基于多状态量特征的电网安全稳定紧急控制策略制定方法
2024-03-07吕亚洲刘福锁李兆伟
吕亚洲,李 威,刘福锁,薛 峰,李兆伟
(南瑞集团有限公司(国网电力科学研究院有限公司),江苏省 南京市 211106)
0 引言
紧急控制是保证电力系统受到严重故障扰动后安全稳定运行的重要措施[1-2]。紧急控制策略由电网工况特征(又称“方式字”)、防御故障和控制措施等要素构成[3]。在实际工程中,紧急控制装置实时检测电网工况和故障,根据方式字匹配策略表执行既定的控制措施,工况通常利用某一确定的电气状态量(单一方式字,如断面功率)来刻画。在策略制定时,工程上主要基于离线典型方式,按照保守原则,通过时域仿真计算得到分档紧急控制策略[4-7]。随着中国新能源渗透率不断提高,电网运行方式呈现强不确定性和强非线性[8],系统稳定性受多状态量的影响,极端工况下一些不敏感状态量会演化为影响稳定性的主要因素,基于单一状态量特征作为方式字的紧急控制策略在运行中的失配风险日益突出[9-11]。
在高比例新能源电网接入下紧急控制策略失配对策方面,文献[12]从失配策略追加的角度提出采用广域测量系统(wide area measurement system,WAMS)得出的实测功角轨迹对紧急控制效果进行超前评估并对可能失配策略进行追加;文献[13]将能量函数法与轨迹预测相结合,在离线紧急控制策略失配时对控制量在线追加,但工程可靠性和适应性有待检验;文献[14-15]从风险角度提出采用主动停电损失代替不确定性导致策略失配带来的停电损失,但在当前电网调控机制下,对供电可靠性的要求极高,难以在工程中实施;文献[16]针对高比例新能源接入后强非线性导致紧急控制策略难以制定甚至失配问题,以切机、切负荷量最少为目标,将紧急控制策略制定描述为包含暂态方程约束的最优控制问题求解;文献[17]提出了一种策略搜索匹配状态机模型来提高策略匹配效率。近年来,基于数据驱动的电力系统暂态稳定评估和控制成为研究热点[18-20],但数据驱动方法的性能高度依赖数据规模和数量,同时也缺乏对结果的解释性,距离工程应用还有较大距离。现有方法大多从离线策略追加或在线策略计算的角度提高紧急控制策略的适应性,降低失配风险,或者提高策略搜索的速度以适应工况的时变性,但离线控制策略作为电网稳定控制的保底手段,这些方法没有从根本上解决单一方式字下的策略失配问题。在“离线决策、在线匹配”紧急控制模式仍为主导的工程背景下,进一步挖掘导致紧急控制策略失配的关键主导因素,对离线紧急控制策略完善和控制装置优化布点具有重要意义。
高比例新能源大电网的状态量呈现强不确定性和强非线性特征,各类因素组合爆炸使得传统依靠人工经验进行方式调整,进而试探获取策略失配主导特征并定义方式字的方法难以为继。本文基于扩展等面积准则(extended equal area criterion,EEAC)理论,分析了节点注入空间变化引起紧急控制策略失配的机理;利用量化分析技术挖掘筛选影响策略失配的主导因素;通过主导状态量的聚合,确定紧急控制扩展方式字,实现基于多状态量特征的紧急控制策略制定,以期提高紧急控制策略的适应性,避免策略失配。
1 紧急控制策略失配的理论分析
1.1 功率注入空间变化引起稳定性变化及紧急控制的机理
某电网的典型结构如图1 所示,X 电网为送端电网,包含传统火电、光伏、风电等多种类型电源,通过断面 S1 向 Y 电网送电PS1。 {P1,P2,…,Pk,…,Pk+n}为X、Y 电网中k+n个电源注入节点的功率注入空间。

图1 某典型电力系统示意图Fig.1 Schematic diagram of a typical power system
