基于长短期记忆神经网络与注意力机制的智能汽车分车型跟驰模型
2023-12-08柏海舰王昌胜陈星宇过晨晨
柏海舰, 孙 婷, 丁 恒, 王昌胜, 陈星宇, 过晨晨, 李 亚
(合肥工业大学 汽车与交通工程学院,合肥 230009)
在高速公路、普通公路及城市外围道路上,车辆类型较复杂,各类货车、客车组成了具有随机车型序列[1]的跟驰车流。由于行驶规则、车辆性能、载货特征及视距影响等原因,不同类型的前车对后车的跟车行为存在明显的影响。图1~3 展示了下一 代 交 通 仿 真 (Next Generation Simulation,NGSIM)小型车跟驰小型车(CC)与小型车跟驰大型车(CT)的跟车数据的统计分析:前车是大型车时,后车驾驶行为会更加保守,选择较大的跟车间距;当前车为小型车时,后车跟车间距则整体偏小。虽然两种场景下前后车相对速度分布差异不大,但当前车为大型车时,后车的加速度变化范围更小,驾驶更谨慎。从经验的角度出发,当前方为大型车时,驾驶员选择适当保守和谨慎的驾驶策略,无疑也是更安全的。

图1 车头间距对比

图2 相对速度对比

图3 后车加速度对比
跟驰模型大体可以分为两大类:理论驱动模型和数据驱动模型。前者通过数学方法描述跟驰过程中的速度、加速度、车头间距、相对速度等之间的函数关系,如Gipps 模型[2]、全速度差模型[3]、智能驾驶员模型[4]等经典刺激—反应模型。但随着人工智能相关理论的发展,数据驱动类跟驰模型近几年得到了较多的关注,如误差反向传播神经网络(Back Propagation Neural Network,BPNN)、循环神经网络(Recurrent Neural Network,RNN)以及LSTM 神经网络训练的跟驰模型等。BPNN 模型[5]最早应用于跟驰模型建模,后车速度和两车之间的距离作为模型输入,以两车之间的相对速度作为模型的输出,测试效果较好,但该模型只考虑了跟驰车辆之间的瞬时状态,未考虑前置状态对当前状态的影响。RNN 模型[6]是一种考虑驾驶员驾驶记忆的神经网络,以车辆位置和速度作为输入参数,获得最佳的安全距离,但输入序列较长时,会出现梯度消失和梯度爆炸的问题。为了解决梯度问题,同时考虑驾驶行为的连续时间序列特征,采用LSTM神经网络[7]训练跟驰模型,能较好地捕捉到非对称驾驶行为。
