考虑充电站可调潜力的虚拟惯性功率补偿控制策略
2024-03-07施兴烨唐建林梁莉莉
施兴烨,柯 松,张 帆,唐建林,梁莉莉,杨 军
(1.交直流智能配电网湖北省工程中心,湖北省 武汉市 430072;2.武汉大学电气与自动化学院,湖北省 武汉市 430072;3.南方电网科学研究院有限责任公司,广东省 广州市 510663;4.广东省电网智能量测与先进计量企业重点实验室,广东省 广州市 510663;5.广东电网有限责任公司肇庆供电局,广东省 肇庆市 526060)
0 引言
近年来,可再生能源(renewable energy source,RES)发电容量占比不断升高,电力系统的惯量也随之下降,电网的抗扰动能力也持续下降[1]。高比例RES 和高比例电力电子设备的“双高”特性将成为新型电力系统的主要特征[2],如何挖掘优质调频资源以提高系统的惯量水平、增强电网的抗干扰能力与频率稳定性值得深入研究。
RES 大规模接入易导致系统惯量与阻尼不足[3],当系统遭受功率不平衡冲击时,频率偏差与最大频率变化率过大,给电网稳定性带来严峻挑战。因此,具备主动支撑能力的RES 控制技术得到了广泛研究[4]。RES 采用下垂控制策略并网,在一定程度上提高了系统频率稳定性[5-6],但仍然存在缺少惯量与阻尼不足等问题[7]。 虚拟同步机(virtual synchronous generator,VSG)通过模拟同步机的机电特性提供惯量与阻尼,为RES 稳定并网提供了解决思路[8]。文献[9-10]研究了光储VSG 并网系统,设计了提升光伏发电效率与系统稳定性的光储协调控制策略。文献[11]设计了基于VSG 的风储联合调频控制策略,有效解决了风电机组二次频率跌落的问题。上述文献在设计控制策略时都配置了储能单元,但忽略了储能自身的响应特性,且存在储能类型单一问题。实际上,将储能等效为直流电压源会影响VSG 功能的实现。文献[12-13]通过发挥不同储能的互补特性提高了光伏VSG 的工程实用性。然而,由于RES 本身不具备良好的惯性功率支撑能力,相较于下垂控制,实现这类VSG 控制需配置较大容量且具备短时间响应能力的储能单元,其成本限制了RES 扩容与VSG 规模化应用[14]。下垂控制与VSG 控制在实现形式上存在惯量支撑功率之差[15],若能基于传统逆变器控制策略,挖掘系统中惯性功率来源,则能有效减少储能需求,降低改造设备所需成本,并利于后续扩容。
电动汽车(electric vehicle,EV)作为具备快速响应能力的柔性资源,具有参与系统调频、促进RES消纳、提升系统稳定性与经济效益的潜力[16-18]。为改善系统频率,文献[19]设计了单体EV-VSG 方案,可在微电网孤岛运行时提供频率支撑;文献[20]考虑EV 的充电需求,设计基于EV 的VSG 调频控制策略,在EV 数量较多时调频效果显著;文献[21]将EV 视作储能,设计基于充电站的VSG 控制策略来平抑光伏与负载波动,并提供频率支撑能力;文献[22]设计了直流充电站VSG,并在控制策略中考虑EV 出行的影响。但上述研究未对具有异质性的EV 参与调频响应的能力进行有效评估,导致较难协调调频任务与充电需求,且EV 与电网互动均集中在较长时间尺度的频率调整上,影响EV 作为负荷的充电计划。