断面S1 发生LN双回线N-2 故障,将导致X 电网n台火电机组相对Y 电网机组功角暂态失稳。基于EEAC[21-22](见附录A)将失稳机组划分为领前群S和余下群A,该失稳模式下的等值单机映像运动方程如式(1)—式(4)所示。
式中:M为等值单机的惯量;和分别为S群、A群等值功角加速度;Pm和Pe分别为等值单机机械、电磁功率;Mi和Mj分别为S群第i台机组、A群第j台机组的惯量;Pmi和Pmj分别为第i和第j台机组的机械功率;Pei和Pej分别为第i和第j台机组的电磁功率和̈ 分别为第i和第j台机组的功角加速度。
等值单机映像系统功率-功角曲线如图2所示。
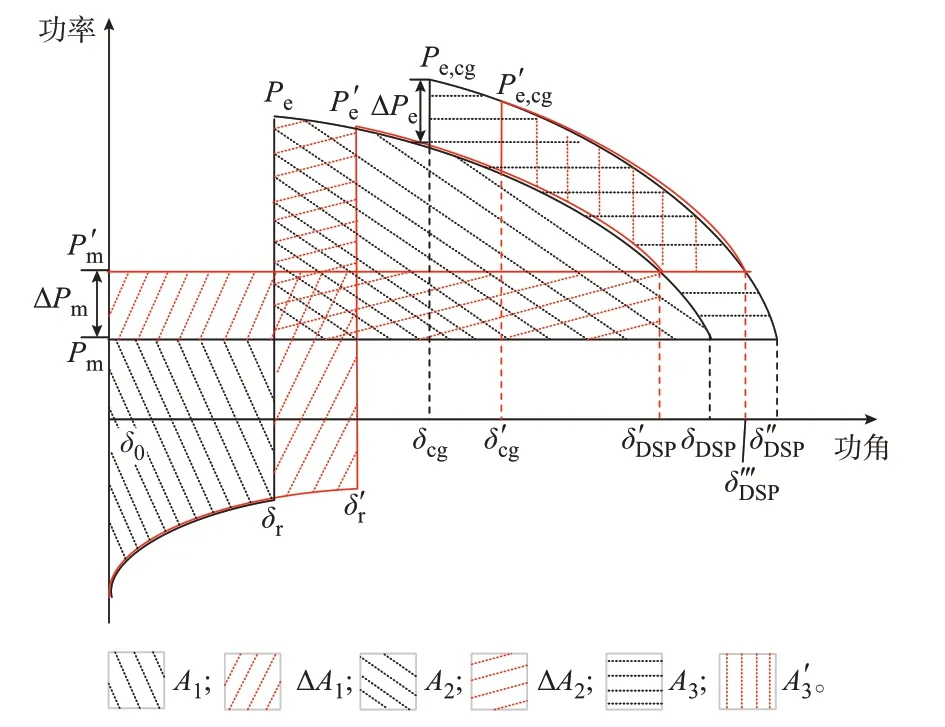
图2 等值单机映像系统功率-功角曲线Fig.2 Power-power angle curves of equivalent single-machine imaging system
系统的功角首摆稳定裕度η1可表示为:
式中:δDSP、δ0、δτ分别为失稳轨迹动态鞍点、等值单机功角初值和故障清除角时刻τ的功角;Adec和Ainc分别为动能减少面积和动能增加面积。
Ainc和Adec即图2 中A1和A2,如式(6)和式(7)所示。
若系统暂态失稳,则η1<0;若系统暂态稳定,则η1>0;若系统临界稳定,则η1=0。
若η1<0,考虑采取紧急控制措施,假设S群接入外送直流,以紧急提升直流功率为例,相当于增大了S群的Pe,增加量为ΔPe,式(1)将转化为:
式中:Pe,cg为采取紧急控制措施后等值单机电磁功率。
此时,系统的功角首摆稳定裕度η2为:
式中:δcg为采取紧急控制措施时的功角;为采取紧急控制措施后失稳轨迹动态鞍点的功角;和A′inc分别为采取紧急控制措施后等值单机系统动能减少面积和动能增加面积。
可见采取紧急控制措施后,等值单机系统的减速面积增加,假设系统恰好保持临界稳定,η2=0,则有:
考虑大容量新能源出力发生不确定性波动,系统的注入空间{P1,P2,…,Pk,…,Pk+n}发生变化,从而改变了式(1)中等值单机映像的安全稳定特性。以S群内新能源向下波动或A群内新能源向上波动为例,考虑该波动量已分别被S群及A群内同步机平衡,使S群总Pm增大或A群总Pm减小,于是等值单机系统机械功率增加,增加量ΔPm为[23]:
式中:ΔPmi和ΔPmj分别为第i和第j台机组的机械功率增加量。
此时,系统的功角首摆稳定裕度η3变为:
考虑采取上述紧急控制措施,式(1)将转化为:
此时,系统的功角首摆稳定裕度η4为:
1.2 工程中紧急控制策略方式字匹配的原理
由于系统稳定性与所有电源功率注入空间状态量大小都有关,紧急控制策略为了准确匹配该运行工况特征,理论上要将所有电源注入功率状态量都作为该工况的方式字,这就需要在安全稳定控制系统中采集海量信息,实时计算量和工程投资都很大,在实际中很难应用。
由于很多电源注入功率通常会经过有限个输电断面汇集,一些参与主导失稳模式机组的出力强相关输电断面故障更容易激发系统失稳[24],且往往成为振荡中心。在工程中,一般选用振荡中心附近输电断面功率状态量作为紧急控制策略的电网工况特征(方式字)。以图1 所示系统为例,原有的紧急控制策略如表1 所示。

表1 原有存在失配风险的紧急控制策略Table 1 Original emergency control strategy with mismatch risk
若断面S1 初始PS1越大,则F1故障发生后系统的加速能量越大,式(5)中的η1越小。在工程中,一般采用按照工程经验调整断面S1 功率尽可能大的恶劣方式,当η1=0 时,系统临界稳定,此时,PS1的值为采取紧急控制措施的启动门槛值,记为。