在场景分类方面,有学者通过设置不同车长和最大行驶速度区分不同类型的车辆进行交通流仿真,能模拟真实的交通流,但不能准确反映不同车型组合的跟驰特性[8-9]。在传统跟驰模型的研究中,将车型作为车辆的个体特征加入传统的跟驰模型中,能提高模型预测精度。敬明等[10]将反应时间和车型作为车辆的个体特征加入IDM 跟驰模型中,能体现交通系统的随机性和异质流特征;任胜利等[11]基于FVD 模型,引入反映驾驶员个体特征的车头时距系数和反映车辆特征的跟车类型系数、车身长度参数,能较好地描述不同车型跟驰特征;SAIDI S等[12]通过对不同车型所产生的加速和减速等不同运动状态的刺激反应分别建立单一模型,探讨了混合车流刺激反应的车辆跟驰模型。基于深度学习的跟驰模型大多都是以性能或类型相同的跟驰车辆[13]作为研究对象,忽视了车型对跟驰模型的影响。有学者考虑现有模型的局限性,针对拥挤情况下的大型车开发了一种跟驰模型,采用局部线性模型树方法将人类感知缺陷纳入汽车跟踪模型,将大型车与小型车的跟驰行为分开进行预测,模型预测效果较好,但并未考虑所有的跟驰类型[14]。
在复杂的交通场景下,智能汽车可以获取周围车辆信息和自身状态[15-17],为了提高智能汽车跟驰行为决策的灵活性,智能汽车需要根据前车的车型差异,选择不同的跟驰行为,从而应对更加复杂的场景。本文基于NGSIM 数据集,将前车车型分为大型车和小型车,通过筛选、平滑建立分车型的跟驰轨迹数据集,将车型组合编码作为模型的一个输入;为了进一步提高模型预测的可解释性,引入注意力机制来充分挖掘模型输入特性,并与考虑时序特征的长短时记忆网络结合,提出一种根据前车车型产生不同跟驰行为的IVT-CF 模型,使智能汽车学习人类驾驶员在前车为大型车或小型车情景下小型车的跟驰行为。并通过仿真测试,验证IVT-CF模型的跟驰性能。
1 IVT-CF神经网络模型
1.1 输入和输出
