农村机动车驾驶人风险驾驶行为研究
2024-01-13沈文泰赵丹
沈文泰 赵丹
中国人民公安大学交通管理学院,北京 100038
伴随我国社会经济的迅猛增长,农村公路在助力地区进步中的重要性逐渐显现。近年来,我国农村公路建设进步显著,大幅提升了出行效率。但农村公路建设取得了长足发展的同时,却仍面临安全驾驶宣传不力、驾驶员安全意识偏低以及道路交通事故多发等问题。这些因素共同造成了出行安全的严重隐患,对农村地区居民的生活质量和出行效率构成了实质性的威胁。根据公安部交通管理局数据显示,我国农村公路发生交通事故接近事故总量的一半,发生重大交通事故的1/3 在农村。以海南省为例,截止2023 年2月,海南全省农村地区发生道路事故起数、死亡人数分别占近三年总数的45.94%、59.13%,其中发生死亡3人以上较大事故起数、死亡人数,分别占近三年总数的61.54%、58.54%.在整个交通系统中,驾驶人往往是交通运行过程中最不稳定的因素之一,我国农村公路技术等级较低、路况复杂、交通安全设施缺乏、机非混行等现象严重,农村复杂的道路环境和交通状况给驾驶员带来了较大的生理和心理压力,不利于驾驶员准确感知道路情况并做出正确反应,增加了驾驶误操作的风险,进而提高了事故发生的概率。2018 年,农民在超速、酒驾、逆行、无证驾驶、未按规定让行等交通违法行为中所占的比例均超过40%,县道、乡村道上车辆与行人碰撞的死亡事故达4000余起,占所有等级道路车辆与行人死亡事故的40%以上。
近年来,国内外学者已经对机动车驾驶人驾驶行为、驾驶心理等驾驶因素以及交通安全宣传方式方法做了广泛的研究,每一种研究方式都各具特色,特点鲜明。在驾驶行为研究方面,李爽[1]通过多维度驾驶风格量表(MDSI-C)和危险行为态度量表(SRBA)发现驾驶行为影响着驾驶安全,同时驾驶行为又受到驾驶态度的影响。赵亮[2]通过对在农村地区不同路段驾驶时驾驶人的操作行为进行统计,分析驾驶人的心理生理因素,得到驾驶人驾驶行为变化的规律。Reason 等[3]通过对曼彻斯特驾驶行为问卷的三个问卷因子的分析,进而考察驾驶人驾驶行为。丛浩哲等[4]通过驾驶人行为规范度的形式分析驾驶行为。Browne等[5]通过卡特尔(Catell)的16PF 量表对出现违章的驾驶员进行测试,结果表明这些驾驶员相比于其他驾驶员更容易冲动,驾驶时更容易出现紧张情绪。侯雪艳[6]通过对驾驶人人格与驾驶行为的研究,认为人格会对驾驶行为造成影响,只不过这种影响往往通过其他因子加以显现,比如驾驶人安全态度等。Godley[7]比较了真实驾驶和模拟驾驶中驾驶员对速度“感知-认知-反应”过程,发现驾驶员在模拟驾驶中的主要速度操作指标与实路驾驶中基本一致。何莎等[8]验证了雾天时速度对驾驶风险将会产生重大影响。吴超仲等[9]发现当驾驶人出现疲劳驾驶的情况时,更加容易保持在高速行驶的状态。在计划行为理论(TPB)方面,方晓平等[10]利用计划行为理论(TPB)探索心理因素对公共交通交通工具选择的影响。