本文提出了一种基于EV 可调潜力的虚拟惯性功率补偿(virtual-inertial power compensation,VIPC)控制策略,旨在不改变已有RES 控制策略的前提下,合理利用EV 资源提供惯性功率支撑,以减小储能需求和成本,改善新型电力系统中电网抗干扰能力不足的问题。
1 基于闵可夫斯基和的EV 可调潜力评估方法
为合理利用充电站内EV 参与频率调节的能力,以及有利于设计合理的控制算法在系统并网点处引入惯性功率支撑,有必要挖掘EV 的可调潜力。在不影响充电需求的前提下确定充电功率和电池容量边界,为EV 参与调频提供可调裕度。
1.1 EV 可调潜力概述
本文假设站内的充电桩均具备V2G(vehicle-togrid)能力,在此基础上对站内EV 的可调潜力进行分析。文献[23]将EV 用户在停车时间内可满足未来行驶用能需求所产生的用电负荷称为“自调度负荷”。以此为基础,将能参与到需求响应的EV 电池容量与充、放电功率称为EV 的可调节潜力。
同一充电站内的EV 可在充电站层面上视为广义储能(generalized energy storage,GES),单个时段内对外表现为自调度的充放电功率。当调度指令下达时,在需求响应中改变充、放电功率,可发挥EV可调度潜力。EV 的可调潜力如附录A 图A1 所示。因此,充电站内多个EV 可调潜力的评估可转化为GES 最大充、放电功率的计算,以及组成GES 的每辆EV 充、放电行为的计算过程。
1.2 EV 可调空间基本模型
单辆EV 的可调空间基本模型可通过其并网功率约束、电池荷电状态(state of charge,SoC)及其约束等效表示,如式(1)和式(2)所示。
式中:cn,t为第n辆EV 在t时刻的电池电量;ηch和ηdis分别为充、放电实际效率;和分别为表示第n辆EV 在t时刻处于充、放电状态的布尔变量;和分别为第n辆EV 在t时刻的电池电量下边界、上边界;Δt为单位时间间隔。
文献[24]证明了EV 在能量交换效率不为100%时不会同时进行充、放电。因此,增加充、放电约束条件如式(3)所示。
由布尔变量的性质可知,当第n辆EV 处于离网状态时,有xn,t=0,此时,=0,=0;当第n辆EV 处于并网状态时,有xn,t=1,此时,和最多有且仅有一个值为1,即在t时刻,第n辆EV 不会同时充、放电。
EV 作为负荷,存在用电需求,当第n辆EV 离网时,其电池电量不应低于用户期望值。设EV 并网时电池电量初始值为,其电池电量边界可以表示为:
因此,在考虑用户充电需求的情况下,单辆EV的可调空间可由式(1)至式(5)等效描述,其可调空间如附录A 图A2 所示。