跟驰行为是在不能超车的单一车道上,车辆列队行驶时,后车跟随前车的行驶状态。智能汽车能实时获取前车的位置信息、速度信息,对驾驶行为作出更加准确的预测。在智能汽车跟驰模型的研究中,众多学者认为后车的跟驰行为主要与前后车之间的车头间距、相对速度以及后车速度有关[18],车头时距、前车加速度等虽然也是跟驰模型中常用的变量,但试验证明这些参数无法提高模型的效果,所以不予以考虑[19]。在智能汽车跟驰模型的研究中通常剔除大型车的跟驰数据[20],基于此本文将车型特征作为模型的1 个输入,使智能汽车能根据前车车型选择适宜的跟驰行为,提高智能汽车跟驰行为的预测精度。
车型特征属于离散变量,需要对车型特征进行编码处理,用于模型训练。为了避免使用有序型数值编码造成数据在模型训练中产生的优劣性问题,使用One-Hot 独热编码对车型特征进行离散化处理,小型车跟驰小型车(CC)编码构造为(10),小型车跟驰大型车(CT)编码构造为(01)。本文采用前后两车的车头间距、相对速度、后车速度与车型组合编码作为模型的输入,后车的加速度作为模型的输出。
1.2 总体架构
IVT-CF 模型总体架构如图4 所示,主要由注意力模块、LSTM神经网络和1个全连接层构成。
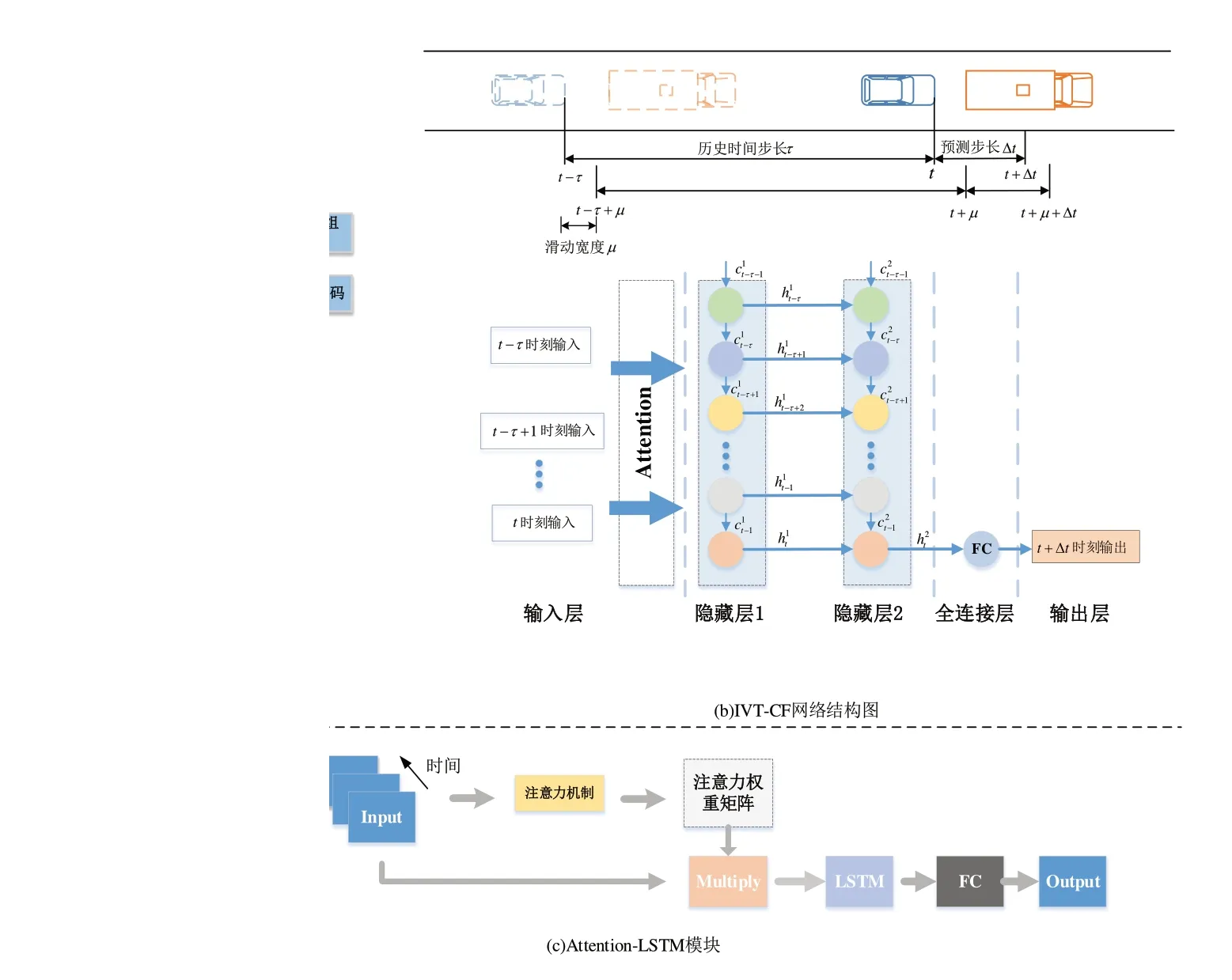
图4 IVT-CF模型框架
1.2.1 注意力模块
注意力机制是机器学习模型中嵌入的一种特殊结构,可以用来学习和计算输入数据对于输出数据贡献的权重[21]。注意力机制能根据数据输入,计算不同时刻各个特征值的权重,通过不断学习优化,提取输入特征中的关键信息,与输出相关度更高的输入特征获得更大的权重,以较低的权重忽视相关度更小的输入,进一步优化LSTM 神经网络的输入,提高神经网络模型的可解释性。注意力机制的计算公式如式(1)~(4)所示:
式中:Wi为权重系数;Xj为j时刻输入向量;bi是偏重量;eij表示j时刻输入向量进行tanh 函数非线性转换后的向量。
使用softmax 函数对中ej进行归一化处理,得到归一化后的注意力系数矩阵αj,αj计算如式(2)所示。
式中:em为随机初始化的注意力权重矩阵。
注意力机制的输出特征s为注意力系数矩阵与输入向量乘积的累加和,如式(3)所示:
输入向量不同关注度的输出序列如式(4)所示,作为LSTM神经网络的输入。
1.2.2 LSTM神经网络