一旦安控系统监测到电网发生预想故障F1,按照表1 的策略表,若PS1≥则执行控制量为m的紧急控制措施。
1.3 传统单一状态量方式字失配风险分析
在传统电网中,新能源接入比例较低,电网运行方式确定性较强,上述紧急控制策略可依靠人工经验及离线搜索,基于一个或若干个相对“保守”的典型运行方式通过多次时域仿真迭代获得。但在高比例新能源接入后,电源节点注入空间维度很高,出力不确定性增加,运行方式组合呈爆炸式增长,仅采用局部输电断面功率状态量(单一方式字)难以表征整体运行工况特征。如1.1 节中S群内新能源向下波动或A群内新能源向上波动时,考虑该波动被群内其他机组出力补偿,断面S1 功率实际变化可能不大,发生预想故障F1仍可匹配原有策略表方式字,并执行原有紧急控制策略,但此时可能A′′′dec 综上所述,振荡中心附近局部输电断面功率状态量仅仅是该运行方式下所有功率注入空间的因变量,只将该断面功率作为紧急控制策略方式字是工程中的近似处理手段,在理论上存在失配风险。随着新能源的大量接入,电源注入节点维度急剧增加,传统采用粗放的单一汇集断面状态量作为方式字的紧急控制策略失配风险增加。而影响策略失配的主导因素隐藏在高维注入空间中,需要对此进行挖掘。 由前文分析可知,单一方式字的离线紧急控制策略通常对大多数运行工况适配,仅在少数难以预见的特殊运行工况下可能存在失配风险,且引起策略失配的主导因素存在不确定性。因此,策略失配主导因素挖掘不应针对某个特定失配运行工况,而是对离线紧急控制策略在某一时段内进行在线校核,对失配的多个运行工况开展主导因素挖掘。 设CT为在线调控系统在某一时段内的连续时间断面T下的运行工况数据,若对CT和CT+1下预想故障的离线控制策略的校核结果分别为稳定和失稳,说明CT+1下离线控制策略发生失配。 在工况CT的运行点附近,节点注入功率的变化矩阵ΔP与主导系统稳定裕度变化矩阵Δη的关系可描述为: 式中:J为节点注入功率波动引起系统稳定裕度变化的影响灵敏度矩阵;∂ηu/∂Pv为节点v注入功率变化∂Pv对第u个失配策略对应失稳模式裕度变化∂ηu的灵敏度,可由节点v注入功率摄动计算获得,|∂ηu/∂Pv|越大,说明越灵敏;ΔPv为节点v在工况CT和CT+1中的有功功率实际差值;V为注入节点总数;U为失配策略数量。 Δη为J和ΔP的点乘,Δη的矩阵形式如式(24)所示,反映了各注入节点功率变化对各主导稳定模式稳定裕度的影响。 式中:Δηu(v)为节点v注入功率实际变化ΔPv引起第u个失配策略对应失稳模式的实际裕度变化量。 Δη中第u行Δηu如式(25)所示,将各元素取绝对值后,从大到小排序,排序越靠前的元素对失配策略u的影响越大。为了降低维度,从第1 个元素开始,依次将每个元素对应的ΔPv叠加到工况CT中,并对失配策略u对应的预想故障进行时域仿真,直到仿真结果失稳为止。将已叠加ΔPv对应的Δηu(v)元素组成集合|Δη'u|,作为影响策略失配主导注入特征候选序列,如式(26)所示。 式中:|Δη'u|为影响策略失配主导注入特征候选序列;|Δη′u(z)|为第z个策略失配主导特征。 需要指出的是,采用Δη而非直接用J行序列,是因为在实际工程中,某些节点注入功率在策略临界失配运行点附近变化不大,即ΔPv≈0 时,可以忽略Δηu(v)中绝对值很小的元素,有助于降低式(26)的维度,便于工程应用。 在紧急控制策略存在失配风险时,将挖掘出的影响策略失配的主导因素作为新的方式特征用以准确匹配当前运行方式,并调整相应的控制量,可大大降低紧急控制策略失配的风险。但在一段研究时段内(一般为年度或季度)可能存在多个离线控制策略失配的运行方式,每次都将生成如式(26)所示的影响策略失配主导注入特征候选序列,如果将式(26)中每个元素所对应的注入节点功率均作为方式字特征扩展,既不能反映各注入节点间的关联关系,也将造成方式字维度爆炸式增长,无法适用于工程应用。