1.3 基于闵可夫斯基和的等效GES 模型
现有EV 参与频率调节的V2G 控制框架中,EV并不是直接参与频率调节,而是通过充电站、聚合商以聚合的形式参与调频响应[25-26]。由于EV 充电决策空间具有多维异质性,聚合计算需在考虑EV 异质空间的基础上对站内EV 进行等效评估。
闵可夫斯基和是应用于欧氏空间的一种求取多个相同定义域变量空间膨胀集的求和方法,其原理示意图如附录A 图A3 所示,基本表达式如式(6)所示。虽然不同EV 并网的时间具有差异性,但布尔变量xn,t可将EV 的并网决策行为延伸至同一时间定义域,借助闵可夫斯基和将充电站内的EV 等效为GES。
式中:⊕为变量空间A和B的闵可夫斯基求和运算符;a和b分别为变量空间A、B中的元素。
对于N个变量空间,定义αN,其中,αn为变量空间,包含多个元素变量,且αn具有相同的定义域。对于充电站层面上的EV 而言,其单辆EV 的变量空间,以及充电站内由N辆EV 组成的集群ΨEV,经闵可夫斯基求和后的GES模型可以分别表示为εn和,其中,εn和分别为由式(7)和式(8)所示约束条件构成的变量空间。
式(8)的本质是将充电站内的EV 决策空间投影至一个超立方体空间,将站内EV 决策行为投影至立方体内对应决策量。在进行边界条件的闵可夫斯基求和聚合过程中,实际上增加了决策的可行域,但同时保留了变量决策间的条件约束,还考虑了单个EV 并网、离网对等效GES 充、放电功率边界和等效电池电量的影响,因而在实现模型维度等效压缩的前提下,仍能保证充放电决策空间的可行性[27]。
上述模型从充电站层面将站内所有并网EV 等效为一个大容量和大充、放电功率的GES 设备,实现了集群EV 充放电决策空间的聚合。GES 中的参数变量决定了站内EV 的可调潜力,其中:和分别为t时刻GES 能够达到的最大充、放电功率;分别为t时刻GES 等效电池容量的下边界和上边界;ΔCGES,t为t时刻GES 因EV 并网情况改变而引起的等效电池电量变化。充电站层面等效GES 的变量及其参数如式(9)所示。
式中:Pch,GES,t和Pdis,GES,t分别为t时刻GES 的充、放电功率;CGES,t为t时刻GES 的等效电池电量。
等效GES 模型考虑了单个EV 并网、离网对等效GES 充、放电功率边界和等效电池电量的影响。同时,保留了单辆EV 的变量约束条件,保证了充放电决策的有效性。基于闵可夫斯基和可实现多EV单体的聚合管理,从充电站层面将站内所有并网EV 充、放电决策通过等效GES 统一决策,免去了多变量带来的计算复杂、调度难度高的问题,同时,也避免了单辆EV 调度功率小、补偿能力不足的缺陷。
2 充电站GES 的VIPC 控制策略
EV 参与长时间尺度的频率调节可能会影响用户的充电需求。因此,参考VSG 的暂态响应特性,提出适用于充电站的VIPC 控制策略,使得充电站等效的GES 可为系统提供短时间的频率支撑,不影响用户的充电体验。