LSTM 能处理时序特征的数据,使用LSTM 训练模型能充分学习训练数据中的长期依赖关系。LSTM 以注意力模块输出的样本Fj与初始化的h0、c0作为输入,之后的LSTM 层以上一层LSTM 的输出h代替Fj,与上一时刻同层次的h、c输入进行计算,LSTM层的输出结果如式(5)~(12)所示。
遗忘门为:
输入门为:
存储单元为:
输出门为:
式 中:hj为LSTM 隐 藏 层 状 态 向 量;WfF,Wfh,WfC,WiF,Wih,WiC,WCF,WCh,WoF,Woh,Woc,Who为权 重;⊗为Hadamaed 积;bf,bi,bC,bo,bh为 偏 置 项;σ(·)为Sigmoid激活函数;tanh (·)为双曲切函数。
1.2.3 全连接层
使用LSTM 神经网络进行预测可以分为一对一、多对一、多对多的预测。一对一预测结构为一个序列输入对应一个序列输出,多对多预测结构为多个序列输入对应多个序列输出,多对一预测结构为多个序列输入对应一个序列输出。本文采用多对一的预测结构,通过全连接层对LSTM 神经网络的输出进行非线性变换,将多维数据输出映射到一维数据,最终得到IVT-CF 模型输出结果Yj,如式(13)所示。
2 仿真测试
2.1 训练和测试数据准备
NGSIM 数据集是美国公路局共享的车辆轨迹数据。该数据集以每秒10帧的速率记录了车辆的连续轨迹,并提供了车辆类型、横向和纵向位置信息等。本文提取I-80数据集中04:00~04:15 p.m.时间段中小型车跟驰小型车(CC)、小型车跟驰大型车(CT)的跟驰数据训练IVT-CF模型,使智能汽车能根据前车车型对自身跟驰行为做出精准预测。数据集的采样间隔为0.1 s,即每秒钟可产生10 个跟驰状态的样本数据。本文使用滑动时间窗的方法提取连续的车辆跟驰特征数据,用宽度为μ= 0.1 s、历史时间步长为τ= 10 s 的滑动时间窗对跟驰车辆的车头间距、相对速度、后车速度和后车加速度进行连续采样。模型训练测试样本数与跟驰车辆轨迹数见表1。

表1 跟驰车对数量与样本数
由于NGSIM 数据集中的车辆位置信息存在一些异常值和测量误差[22],当进行一阶导数、二阶导数计算,会产生超过车辆性能或人体不能承受的不合理速度和加速度值,所以需要对数据进行平滑处理。本文使用对称指数滑动平均法[23]进行轨迹数据平滑,通过一阶差分和二阶差分获得车辆的速度与加速度。平滑处理后的数据如图5所示。