需要在统一基准值和量纲下分析各注入节点对暂态稳定影响的关联程度,对关联程度大的节点分群聚合,获取有限个状态量(如图1 所示断面S2 功率),对原有方式字扩展,即表1 扩展成表2 的形式。表中:PS2为断面S2 功率;为新增状态量;m+a为扩展方式字对应的控制量。 表2 多状态量特征方式字的紧急控制策略表Table 2 Emergency control strategy table of multistate quantity mode word 首先,引入同步机暂态稳定参与因子[21,25-26],其物理意义是量化各同步机对主导失稳模式的参与程度,如式(27)所示。在此基础上,计及非同步机注入节点母线与所有参与失稳模式的同步机的电气距离,获取非同步机暂态稳定参与因子,如式(28)所示。 式中:λsyn,x为第x个同步机注入节点的暂态稳定参与因子;ES,dsp,x为S群第x个同步机注入节点的功角受扰轨迹经过动态鞍点时的加速动能;ES,dsp,max为所有S群同步机经过动态鞍点时加速动能的最大值;λusyn,y为第y个非同步机注入节点的暂态稳定参与因子;Yxy为第y个非同步机注入节点母线与第x个同步机注入节点母线的导纳;X为同步机总数。 本节提出基于节点关联度指标分群聚合的扩展方式字的生成方法,通过计算注入节点对预想故障的暂态稳定参与因子及其关联度指标,对各注入节点进行分群聚合,获取其割集断面,作为扩展方式字,并计算计及该方式字的紧急控制量。具体步骤如下: 步骤1:通过对式(26)中的每个元素对应的注入节点计算其暂态稳定参与因子,并采用式(29)计算注入节点暂态安全稳定参与因子的关联度指标Rp,q。 式中:λp和λq分别为第p和q个注入节点的暂态稳定参与因子。 暂态稳定参与因子所在区间为[-1,1],故Rp,q的值域亦为[-1,1]。若两个注入节点对安全稳定的影响程度越接近,则指标Rp,q越接近于1,表示关联程度越大;反之越接近于-1,表示关联程度越小。 计算式(26)中所有元素对应的注入节点间暂态安全稳定参与因子的关联度R(R为对称阵)如下: 步骤2:初始化分群数量Q=1,并将式(26)中第1 个元素对应的注入节点归入1 号群; 步骤3:对于式(26)中剩余未归入任何群的元素对应的注入节点,将其与某个群O中的所有注入节点间暂态安全稳定参与因子的关联度最大值记为R(O)max,判断R(O)max是否小于Rε(Rε为预先设定用来界定是否属于同一群的门槛值),若是,则总群数Q加1,并将该注入节点加入新群中,否则将该注入节点加入R(O)max最大的那个群中。 步骤4:重复步骤3 直至式(26)中所有元素对应的注入节点均归入某一群中。 步骤5:将注入节点群划分到各自的送出割集断面,若个别节点与其他节点无法划分至同一割集,则将其划分为独立割集,并重复步骤2 至5,直到所有注入节点群均划分到割集中。这些割集断面在策略失配临界点的方式字对应的功率即为扩展的方式字特征。根据该割集断面的计划运行值调整功率分档,基于离线时域仿真计算方式字状态量扩展后的紧急控制量。 在工程实施中,通过建立紧急控制策略失配因素挖掘及方式字扩展系统(简称扩展系统),与电网现有在线综合防御系统独立运行,互不干扰,如图3所示。 图3 紧急控制策略失配因素挖掘及方式字扩展实施方案Fig.3 Implementation plan of mismatch factor excavation and mode word expansion for emergency control strategy 扩展系统首先定义研究时段(一般为季/月度等较长时期),从在线综合防御系统中获取该时段内带时标的在线运行工况滚动数据(一般为状态估计数据,时标周期为分钟级)和在值离线紧急控制策略进行预想故障集的时域仿真校核。