2.1 VSG 控制策略
同步发电机具有一次调频与惯量的特性,在实际同步发电机中,输入的机械角速度为Ω,转子角速度为ω,电机极对数为p,满足以下条件:
设电机极对数p为1,角速度在数值上等于机械角速度,当系统中出现功率不平衡冲击时,VSG 在不平衡功率引起的转矩作用下,VSG 状态参数(功角、转子角速度)表述为:
式中:δ为VSG 转子功角;ωn为同步转子角速度(电网角频率),取100π rad/s;Tm、Te、TD分别为VSG 的输入机械转矩、电磁转矩和虚拟阻尼转矩;J为VSG的虚拟转动惯量。
根据转矩与功率间的关系,式(12)可改写为:
式中:Pm为VSG 的输入机械功率;Pe为电磁功率,即VSG 的输出功率;D为阻尼系数。
同步发电机的功频调节部分由调速系统完成,借鉴同步发电机调速系统,VSG 的调速方程可以表示为:
式中:Pref为有功功率给定值;Kf为VSG 的虚拟调差系数。
根据功角特性,VSG 的有功输出功率Pe可以表示为:
式中:Ul为VSG 的输出端电压;E0为VSG 的滤波器端口电压;Xf为滤波器电抗。
采用小信号模型法对VSG 进行分析,VSG 输出功率和有功功率给定值之间的传递函数G(s)可近似表述为:
式中:s为拉普拉斯算子;和分别为Pe和Pref的频域变量。
由式(16)可知,理想条件下,VSG 在对应功率给定指令阶跃变化时的输出功率特性表现出二阶振荡衰减特性。由式(12)可知,当系统处于稳态时,VSG 的转矩量Tm-Te-TD恒定,角速度变化率dω/dt与虚拟转动惯量J的大小成反比,即虚拟转动惯量越大,系统的角速度变化率越小,系统抵抗频率扰动的频率稳定性越强。VSG 控制策略通过引入与同步机类似的虚拟转动惯量使得系统的频率稳定性得到了相应的提高。
2.2 VSG 惯性功率响应分析
VSG 表现出的惯量是在功率环中加入惯性功率分量,使惯量以电功率的形式并入电网。
根据式(11)、式(13)、式(14)、式(15),转子角速度表达式为:
稳态时,Pref与Pe相等,当系统中负荷发生阶跃扰动时,表现为系统功率指令发生ΔPref阶跃变化,可求得式(17)的时域表达式:
系统负荷发生扰动后,由转子转矩方程可知,转子角速度将发生变化,转子将吸收或释放动能以平衡转矩,体现为转子动能的增减。定义转子惯性功率为PJ,由式(13)可改写得到转子的功率守恒方程为:
因此,转子惯性功率的指令阶跃响应为:
式(20)表明,VSG 控制策略的响应过程是在下垂控制的基础上加入虚拟转子惯性功率的动态响应,其功率动态响应组成如图1 所示。VSG 中下垂控制环节输出的功率提供稳态功率支撑,转子惯性功率提供暂态功率支撑。

图1 VSG 转子惯性功率动态响应Fig.1 Dynamic response of inertia power of VSG rotor
2.3 VIPC 控制策略
