面所能提供的附着力时,就会出现驱动滑转或制动抱死的情况,同时使侧向附着能力急剧降低,出现车辆行驶的不稳定情况,因此再设计控制器时应充分考虑路面附着系数对速度控制的影响。为了使车辆纵向力小于等于附着力,则应纵向加速度amax≤μg。
本文为了保证每个车轮均处于附着椭圆所确定稳定区域内,选取4 个附着系数中的最小值作为控制决策中的参考路面附着系数, 即μref=min(μ1,μ2,μ3,μ4),将μrefg的值作为控制策略中的最大加速度amax。本文基于变论域模糊推理方法来设计合理的纵向运动目标加速度模型。
3.3.1 模糊推理论域
根据目前公路的限速和道路附着系数,将当前速度vs、目标速度与当前速度的偏差ev和目标加速度ap的论域分别初始设定为Iv=[0,120]、Iev=[-60,60]、Oa=[-9.8,9.8]。vs的模糊子集为{ZO,L,M,H},ev的模糊子集为{NB,NS,ZO,PS,PB},ap的模糊子集为{NB,NS,ZO,PS,PB},vs、ev、ap均采用梯形和三角形的组合隶属度函数进行模糊化处理。
3.3.2 论域伸缩因子
对于输出论域,路面附着系数直接决定着汽车能达到的最大加速度,论域应能保证目标加速度与道路路面条件相适应,不出现驱动滑转和制动抱死的情况,因此输出论域伸缩因子λβ设计为路面附着系数的函数,如式(14)所示。
在输出论域可变的前提下,输入论域的确定应综合考虑输出论域与输入论域的关联性。为了使汽车在不同道路上行驶均具有较好的动力性、制动性、操纵稳定性,设计输入论域的伸缩因子λα随着附着系数的降低而降低,以获得在路面提供附着能力范围内的较大的速度控制能力,在采用收缩后输出论域内的“粗”调,不会因为路面附着系数降低而出现汽车无法安全稳定高效的行驶。λα随着附着系数的升高而升高,可以在伸张后输出论域内实现“细”调,提高行驶过程中的舒适性。λα随车速的增加而增加,应该通过“细”调的方式,以较小的加速度进行控制,进一步保证汽车加速和加速过程中的行驶稳定性。因此,输入论域伸缩因子λα设计为与路面附着系数和车速相关的函数,如式(15)所示。
在确定输出论域伸缩因子λβ和输入论域伸缩因子λα后,当前速度vs、目标速度与当前速度的偏差ev和目标加速度ap的论域分别为Iv=λα[0,120]、Iev=λα[-60,60]、Oa=λβ[-9.8,9.8]。