需要指出的是,研究时段内带时标的在线运行工况滚动数据不限于在线实时运行工况数据,也可为在线历史运行工况数据。若施加离线控制策略后预想故障集中至少有一个预想故障的时域仿真校核结果为失稳,则判断发生策略失配,进入策略失配的主导因素挖掘流程,当研究时段内所有运行工况均已完成校核,则进入方式字扩展流程,计算方式字扩展后的紧急控制策略。在时效性方面,本文系统从获取运行工况数据到给出推荐的扩展后紧急控制策略的运行周期为分钟级,但由于本文方法和系统定位是针对离线紧急控制策略的查缺补漏,在目前电网调控机制下,最终应用到在值紧急控制策略中还需要运行人员审核决策,故本文系统分钟级工作时间尺度可满足工程应用要求。 本章采用电力系统安全稳定量化分析与优化决策软件(FASTEST),以附录B 图B1 所示某实际电网为例验证本文方法的正确性。高比例新能源送端电网经HM、HMH、YD、DH、QW、JQ、HX、SZ这8 个风火打捆汇集变电站向XB 电网送电。 断面S1 中HX-WS 双回线发生N-2 故障(简称预想故障F1),若不采取紧急控制措施将导致送端电网发电机群相对XB 电网机组暂态失稳。该故障下的离线策略表如表3 所示,典型方式(图4 所示方式A)下断面S1 有功功率(单一方式字)PS1≥4 GW,若发生预想故障,采取切除送端电网2.1 GW机组的紧急控制措施,可保证电网安全稳定。 表3 原有的紧急控制策略Table 3 Original emergency control strategy 图4 方式A 和B 下发生预想故障后系统功角曲线Fig.4 Power angle curve of system after expected fault occurs in modes A and B 但在实际运行中对紧急控制策略的实时校核发现,某些极端运行工况下虽然符合原有紧急控制策略的方式字,但由于新能源出力的强不确定性,在某个出力组合下,预想故障下系统稳定性急剧下降,导致策略失配,即图4 所示方式B。 若按照传统方法挖掘策略失配主导因素并扩展方式字,需要对每个电网注入节点(算例中以8 个注入节点为例,实际工程中数量很多)依次按照一定的步长,人工调整注入功率试探并进行预想事故的时域仿真,找到影响策略失配最灵敏的方向及其失稳边界,其效率极低且容易遗漏。 设在方式A 到方式B 的演变时段内,从在线调控系统中获取的两个连续时间断面o-1 和o下的运行工况分别为Mo-1和Mo,对工况Mo-1和Mo发生预想故障F1下的离线紧急控制策略校核的结果分别为匹配和失配。基于工况Mo摄动计算各汇集站功率对预想故障下主导失稳模式稳定裕度的灵敏度矩阵J。根据国际能源署风电工作组统计数据,单个百万千瓦级风电场分钟级出力波动最大可达300 MW,为了保证摄动计算准确性,取汇集站HM、HMH、YD、QW、DH、JQ、HX、SZ 摄动有功功率大小均为10 MW。 各汇集站在Mo-1和Mo工况下的有功功率如表4 所示,由此计算ΔP向量: 表4 方式Mo-1 和Mo 下汇集站有功功率对比Table 4 Comparison of active power in convergence stations with modes Mo-1 and Mo 计算各断面功率变化影响各主导稳定模式稳定裕度变化量矩阵Δη及|Δη|序列。 取Δηt为J和ΔP各元素绝对值的均值的乘积,如式(35)所示。 取|Δη|序列中元素大于Δηt的元素组成集合|Δη'|,成为影响策略失配主导注入特征候选序列。对应的注入汇集站分别为HM、HMH、YD、QW。