由式(19)可知,VIPC 控制策略的核心是将系统频率扰动作为输入指令使其产生对应的惯性功率输出,以改善频率稳定问题,其示意图如图2 所示。图中:Uabc和iabc分别为逆变器输出的三相电压、三相电流量;Ud为逆变器输出电压的d轴分量;为d轴电流参考值;id和iq分别为逆变器输出电流的d轴、q轴分量;L为逆变器滤波电感;为三相参考电压;为PJ参考值;PI 为比例-积分控制。需要说明的是,由于GES 对整个系统而言应被视作一个可调的大功率负荷,正常情况下,GES 以当前站内EV 所需充电功率作为消耗功率。当系统频率发生扰动时,GES 通过合理协调站内EV 可调功率来响应功率需求[26],提供惯性功率支撑。因此,惯性功率补偿控制环节中的功率参考量以当前GES 功率消耗为零基准值。

图2 VIPC 控制策略示意图Fig.2 Schematic diagram of VIPC control strategy
GES 采用VIPC 控制策略,只在频率发生扰动时刻输出惯性功率,待系统频率重新恢复正常值后即恢复基准,这避免了对EV 的充电计划产生影响,可改善EV 电池的损耗问题。
以光伏为例,光伏电站与采用VIPC 控制策略的EV 充电站协同的拓扑结构如图3 所示。采用下垂控制策略的光伏电站作为微电网中调频的稳态功率来源,采用VIPC 控制策略的GES 作为调频辅助资源,提供惯性功率支撑。通过光伏电站与充电站协同配合,对外表现出VSG 的特性。
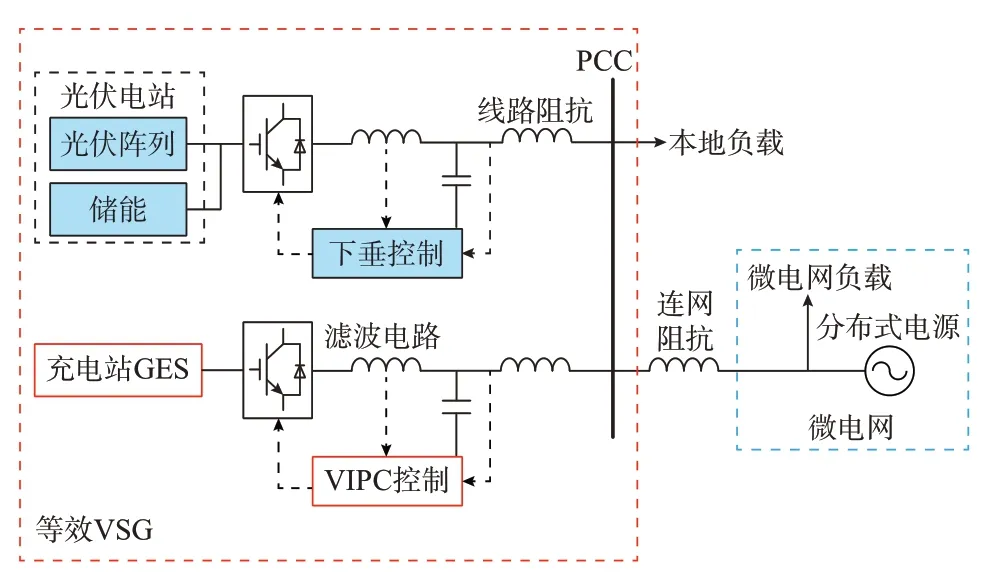
图3 光伏电站与EV 充电站协同拓扑结构Fig.3 Topology of photovoltaic power station coordinating with EV charging station
3 仿真分析
3.1 场景选取及仿真参数
在MATLAB/Simulink 中搭建充电站GES 模型及图3 的拓扑模型,光伏电站采用下垂控制策略,GES 采用VIPC 控制策略。其中:EV 与充电站参数如附录B 表B1 所示;光伏电站、VIPC 参数以及微电网相关参数如附录B 表B2 所示。
3.2 仿真结果与讨论
3.2.1 GES 等效调节容量
采用本文GES 建模方法得到在满足用户充电需求情况下充电站全天GES 的等效容量边界范围,如附录C 图C1 所示。GES 在容量边界范围内都是可调控的,具体的控制策略与电网调度策略以及EV 聚合商的调控策略相关。本文假设现有EV 参与调频的市场机制合理且完善,价格激励能补偿EV 参与调频的损失,站内的EV 均能参与V2G 调频服务。因此,暂不考虑EV 在站内的具体优化问题。
图4 为充电站实时可调功率边界,站内的可调功率边界与EV 的荷电状态相关。由于已达到上边界的EV 仅具备放电能力,如附录C 图C2 所示,在t=13 h 时,站内等效容量已偏向饱和,大部分EV 已经达到上边界。因此,出现图4 中上调功率边界减小的情况。
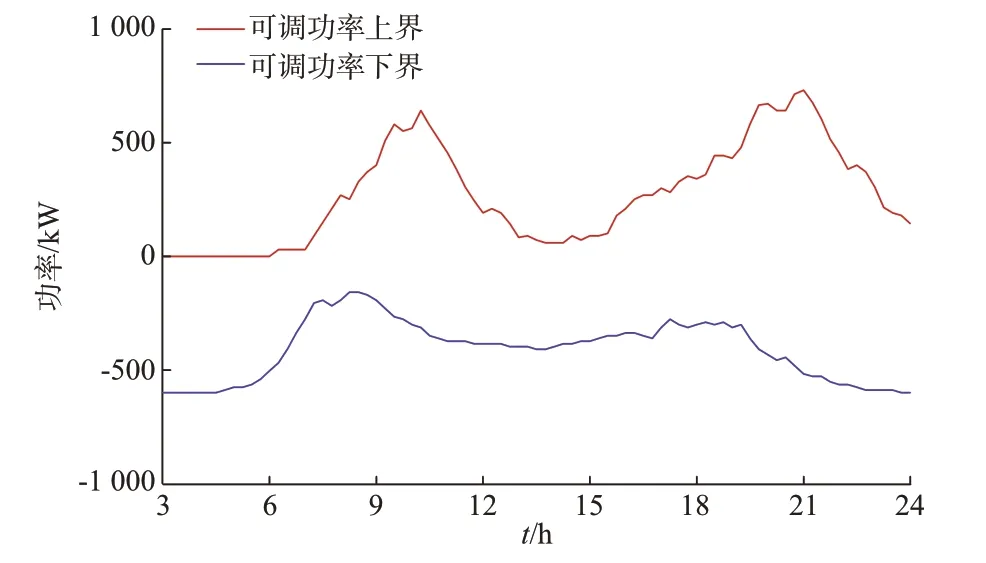