3.3.3 模糊推理规则
变论域的模糊推理方法依据驾驶人的驾驶经验制定模糊推理规则,确定纵向目标加速度。本文采用Mamdani控制规则进行模糊推理,见表1。最后,运用重心法去模糊化得到目标加速度值ap。
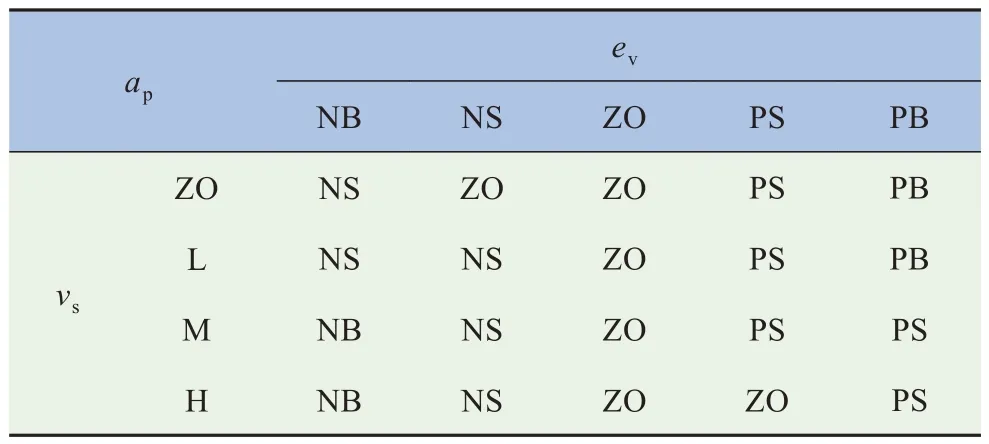
表1 目标加速度模糊推理表
4 纵向运动控制
本文将纵向运动控制分为驱动模式和制动模式,以发动机节气门开度和制动系统的制动踏板行程比例作为纵向运动控制量,分别由驱动控制器和制动控制器控制,并由模式切换决策器实现两个模式的切换。
4.1 驱动模式控制
驱动模式控制是指通过调节节气门开度,当目标车速大于等于当前车速时,控制发动机转矩和转速,消除速度偏差,实现以目标速度行驶。依据发动机稳态输出转矩曲线,通过反向查表求出与发动机转速和转矩对应的节气门开度。因此,驱动控制器可以根据当前车速vs和加速度v̇s、目标车速vp和目标加速度v̇p计算出合理的节气门开度。
根据驱动控制思路,基于驱动纵向动力学模型,考虑参数和干扰不确定性,忽略发动机输出延时,设计驱动被控系统如式(16)所示。
式中:w(vp,t)为参数和干扰不确定项。
针对被控系统设计基于自适应反演滑模控制算法的驱动控制器,令u=Tes为系统的控制量。定义速度误差为e1=vs-vp,定义Lyapunov 函数为了实现≤0,取虚拟控制e2=̇ -+c1e1,其中c1>0。
选取切换函数为:s=k1e1+e2。假设参数和干扰不确定项变化缓慢,̂为w的估计值,其估计误差=w-̂,设 计 自 适 应 律 为= -ρ1s。定 义Lyapunov 函数设计的驱动控制器如式(17)所示。
驱动控制器的控制量即为发动机稳态转矩Tes,通过发动机稳态转矩的逆函数可以获得节气门开度αp,如式(19)所示。
4.2 制动模式控制
当目标车速小于当前车速时,制动模式控制通过调节制动踏板位置,产生制动力矩,消除速度偏差,实现以目标速度行驶。制动力矩的大小通过制动踏板的行程进行控制。制动控制器可以根据当前车速vs和加速度v̇s、目标车速vp和目标加速度v̇p以及发动机怠速输出转矩,确定适合的制动踏板行程比例。