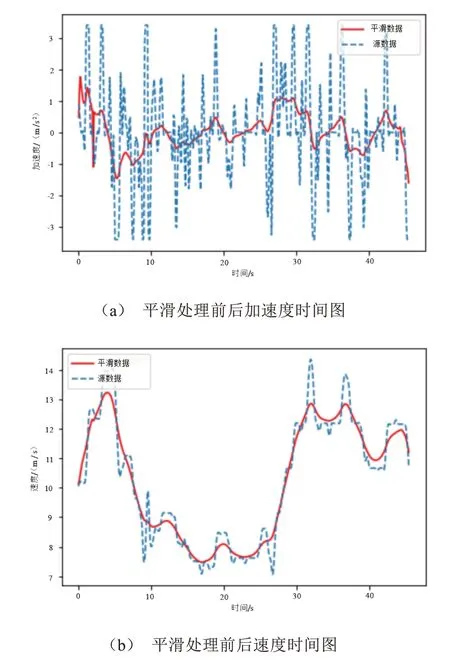
图5 数据平滑处理
2.2 参数标定与训练
为了验证IVT-CF 模型对于不同前车车型的跟驰性能,将IVT-CF模型与不考虑前车车型的LSTM模型、IDM模型进行仿真测试对比。
本文将小型车跟驰小型车与小型车跟驰大型车的跟驰样本按照1∶1 的比例进行混合,其中80%数据用于训练,20%数据用于测试和调整IVT-CF 模型参数。有学者[24]在基于深度学习的跟驰模型中发现,无论何种模型结构,10 s 的历史时间步长是最佳选择,因此,本文选用10 s 的历史数据输入。利用早停算法在测试集损失函数连续10 次出现下降时,停止训练。
通过对IVT-CF 模型进行测试与调整,参数设置见表2。IVT-CF 模型训练集与测试集的损失函数如图6 所示,模型训练集和测试集的误差基本一致且相近,模型学习到输入样本的规律,具有较强的泛化能力。图7 为模型输入的注意力权重分布值,样本1 为小型车跟驰小型车的训练样本,样本2 为小型车跟驰大型车的训练样本。模型能根据不同训练样本对模型输入分配不同的权重,车型组合编码对模型输出的影响虽然比间距和速度小,但差异并不大,且比较明显,因此,在跟驰学习模型中考虑车型的影响是必要的。
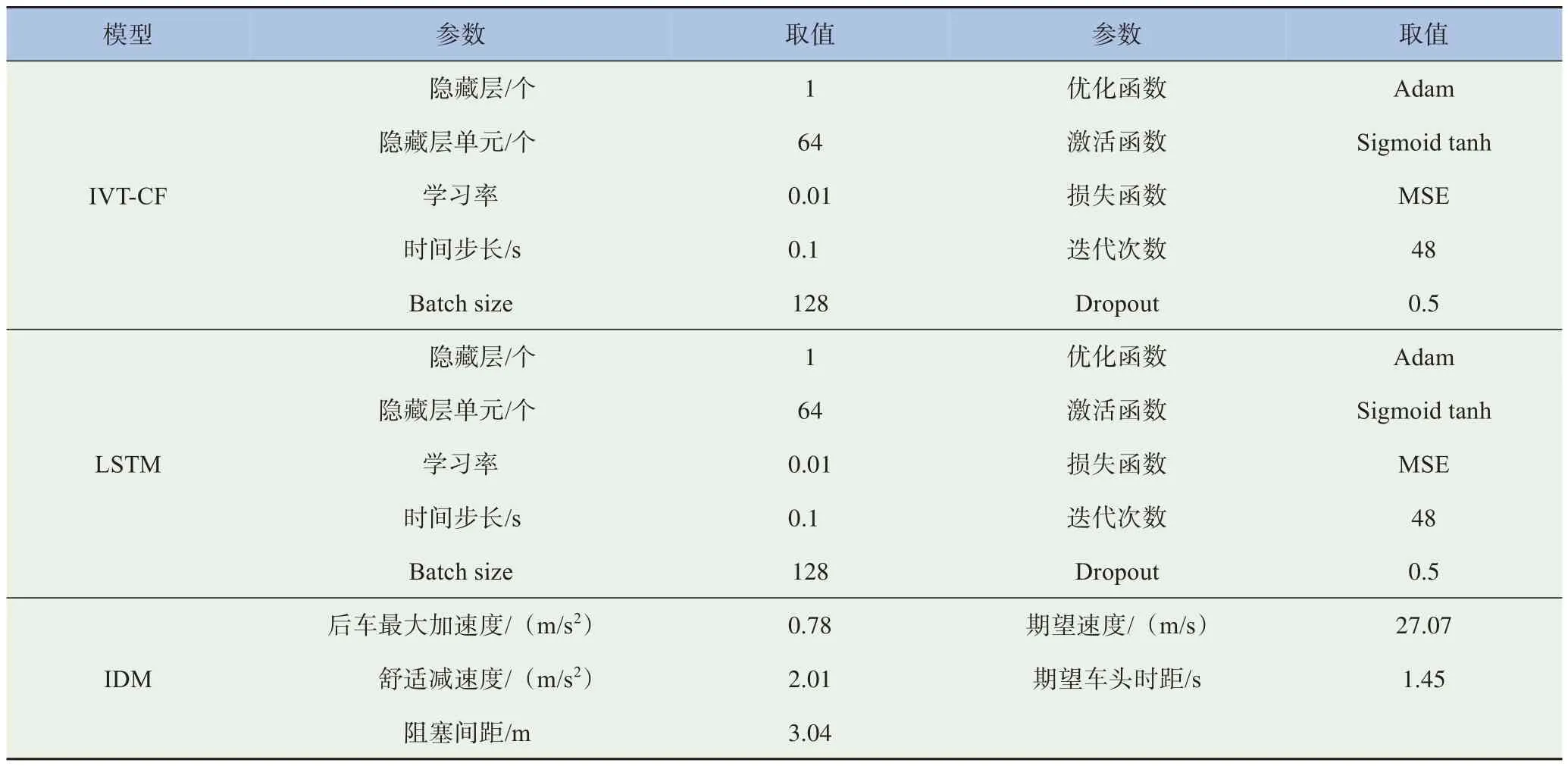
表2 模型的参数设置
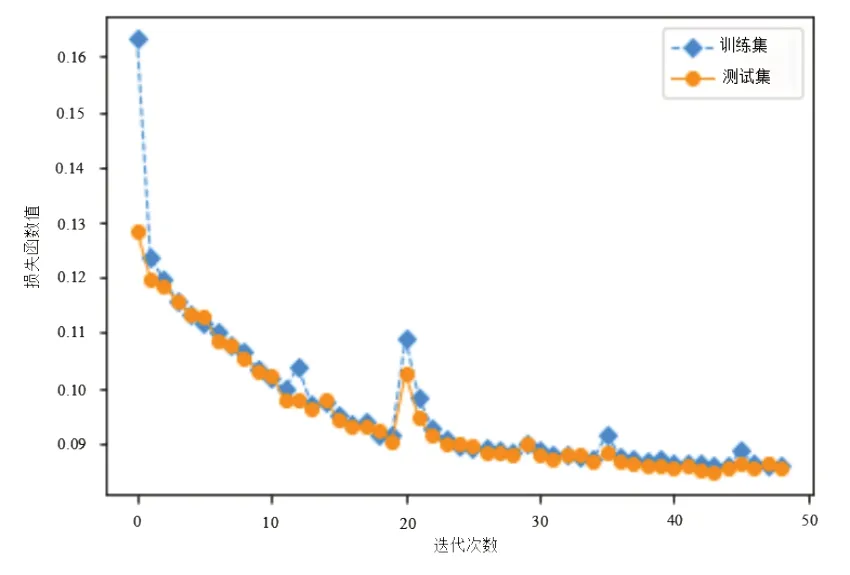
图6 模型训练集与测试集的损失函数值
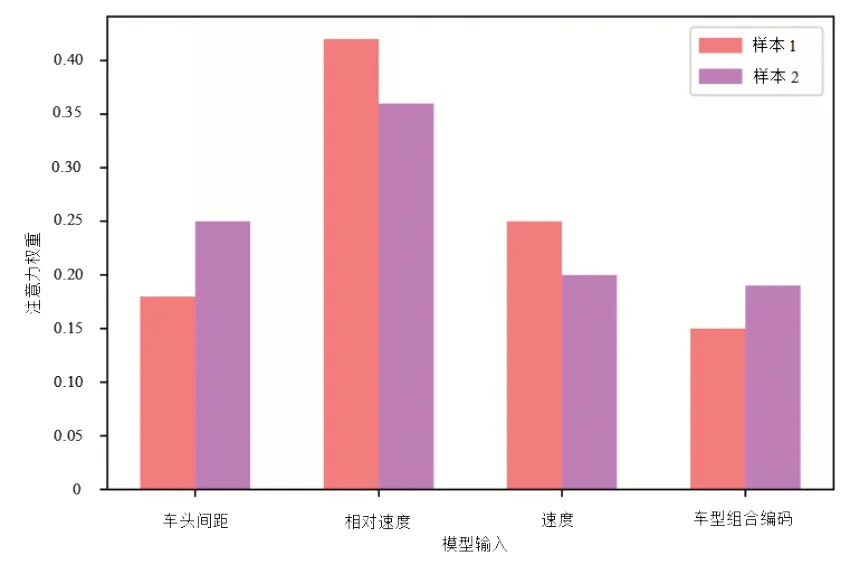
图7 模型输入注意力权重分布值
LSTM 模型输入为车头间距、相对速度与后车速度,输出为后车加速度,训练方法、参数设置与IVT-CF模型相同。
IDM 模型能较好地反映驾驶员的驾驶特性[25],本文使用遗传算法[26]对IDM 模型进行标定,与IVT-CF 模型跟驰性能进行对比,得到IDM 模型的参数设置见表2。
2.3 情景测试
2.3.1 单车跟驰仿真精度测试