图4 充电站实时可调功率边界Fig.4 Real-time adjustable power boundary of charging station
3.2.2 并网运行时频率提升效果
以t=13 h 时GES 调节参数为例,此时,GES 的可调功率下界为-330 kW,可调功率上界为90 kW。将GES 采用VIPC 控制策略,并配合光伏电站参与频率支撑服务,为系统提供惯量。
初始时刻,系统稳定运行于额定状态,光伏电站输出额定功率300 kW,微型燃气轮机输出额定功率1 200 kW,系统频率稳定在50 Hz。t=1 s 时,系统负荷突增250 kW,1 s 后系统恢复额定状态运行;t=3 s 时,负荷突减250 kW,1 s 后系统恢复额定状态。根据容量以及下垂系数分配功率,微型燃气轮机和光伏电站分别承担200 kW 与50 kW 功率。3 种控制方案下的功率与频率响应结果如图5 与附录C 图C3 所示。

图5 并网运行时功率响应与频率响应结果Fig.5 Power response and frequency response results during grid-connected operation
3 种控制方案中,达到新的稳态的响应时间ts与最大频率变化率fcr如表1 所示。相较于其余2 种控制方案,在同样的参数下,VIPC 控制策略有效延长了频率稳定时间ts,降低了fcr,提升了系统惯量与稳定性。从图5(c)可以看出,VIPC 控制下,GES 能提供惯性功率支撑,响应持续时间约为0.6 s,响应前后功率基准值不变。同时,在VIPC 控制策略的协同下,储能功率输出更为平缓,可以降低储能快速性要求,并验证了EV 能以短时间尺度参与调频的结论。

表1 并网运行时不同控制方案的频率稳定性指标Table 1 Index of frequency stability with different control strategies during grid-connected operation
3.2.3 孤岛自治运行下频率稳定效果
假定光伏电站运行于孤岛自治状态,即在图3中连网阻抗处断开,讨论在该场景下VIPC 控制策略的频率稳定效果。3 种控制方案的功率响应与频率响应结果如图6 所示。
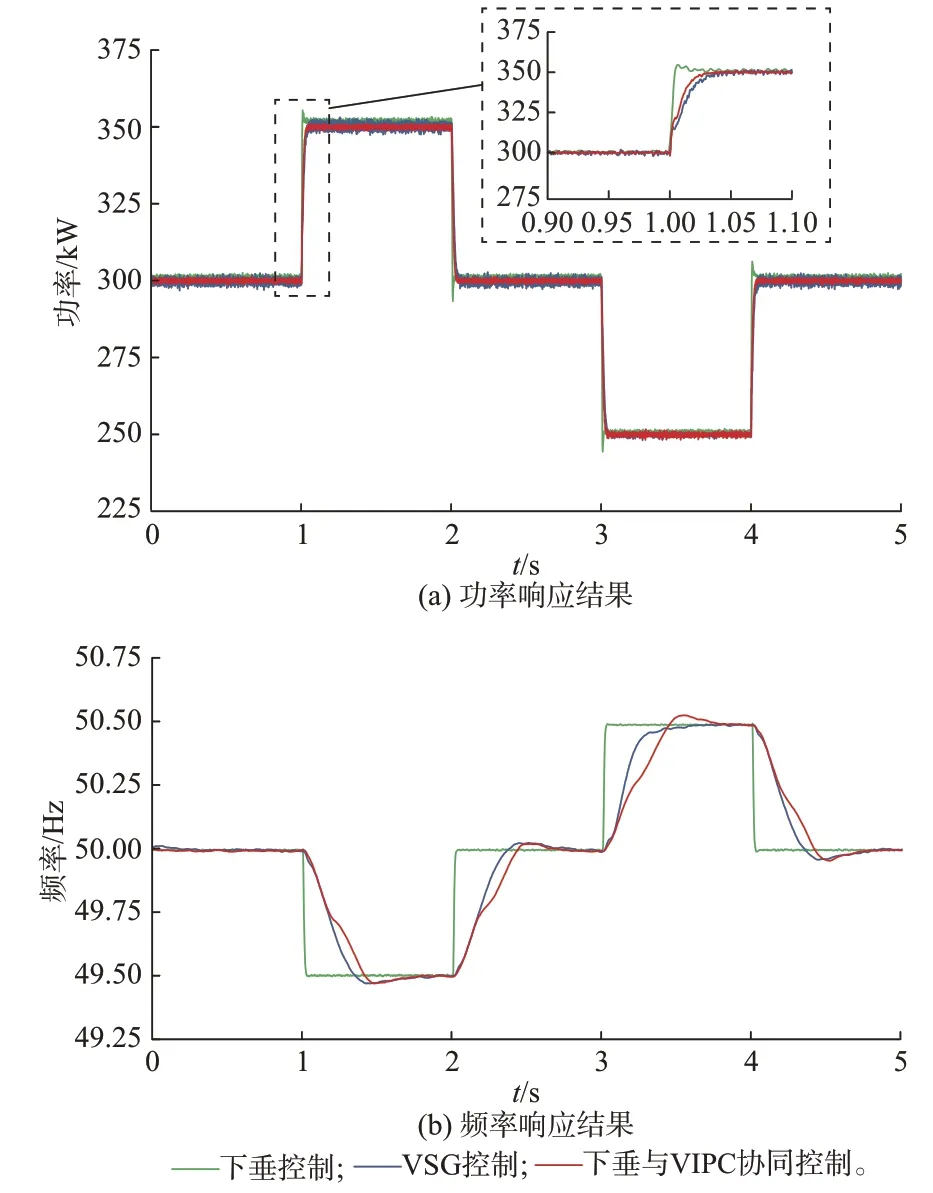
图6 孤岛自治运行时功率响应与频率响应结果Fig.6 Power response and frequency response results during islanded autonomous operation
由图6(a)可见,在孤岛自治运行模式下,3 种控制方案均能快速响应负荷需求。由图6(b)可知,下垂控制中由于缺乏惯性功率补偿单元,频率下降速率很快,系统的稳定性较低;VSG 控制中加入了虚拟惯量控制环节,在孤岛运行模式下系统频率变化近似满足一阶惯量响应特性,系统频率稳定性提高;下垂与VIPC 协同控制的频率响应与VSG 相似,其频率稳定时间ts、频率超调量σ、最大频率变化率fcr等频率稳定性指标如表2 所示。在同样的参数下,与直接采用VSG 控制策略的光伏电站相比,采用下垂控制策略的光伏电站配合采用VIPC 控制策略的GES 频率稳定性更优。