需要指出的是,如果直接采用该序列作为紧急控制策略的扩展方式字,则会忽略汇集站内部发电机注入节点的暂态稳定参与因子的差异及其关联程度,挖掘出的扩展方式字将出现偏差。 分别计算汇集站HM、HMH、YD、QW 所包含的发电机的暂态稳定参与因子,如表5 所示。 表5 汇集站包含的发电机暂态稳定参与因子Table 5 Transient stability participation factors of generators in convergence stations 由于R为对称阵,计算时只列出下三角形式,如附录B 式(B1)所示。 设Rε=0.9,根据附录B 式(B1)各发电机暂态安全稳定参与因子的关联度,将注入节点划分为2 个群,并划分割集断面,如表6 和图4 所示。 将划分的割集断面作为紧急控制策略新增方式字,基于离线时域仿真重新计算新的紧急控制策略,如表7 所示。 表7 方式字状态量扩展后的紧急控制策略Table 7 Emergency control strategy after mode word state quantity expansion 通过时域仿真验证了方式字状态量扩展后的紧急控制策略的适应性。如图5 所示,方式A 满足方式字1 的工况特征,发生断面S1 的N-2 故障后,采取切机2.10 GW 措施后系统保持稳定;方式B 满足方式字2 的工况特征,发生断面S1 的N-2 故障后,采取切机2.95 GW 措施后系统同样保持稳定。 图5 方式A 和B 下发生预想故障后系统功角曲线(方式字扩展后的紧急控制策略)Fig.5 Power angle curve of system after expected fault occurs in modes A and B (emergency control strategy after mode word expansion) 本文针对单一状态量方式字离线紧急控制策略在强不确定性电力系统中的失配风险,基于EEAC量化分析理论,揭示了节点功率注入空间变化引起断面主导模式稳定性变化的机理,提出了影响策略失配的主导因素挖掘方法和基于暂态稳定参与因子关联度的主导状态量分群聚合方法,实现了基于多状态量特征的紧急控制策略方式字扩展,有助于提高紧急控制策略的适应性,降低失配风险。通过仿真分析验证了本文方法的有效性,得到结论如下: 1)传统紧急控制策略通常采用振荡中心附近局部输电断面功率状态量作为单一方式字,是工程中的近似处理手段,在理论上存在失配风险,且在强不确定性和强非线性电网中风险更加突出; 2)策略失配的影响因素挖掘应同时考虑策略失配前后各注入节点的实际功率变化量和在临界失配时各节点功率变化对系统稳定性的灵敏度两个权重,有利于从海量注入节点中筛选出影响策略失配的主导因素,降低后续方式字扩展的维度; 3)在方式字扩展方面,提出了注入节点对预想故障的暂态稳定参与因子及其关联度指标, 以量化方式字扩展候选节点对稳定性影响的相近程度,用以分群聚合,并最终划分有限个割集断面状态量特征作为扩展方式字,有利于工程应用; 4)鉴于高比例新能源电网注入节点数量较多,在进行影响策略失配的主导因素挖掘及筛选时,如果对全部注入节点都进行摄动则会导致计算量很大,不利于提高计算速度,这是下一步研究将要解决的问题。 附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。2 策略失配的主导因素挖掘
3 基于多状态量特征的紧急控制策略制定
3.1 多状态量特征的方式字扩展形式

3.2 基于分群聚合的扩展方式字生成及策略制定
4 实施方案

5 算例验证


5.1 策略失配的主导因素挖掘及筛选

5.2 紧急控制策略的方式字扩展



6 结语