根据制动控制思路,基于制动纵向动力学模型,考虑参数和干扰不确定性,忽略制动系统输出延时,设计制动被控系统如式(20)所示。
式中:d(vp,t)为参数和干扰不确定项。
针对制动被控系统设计基于自适应反演滑模控制算法的制动控制器,令u=Tbs为系统的控制量。定义速度误差为e3=vs-vp,定义Lyapunov 函数为了实现≤0,取虚拟控制e4=-+c2e3,其中c2>0。
选取切换函数为:s=k2e3+e4。假设参数和干扰不确定项变化缓慢,̂为d的估计值,其估计误差͂=d-̂,设 计 自 适 应 律 为̇= -ρ2s。定 义Lyapunov 函数设计的制动控制器如式(21)所示。
因为制动控制器的控制量为制动系统稳态转矩Tbs,再通过式(23)可以获得制动踏板行程占制动踏板总行程的百分比。
4.3 模式切换决策
在纵向运动控制过程中,根据目标车速和当前速度的偏差,选择驱动模式还是制动模式。模式切换应满足要求:平缓地实现驱动模式和制动模式的切换;避免驱动模式和制动模式的频繁切换;避免同时进行两种模式的操作。
驱动模式是由节气门控制发动机输出转矩,克服各种阻力,驱动车轮产生转速,从而带动车辆产生车速和加速度。但在行驶车速高于怠速车速的情况下,当节气门开度很小或关闭时,发动机处于怠速状态,输出转矩很小,甚至出现发动机倒拖车辆的现象,这就使发动机输出转矩无法克服行驶阻力驱动车辆沿轨迹匀速或加速滑行,产生怠速加速度,车辆进行减速运动。通过进行前进挡滑行试验获得滑行加速度与车速的关系式,如式(24)所示。
由于怠速加速度的存在,使通过控制节气门也可以获得一定的负加速度,所以将怠速加速度作为驱动模式和制动模式的切换临界值。为进一步避免两个模式间的频繁切换,设计切换间歇区域,设2ξg作为该区域幅值,ξg取值为0.1 m/s2,模式切换决策采用目标加速度与滑行加速度的关系式表示,设计模式切换决策器策略如式(25)所示。
式中:ah为滑行加速度。
5 仿真结果分析
为了验证本文研究的纵向运动决策和控制方法,选择高附着系数路面和低附着系数路面两个直线行驶工况进行仿真试验,并以反演控制算法作为对比控制算法。
5.1 高附着系数路面行驶工况
仿真路面选取附着系数为0.7 的干沥青路面,前车初始车速为60 km/h,其车速变化曲线如图4所示,自车初始速度为40 km/h,两车初始车间距为30 m。