为了验证IVT-CF 模型能否适用于不同车辆类型的前车,本文选择小型车跟驰小型车与小型车跟驰大型车两种不同车型组合跟驰数据进行轨迹还原仿真试验。使用前τ时间步长的车头间距、相对速度、后车速度、车型组合编码,预测τ+ Δt的后车加速度,据此得到该步长的速度、位移,计算得到与前车的车头间距、相对速度;剔除第1 个时间步的车头间距、相对速度、后车速度、车型组合编码,加入预测得到车头间距、相对速度、后车速度与车型组合编码,继续预测下一个步长的后车加速度等;不断迭代,可得到后车完整跟驰数据,轨迹还原仿真如式(14)~(18)所示。
均方误差(MSE)为反映预测值与真实值之间差异程度的一种度量,MSE值越小,模型仿真精度越高,学习效果越好。MSE计算公式如式(19)所示。本文使用模型仿真得到的速度、位移和跟驰数据中后车真实速度和位移之间的MSE 评价IVT-CF模型、不考虑车型的LSTM 模型与IDM 模型的仿真结果。
式中:an(t+ Δt)为t+ Δt时刻后车预测加速度;vn-1(t)为t时刻前车的速度;vn(t)t为时刻后车的速度;xn-1(t)为t时刻前车沿车辆前进方向的位移;xn(t)为t时刻后车沿车道前进方向的位移;Δxn(t)为t时刻前后两车的车头间距;Δvn(t)为t时刻前、后两车的相对速度;fIVT-Cf(·)为输入输出变量映射关系的函数;τ为历史时间步长;Δt为IVT-CF 模型的更新时间步长,为0.1 s;N为训练集的样本数量;xon(t)为后车在时间t的真实位移值。
仿真车辆是在I-80 数据集中随机选择的,小型车跟驰小型车的车辆编号为(222,234),小型车跟驰大型车的车辆编号为(1767,1785)。IVT-CF模型在不同车型组合仿真得到的车头间距、速度、加速度统计结果见表3,在小型车跟驰大型车的场景中,该模型仿真得到的平均车头间距远大于小型车跟驰小型车的场景,但仿真得到的平均速度仅比小型车跟驰小型车场景中仿真得到的平均速度高3.06%。在小型车跟驰大型车的场景中,该模型仿真得到的后车行为更加保守。

表3 IVT-CF模型仿真结果
图8 与图9 分别展示了小型车跟驰小型车与小型车跟驰大型车在不同模型下的加速度、车头间距、速度与位移仿真结果,从图中可以看出IVTCF 模型可以根据前车车型调整跟驰行为,与现实情况更相符,仿真得到的加速度、速度与位移结果更加贴近真实值。

