无线传感器网络节点自定位算法的实际应用研究*
2013-12-10刘俞
刘 俞
(马鞍山职业技术学院计算机系,安徽 马鞍山243031)
引言
无线传感器网络[1]是将大量的具有无线通信能力的传感器节点部署在监测区域中,这些节点在部署完成后的短时间内通过无线通信方式自组织形成一个多跳的网络系统,然后立即进入运行状态,所有节点协同工作实施监测任务.由于无线传感器网络与传统监测技术相比具有部署速度快、所需基础设施少、精度高和生存周期长等优势,近年来,无线传感器网络在各种大规模环境监测、安全监测等系统中得到了广泛的应用,如森林防火监测、空气污染监测、地震监测预警、车辆定位跟踪、紧急救灾抢险等.
其中,节点定位技术是无线传感器网络中的关键支撑技术.首先,它是无线传感器网络其它关键技术的基础,如路由技术中路由路径的建立与优化就必须建立在节点已完成定位的基础上;另外,位置信息是构成监测数据的重要部分,传感器节点所获取的数据的有效性和可靠性需要建立在定位准确性的基础上.根据定位机制的不同,现有的无线传感器网络自身定位算法有range-based和range-free 两类[2]:前者是基于测距的定位算法,需要利用测距技术测量节点间的距离或角度,典型的测距技术有RSSI,TOA,TDOA和AOA,算法对硬件的要求高,定位精度较高;后者则与距离无关,是利用网络的连通性进行定位,有质心、DV-Hop、APIT、LMAP 等典型算法,算法对硬件的要求低,定位精度相对较低.
1 山区景点环境监测与游客安全监测系统的提出
我国地域辽阔,有众多的山区旅游景观,如:安徽黄山、四川九寨沟、黑龙江大小兴安岭等.这些景点的旅游价值体现在其环境的原始性.因此,其生态环境、动植物资源的保护就显得尤为重要.其中,环境监测是实现环境保护的重要手段.目前,无线传感器网络技术被越来越多地运用在环境监测中,其主要原因是利用无线传感器网络来完成环境监测有以下几方面的优势:1)网络的部署速度快,传感器节点的体积与功耗很小,因此它对被监测区域的环境和人员的影响很小;2)传感器节点具有分布区域广、密度高、精度高以及较为稳定的特点,不同区域的节点可以将自身采集到的监测数据筛选融合后,通过优化后的路由路径传送到监控基站,使得监控者能实时了解整个被监测区域的情况.另外,监控者也可以根据需要向网络节点发布控制指令,接收到指令的节点会做出及时响应,因此,无线传感器网络的监测范围广、探测精度高、效率高;3)传感器节点本身具有一定的计算能力和存储能力,相邻的节点可以通过无线通信相互联系相互配合来实现监测,因此无线传感器网络的监测具有较高的稳定性.正是因为无线传感器网络具备以上的优势,从而使其成为当今环境监测应用的首选.
另外,山区景点通常地势险要,地理情况复杂,每年都有许多旅游者在山区遇险失踪,由于地域广阔,地势复杂,因此,很难对遇险者的位置进行定位,造成了无法开展救援的情况,从而导致了人员的伤亡.利用无线传感器网络则可以对进入山区景点的游客进行实时定位,使得监控者能随时了解每名游客每一时刻所处的位置,当发生意外情况时,救援者能在第一时间赶到遇险游客的位置实施救援,所以利用无线传感器网络进行游客安全监测成了保证游客人身安全的重要措施.
2 监测系统中的节点定位算法
2.1 对监测系统中节点定位算法选择的分析
根据定位机制的不同[2],现有的无线传感器网络自身定位算法有range-based和range-free 两类,前者需要通过对信号的物理测量来计算未知节点与锚节点之间的角度或距离,因此这种算法对节点的硬件要求很高.例如,在TOA 方法和TDOA 方法中,节点需要配备射频信号与超声波信号收发的硬件装置;在AOA 方法中,节点需要测量接收到的由其它节点发射的无线信号的到达角度,因此节点需要配备具有角度测量能力的天线装置;在RSSI 方法中,节点需要配备收发射频信号及测量其能量衰减的硬件装置.由上可见,采用range-based 类型的定位算法,所需的节点硬件成本很高,从而导致了整个无线传感器网络的成本过高,可行性不强.同时,在山区环境中,岩石、树木、植被等物体会对信号产生遮盖、衰减和散射,这些情况会直接引起信号的接收端产生严重的测量误差,从而导致节点的定位误差增大.另外,天气情况包括雨、雪、雾、湿度、温度等因素也会影响信号的传输,不同天气情况会造成不同的测距误差.因此,由于这些外界因素的干扰,使range-based 定位方法失去了定位精度高的优越性.综合以上的情况分析可以发现,range-based 定位方法并不适合在山区景点环境监测与游客安全监测系统中使用.