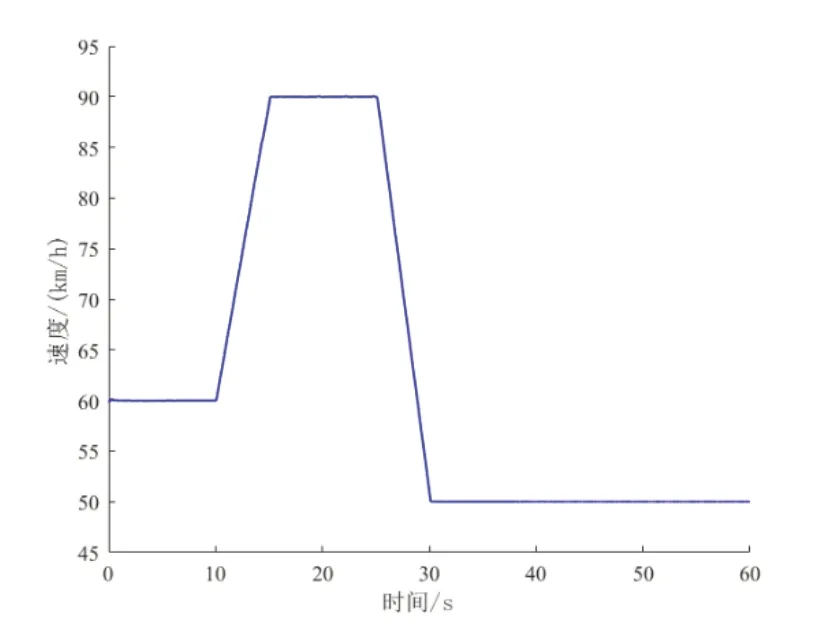
图4 前车车速变化曲线
自车纵向运动速度和加速度变化曲线如图5~8所示,其中图5 和图6 为反演控制(简写为BC)的自车速度和加速度变化曲线,图7 和图8 为自适应反演滑模控制(简写为BSMC)的自车速度和加速度变化曲线。
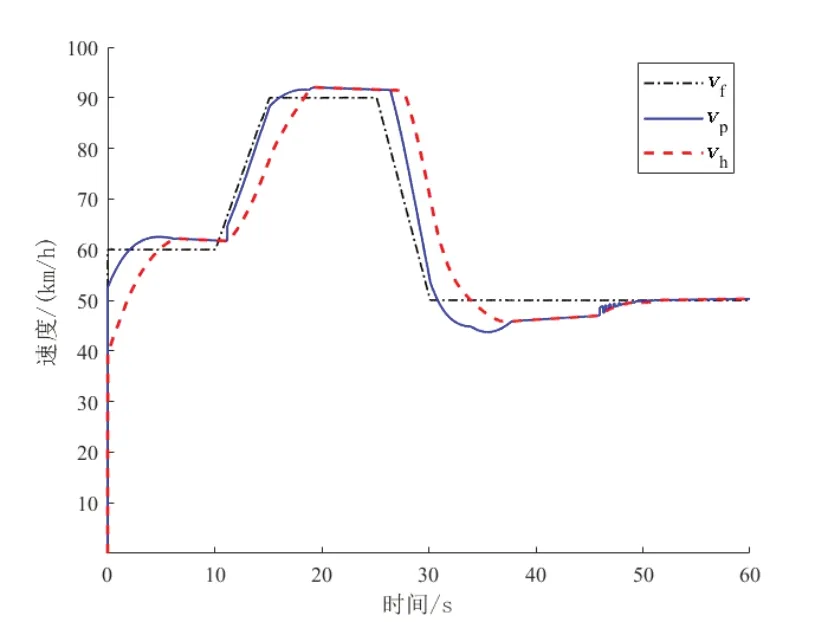
图5 BC控制的自车行驶速度
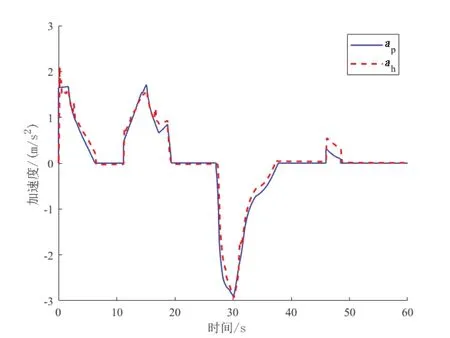
图6 BC控制的自车行驶加速度

图8 BSMC控制的自车行驶加速度
由图5 和图7 可知,根据前车车速、自车车速和路面附着系数,获取了合理目标车速曲线,在自车车速较低、车头时距较大时,采用加速跟驰行为,目标车速高于前车车速,在前车车速增加时,目标车速能很好地跟随前车车速。在前车车速大幅下降时,自车采用减速跟驰行为,目标车速能迅速下降,进行减速增距,保持安全距离,最终目标车速与前车车速达到稳定一致,自车采用稳速跟驰行为。
由图6 和图8 可知,通过变论域模糊推理,根据当前车速、目标速度与当前速度的偏差和路面附着系数可以得到合理的目标加速度,在保证行驶安全的同时,保证行驶过程中车轮不会出现滑转或抱死,在高附着系数路面时细调目标加速度,充分保证乘员的舒适性。
由图5~8 可知,在高附着系数路面上直线行驶时,反演控制算法和自适应反演滑模控制算法的控制差异性较小,均能使自车车速和加速度很好地跟随目标车速和目标加速度。图9 中车头时距和车间距曲线能反映自车跟驰过程中纵向运动决策的合理性,在前车紧急减速时,均能避免事故发生。在45 s 后,由于车头时距位于[1.1,1.7]s 范围内,因此自车采用稳速跟驰行为。

图9 纵向运动时的车头时距和车间距
5.2 低附着系数路面行驶工况
仿真路面选取附着系数为0.3 的湿沥青路面,前车初始车速为30 km/h,其车速变化曲线如图10所示,自车初始速度为20 km/h,两车初始车间距为18 m。

图10 前车车速变化曲线
自车纵向运动速度和加速度变化曲线如图11~14 所示,其中图11~12 为反演控制的自车速度和加速度变化曲线,图13~14 为自适应反演滑模控制的自车速度和加速度变化曲线。