图8 小型车跟驰小型车仿真结果

图9 小型车跟驰大型车仿真结果
表4 比较了测试集中小型车跟驰小型车与小型车跟驰大型车各10 条轨迹的仿真速度与轨迹的MSE值。与不考虑前车车型的LSTM 模型、IDM 模型相比,IVT-CF 模型仿真速度MSE 均值分别降低了23.8%,15.8%,仿真轨迹MSE 均值分别降低了31.7%,18.7%。IVT-CF 模型速度与轨迹的MSE 均值小于其他两个模型,预测性能更好且更稳定,与观测车辆的运动速度和轨迹更接近,能根据前车车型更好地预测后车速度和轨迹。
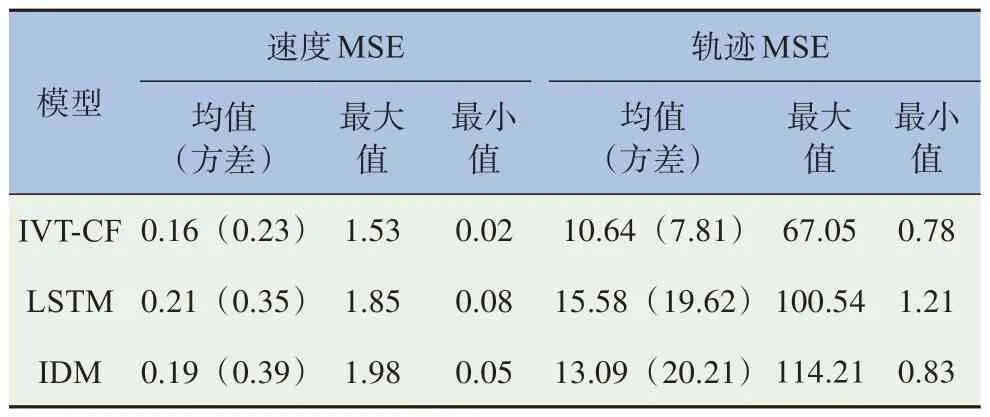
表4 MSE统计结果
前车突然急停,IVT-CF 模型仿真结果如图10所示,仿真车辆能调整自身的跟车状态,及时停车,未与前车发生碰撞,该模型能用于前车急停的跟驰场景。
图10 前车急停IVT-CF模型仿真结果
IVT-CF 模型能根据输入车型组合编码,区分小型车跟驰小型车与小型车跟驰大型车不同场景下的驾驶行为,获得更好的预测效果。LSTM 模型与IDM 模型没有考虑前车车型不同,后车跟车行为的差异性,使用全局性的方法拟合驾驶员的驾驶行为,虽然能适应不同驾驶员的驾驶特征,但是预测精度较低。
2.3.2 多车跟驰稳定性测试
本文采用多车直线仿真验证IVT-CF 模型的稳定性,多车均匀分布在一条车道上。在给定首车行驶状态的条件下,通过仿真产生后续车辆的跟车行驶轨迹。考虑到在跟驰过程中常见的加减速特性,设计首车的行驶状态包含以下4个部分:
1)以5 m/s的速度匀速行驶150 s;
2)以0.5 m/s2的加速度加速行驶10 s;
3)以-0.5 m/s2的加速度减速行驶10 s;
4)以5 m/s的速度匀速行驶90 s。
仿真车队规模为9辆,车辆之间的初始车头间距为20 m,车辆的初始速度设为5 m/s,仿真时间步长为0.1 s。考虑大型车对于跟驰车队的影响,在仿真车队中插入2辆大型车,研究IVT-CF模型在大型车混入的跟驰车队中的稳定性。仿真车队中小型车跟驰小型车、小型车跟驰大型车使用IVT-CF模型,大型车跟驰小型车使用IDM模型。小型车车队与大型车混入的多车直线仿真速度与轨迹如图11~12所示。