DV-hop 定位算法和质心定位算法是两种典型的range-free 定位方法,在这种类型的定位方法中,节点是通过网络的连通性,来估算与其它节点间的距离,当一个节点获取到与足够多的邻近已定位节点的距离信息后,再根据具体算法进行自身的位置计算,从而实现定位.因此,节点在定位过程中不再需要通过对信号的物理测量来计算节点间的角度或距离信息,这使得传感器节点不需要信号的收发和角度测量天线等附加硬件模块的支持,在减少了成本的同时也降低了能耗.其次,range-free 定位方法受外部环境影响较小,算法复杂度低,容易实现,从而能够有效地延长整个网络的生存期并且降低网络的成本.另外,虽然DV-hop 定位算法和质心定位算法没有range-based 定位方法的定位精度高,但是它在定位过程中受外部环境影响很小,在各种不同的环境中都很适用,稳定性高,并且山区景点环境监测与游客安全监测对于节点的定位精度要求并不是很高,比如定位误差在10m 范围内都可以接受.因此,利用DV-hop 定位算法和质心定位算法作为山区景点环境监测与游客安全监测系统的定位支持算法较为合理可行.
2.2 DV-hop 定位算法与质心定位算法
DV-Hop 定位算法[3]是目前较为常用的一种定位算法,其基本思想是利用节点与节点间的多跳机制,通过无线通信与节点的协同工作,测算出网络平均每跳距离,每个未知节点在与其它节点的通信过程中,记录下自身与周围邻近锚节点相隔的最小跳数值,然后用此最小跳数值与网络平均每跳距离相乘得出它与相应的锚节点的相隔距离,当未知节点计算得出与3 个或3 个以上的锚节点的相隔距离后,再利用三边测量法或最大似然估计法计算出未知节点的位置坐标[4].此定位算法使用网络平均每跳距离代替节点间的实际距离,对节点的硬件要求低,实现简单.
DV-Hop 算法的定位过程:所有节点(包括锚节点和未知节点)利用已有的距离矢量路由协议进行通信,所有未知节点获得与锚节点的相隔跳数,所有锚节点获得其它锚节点的位置坐标及与其的相隔跳数,每个锚节点通过自身的位置坐标值和获取到的其它锚节点的位置坐标值,计算出自己与其它每个锚节点间的距离值,然后分别用每个距离值除以对应的最小跳数值,将得到的所有的结果取平均值即作为网络平均每跳距离值,随后每个锚节点将其计算得出的网络平均每跳距离值向网络广播.每个未知节点只保存第一个达到的数据值,再将此值与所记录的每个跳数值相乘,从而分别估算出自身与每个邻近锚节点的距离.当未知节点获得与足够多的锚节点的距离值后,再执行三边测量或最大似然估计法进行计算,从而完成自身定位.
质心定位算法[5]是一种基于网络连通性的定位算法,其基本思想是利用平面几何中对多边形质心的定义,即对于一个密度均匀的多边形,它的几何中心即为质心,此多边形各个顶点坐标的平均值就是质心的坐标.质心定位算法就是将此定义应用于无线传感器网络节点的定位,即若某个未知节点能获取到3 个或3 个以上锚节点的信号,则认为自身处于这些锚节点所构成的多边形的中心位置,接下来计算出这些锚节点坐标的平均值作为自己的估计位置坐标[6].此定位算法的计算量小,不需要节点间进行大量的通信,硬件简单,功耗低,容易实现.
质心算法的定位过程:每个锚节点都周期性地向网络广播一个数据包,其格式为(id,x,y),其中id是自身在网络中的标识号,x和y 是其位置坐标值.当一个未知节点在预设的时间内接收到来自某个锚节点的数据包的个数达到事先已设定的阈值后,则该未知节点确认与此锚节点相连通,若此未知节点获得与自身相连通的锚节点个数达到3 个或3 个以上,则执行质心定位算法,计算出这些锚节点的质心坐标作为自身的位置坐标.
2.3 DV-hop 定位算法在山区景点环境监测系统中的应用分析
首先,通过飞行器或人工方式在整个景区范围内播撒大量的用于环境监测的节点,这里称之为基础节点,在节点部署过程中对于环境监测的重点监测区域和事故易发的危险区域,可通过人工方式加大节点的播撒密度,其中包括小部分携带有GPS 定位设备可自身精确定位的锚节点,以及大部分的未定位的普通节点.节点部署完成后,锚节点通过自身的定位装置进行精确定位,然后未定位的普通节点以邻近的锚节点为参考点,通过节点间协同工作,执行DV-hop 算法对自身进行定位.未定位的普通节点A 的定位过程,如图1 所示.