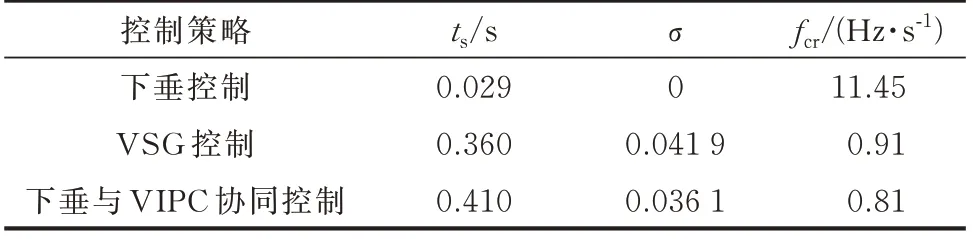
表2 孤岛自治运行时不同控制方案频率稳定性指标Table 2 Index of frequency stability with different control strategies during islanded autonomous operation
图7 展示了VSG 中储能功率响应以及VIPC 控制策略下GES 功率响应的结果。在孤岛自治运行场景下,为使得频率获得快速支撑,采用VSG 策略需要储能具备快速响应能力,而VIPC 控制策略使GES 能在发生负荷扰动时提供快速响应的惯性功率,降低了光伏电站对储能设备的响应能力要求,并提高了系统频率稳定性。同时,对于EV 而言,在孤岛自治运行模式下,提供惯性功率支撑的响应持续时间约为0.7 s,相对于整个充电过程所释放或吸收的能量而言,基本可以忽略不计,且在长时间尺度上扰动也可以互相抵消,EV 整个充电计划不会受到影响。

图7 储能与GES 功率响应结果Fig.7 Power response results of energy storage and GES
4 结语
EV 是典型的柔性负荷资源,合理利用其储荷特性可增强系统的频率稳定性。为提高EV 资源的利用率,减少RES 并网对高性能储能设备的需求以降低应用成本,且在不改变既有RES 控制算法的基础上引入惯性功率,提出了充电站层面上的GES 建模方法。通过分析VSG 转子功率特性设计了VIPC控制策略,并将其应用于GES 中,协同配合RES 发电提高系统频率稳定性。得到以下结论:
1)借助闵可夫斯基和提出了充电站GES 建模方法,对高维度异质化的多EV 充放电决策空间进行等效压缩处理,有效评估了充电站内EV 的聚合可调潜力,为EV 参与调频响应提供支撑。
2)GES 中引入VIPC 控制策略有效提高了RES并网惯量,改善了系统的频率稳定性。在并网和孤岛自治运行模式下,稳态时间相较下垂控制均能延长0.3 s 以上,调频效果略优于VSG。同时,在不改变RES 传统并网模式的基础上有效利用EV 的调频能力,为提高系统频率稳定性提供了新思路。
3)VIPC 控制策略将EV 参与调频时间尺度降低到1 s 内,极大减少了EV 参与调频的时间,并且不影响EV 的充、放电计划。
本文仅对单个充电站的控制策略进行设计,针对参数各异的充电站集群参与调频的VIPC 协同控制策略,以及在协同过程中通信交互对所提控制策略的影响还需进一步研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。