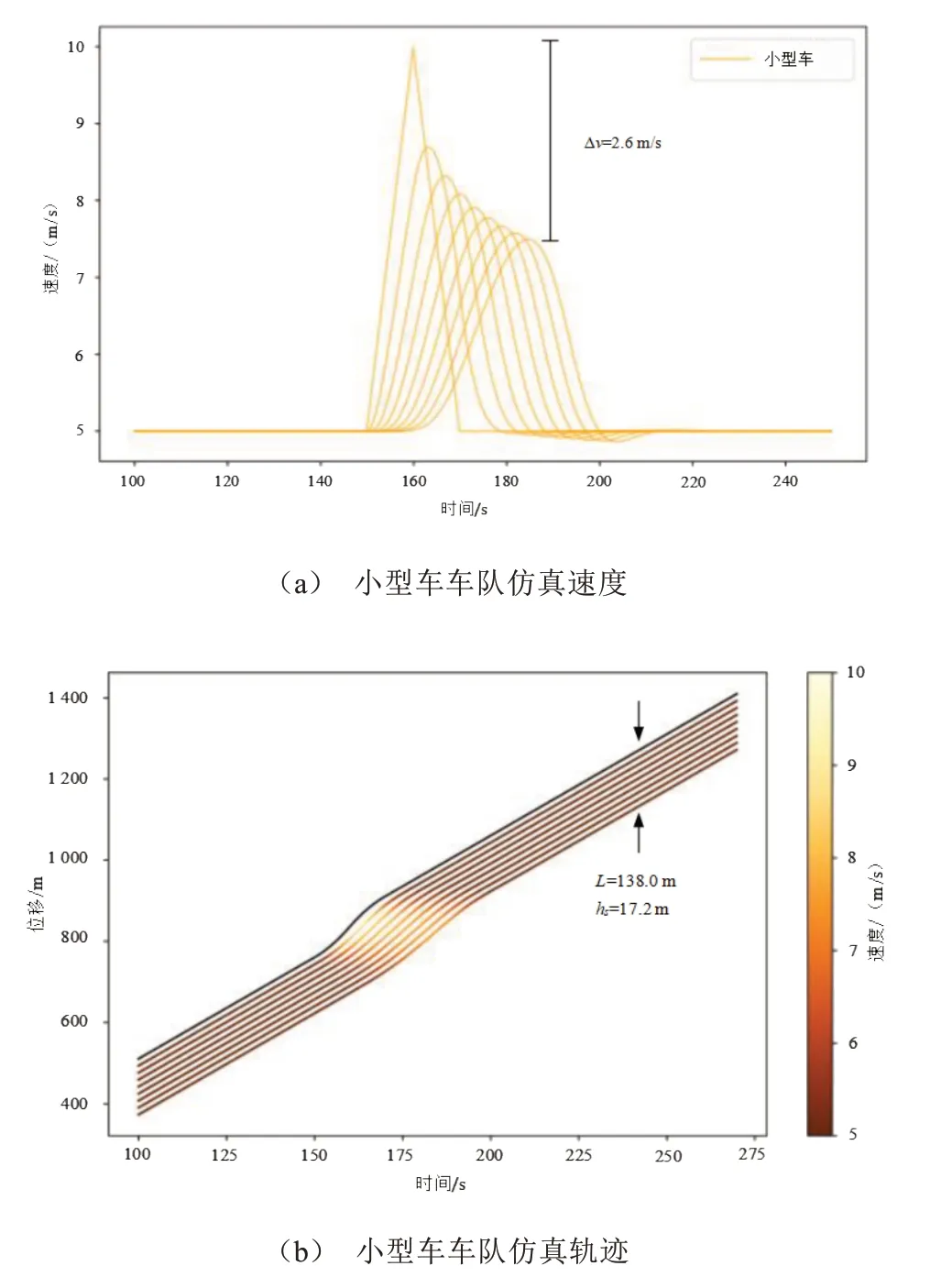
图11 小型车多车直线仿真结果
由图11a 和图12a 可知,小型车车队后车跟驰速度大于大型车混入车队后车的跟驰速度,小型车跟驰车队中首车与尾车的最大速度相差2.6 m/s,大型车混入车队首车与尾车的最大速度相差3.5 m/s 。大型车混入跟驰车队后,后车速度明显降低,后车跟驰行为更加保守。

图12 大型车混入多车直线仿真结果
由轨迹仿真图11b 和图12b 可知小型车车队交通流恢复稳定后的车队长度为138.0 m,车辆间的平均车头间距为17.2 m;大型车混入车队交通流恢复稳定后的车队长度为145.0 m,车辆之间的平均车头间距为18.0 m。大型车混入车队长度要大于小型车的车队长度,大型车混入后一定程度上降低了道路交通流效率。
小型车跟驰车队中IVT-CF 模型仿真后车速度较快,车头间距较小,当前车突然减速,后车采取较大幅度的减速行为,避免发生碰撞。大型车混入跟驰车队,当大型车突然减速,因后车速度较低,减速行为更加平缓。IVT-CF 模型能模拟小型车跟驰车队与大型车混入跟驰车队后车的驾驶行为特征。
3 结论
首车发生扰动,IVT-CF 模型向后续车辆传播速度的振幅逐渐减弱,后车随时间与车辆间速度的传递逐渐回归平稳状态,消散交通流中的扰动,使交通流状态趋于稳定。小型车跟驰车队从发生扰动到恢复稳定的时间为65 s,大型车混入的跟驰车队从发生扰动到恢复稳定的时间为92 s。该模型具有交通流稳定性与抗干扰能力,能应用于智能汽车辆跟驰行为的研究中。
针对前车车辆类型不同、跟驰行为的差异性,本文在LSTM 与Attention 模型中引入车型组合编码输入,建立了IVT-CF 模型。通过训练测试可知模型具备了根据前车车型选择不同跟驰行为的能力。与不考虑车型特征的LSTM 模型和IDM 模型相比,跟驰过程的预测精度有了明显提高,且能适应前车突然停车的跟驰场景。多车直线仿真试验表明IVTCF 模型具有一定的稳定性与抗干扰能力。IVT-CF模型对车型的辨识与应变能力更接近原始数据中人类的驾驶决策行为,有助于提高跟驰模型行为的智能化水平,能够为今后智能汽车的跟驰行为设计和应用提供参考。