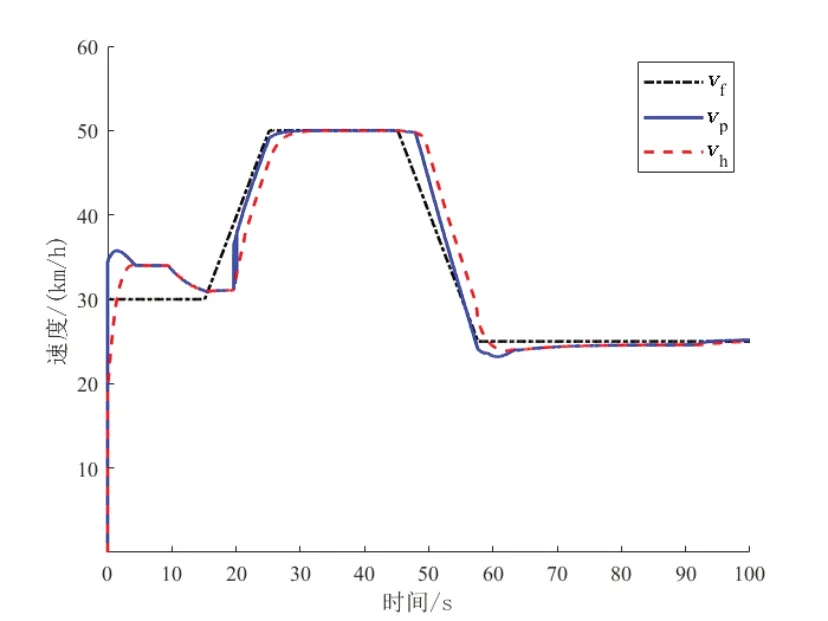
图11 BC控制的自车行驶速度
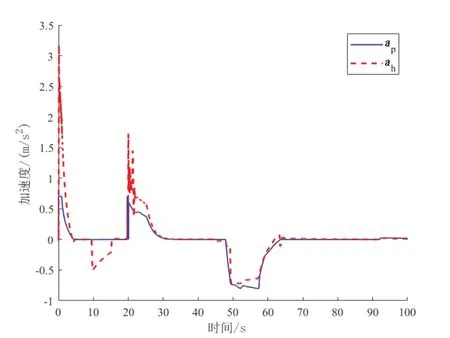
图12 BC控制的自车行驶加速度

图13 BSMC控制的自车行驶速度

图14 BSMC控制的自车行驶加速度
由图11~12 可知,在低附着系数路面行驶工况中,反演控制的自车加速度跟踪出现了较大的超调量,尤其是在控制初期,峰值超过了2.94 m/s2,此时易出现驱动打滑情况。由图13~14 可知,自适应反演滑模控制的自车速度和加速度整体跟踪情况较好。由图15 可知,自车能很好地执行纵向运动决策,在低附着系数路面时粗调目标加速度,在附着条件允许的情况下,保证行驶安全性和行驶效率;反演控制的过程中最小车头时距小于0.6 s,此时处于危险跟驰情况;自适应反演滑模控制的自车行驶安全性好,并能通过车速调节实现与前车等速、较小车头时距和较小跟驰距离的稳速跟驰行为。

图15 纵向运动时的车头时距和车间距
6 结论
本文主要研究考虑道路交通环境的智能车辆纵向运动决策与控制问题,通过设计决策模型、控制算法实现了智能车辆安全、高效、稳定的纵向运动性能。主要研究结论如下。
1)通过分析纵向运动的影响因素,设计了期望最高车速模型,分析了不同纵向驾驶行为,基于车头时距建立了纵向运动决策方法,并设计了相应的目标速度模型,提出了运用变论域模糊推理目标加速度的方法。
2)基于车辆纵向动力学模型,考虑参数和干扰的不确定性问题,运用自适应反演滑模控制算法分别设计了驱动控制器和制动控制器,并设计了模式切换决策器。
3)选择高附着系数路面和低附着系数路面直线行驶工况进行仿真试验,并以反演控制算法进行对比。仿真结果表明,根据路面附着系数和车头时距,纵向运动决策方法能确定合理的目标车速和目标加速度,通过纵向运动控制器控制,保证智能车辆能安全、高效、稳定地跟驰前方车辆。
本文研究为智能车辆纵向运动决策与控制提供了研究基础。在后续研究中,可增加智能车辆的道路实车试验,综合考虑环境感知、运动决策、控制执行等环节对实车纵向运动的影响,进一步优化相关方法,以提高方法的实际应用价值。