图1 山区景点环境监测区域中的节点定位示意图
环境监测系统为了实现实时监测的目的,利用传感器节点周期性地对监测区域环境的数据进行采样,采样的周期和数据的种类可根据具体需要调整.系统可以设置两种工作模式:根据某特定情况下的具体需要,由监控中心向网络广播特定的指令,节点获取指令后进行分析执行,从而作出及时的响应,这种工作模式为被动工作模式;另外,当监测区域中的某个传感器节点获取的数据超过预设的警界值时,例如在图2 中,A 节点采集到的温度数据为60 ℃(假设预设的温度警界值为50 ℃)时,该节点将主动把采集到的数据和自身位置信息通过已形成的路由路径发送到监控中心,这种工作模式为主动工作模式,如图2 所示.
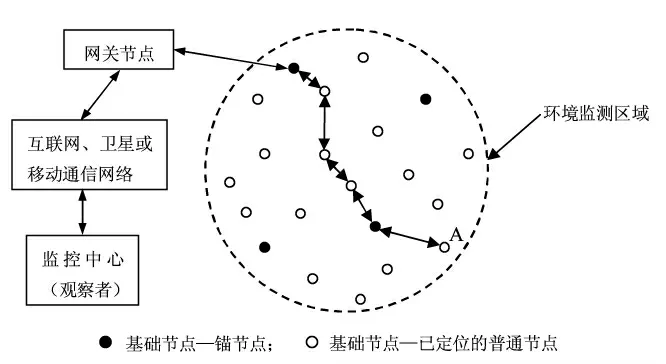
图2 山区景点环境监测网络工作示意图
通过这两种工作模式,系统既能完成常规监测的数据采样和数据收集,也能实时获取突发事件的信息,对产生异常数据的地区进行定位,从而能及时采取措施应对突发事件.
2.4 质心定位算法在游客安全监测系统中的应用分析
对于进入景区的每个游客,事先佩带无线传感器网络节点设备,称为游客节点,在整个游览过程中,游客节点周期性地工作,此时用于山区景点环境监测的所有基础节点都已完成了自身的定位,游客节点便可利用周围的基础节点作为参考节点进行自身定位,随后游客节点将计算得到的位置信息发送至监控中心,使得监控中心能实时了解每个游客每一时刻所处的位置.
在对游客节点进行定位时采用质心定位算法,因为游客是不断移动的,所以对于游客节点需要进行周期性的定位,例如,游客节点每隔5 min 发送一个请求定位信息,当周围节点收到此信息后,便将自身的位置坐标发送给此游客节点,当游客节点接收到的邻居节点的位置信息的个数达到设定的阈值后,便执行质心定位算法,估算出自身的位置坐标,并将位置信息通过路由路径发送到监控中心,如图3 所示.
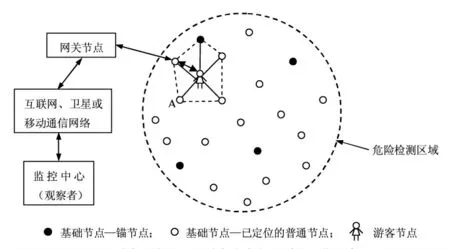
图3 游客节点定位及游客安全监测系统工作示意图
另外,当监控中心通过游客节点发来的位置信息发现游客已进入危险区域后,则可以通过网络向此游客节点发送一个危险警报信号,使游客获知危险,及时改变游览路线,回到安全区域.
3 小结
本文以无线传感器网络在实际监测系统中的应用为背景,探讨了DV-Hop 定位算法与质心定位算法在实际环境中应用的可行性.通过分析发现range-based定位方法并不适用于山区环境中的定位,而range-free 定位方法则比较适用.在山区景点环境监测系统中采用DV-hop 定位算法进行节点定位,在游客安全监测系统中采用质心定位算法进行节点定位.经分析,这种方案有较高的可行性,在今后的研究中,将继续完善系统的设计,提升系统的性能.
[1]孙利民,李建中,陈渝,等.无线传感器网络[M].北京:清华大学出版社,2005.
[2]王福豹,史龙,任丰原.无线传感器网络的自身定位系统和算法[J].软件学报,2005,16(5):857-868.
[3]Nicolescu D,Nath B.DV Based Positioning in Ad Hoc Networks[J].Journal of Telecommunication Systems,2003,22(1):267-280.
[4]刘俞.无线传感器网络中基于传输时间比的定位算法及改进[J].重庆科技学院学报:自然科学版,2012,14(2):142-145.
[5]Bulusu N,John H.GPS-less Low Cost Out-Door Localization for very small devices[J].IEEE Personal Communications,2000,7(5):28-34.
[6]刘俞.无线传感器网络中基于复合权值的质心定位改进算法[J].辽东学院学报:自然科学版,2012,19(1):31-35.