国内外对于机动车驾驶人风险行为的研究主要集中在高速公路以及普通驾驶人方面,目前对于农村机动车驾驶人的驾驶行为研究尚不够全面,还需要进一步深入探索。同时,在对农村机动车驾驶人风险驾驶行为的研究方面也存在深入不足的问题,需要加强研究深度和广度,特别是对致因因素的研究。因而,本文基于问卷调查数据,探索驾驶人心理因素与驾驶行为风险之间的关联性,评估我国农村地区驾驶人交通安全意识和风险认知水平,研究对我国农村机动车驾驶人影响最大的风险因子。
1 计划行为理论与建模方法
1.1 计划行为理论
计划行为理论(TPB)是一种用于预测和解释个体行为的心理学理论,其框架图如图1 所示。该理论的核心是个体的行为意图,受到个体的态度、主观规范和知觉行为控制因素的影响,进而影响个体的实际行为。计划行为理论在驾驶领域得到广泛应用,尤其是在探究驾驶违规行为方面。这些违规行为包括攻击性驾驶、酒后驾车、超速行驶等不安全驾驶行为[11]。

图1 计划行为理论基本结构
为了准确刻画多维驾驶影响因素与农村机动车驾驶人驾驶行为的关联关系,本文的行为定义为“农村机动车驾驶人在实际驾驶情景中可能出现的危险驾驶行为”,并结合有关学者针对驾驶人驾驶行为与心理的研究,划分四个构面因子,本文在TPB 理论范式的基础上通过风险感知、驾驶信心、安全态度对其风险驾驶行为进行描述,理论范式结构如图2所示。
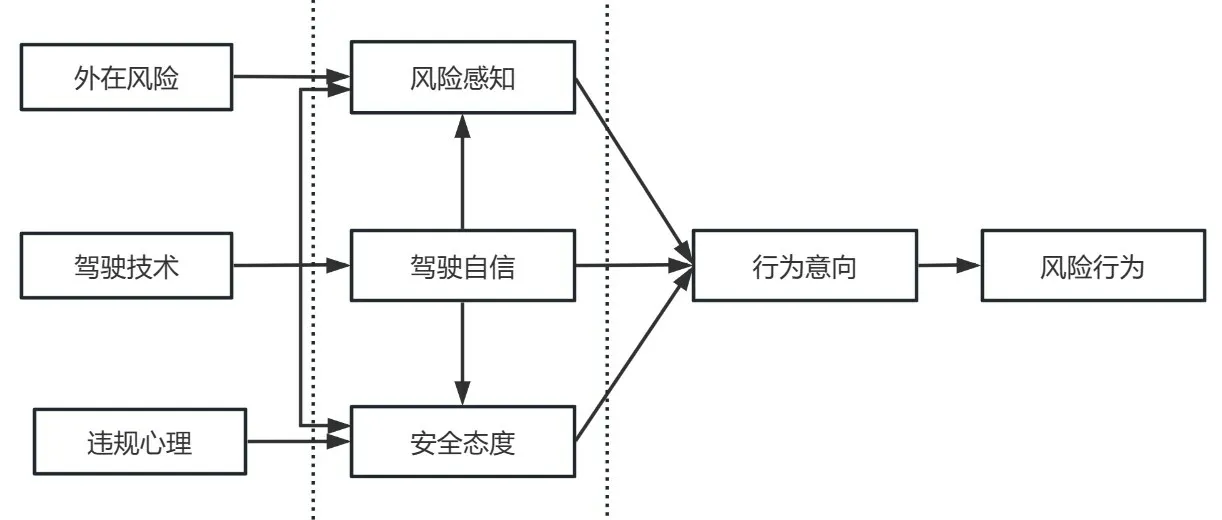
图2 基于计划行为理论的风险行为模型
1.2 结构方程模型
结构方程模型(Structural Equation Modeling,SEM)是一种常用的多元统计技术,它融合了因素分析和路径分析,是社会科学研究中的一个重要方法,分为测量模型(measurement model)和结构模型(strutural equation model)。测量模型的主要作用在于建立外显变量与对应的潜变量之间的关联,并通常采用验证性因子分析模型(Confirmatory Factor Analysis,CFA)来实现。验证性因子分析模型常被应用于检验潜变量的因子结构,是一种广泛使用的方法。结构方程模型是一种用于分析因子之间因果关系的工具,能够确定影响因素。相较于传统的路径分析方法,结构方程模型考虑了显性变量的测量误差,因此能够更加准确地估算潜在变量之间的关系[12]。
数据的计算,如初阶因子负荷,参照Stawart David W(1981)制定的结构方程因子计算方法进行,从而对理想模型进行评估[13]。
测量方程是一种用于描述测量变量与潜在变量之间关系的验证性因子分析模型。它包含两个方程式,其中第一个方程式描述了内生潜在变量与内生可观测变量之间的联系,第二个方程式描述了外生潜在变量与外生可观测变量之间的联系。该模型可帮助研究人员分析和解释数据,了解变量之间的关系。其模型形式为:
其中,Y(q×1)为内生潜变量η的显变量构成的向量,X(q×1)为外生潜变量ζ 的显变量构成的向量;Λy是Y 在η 上的因子载荷矩阵;Λx是X 在ζ 上的因子载荷矩阵;δ 为q×1 阶测量误差向量,ε 为p×1 阶测量误差向量,δ、ε表示不能由潜变量解释的部分。
结构方程是表示因子之间因果关系的模型,方程沟通了潜在变量和观察变量,同时也将内生潜在变量与外生潜在变量联系起来,其方程为:
其中,η(m×1)是由内生潜在变量构成的向量;B(m×m)是内生潜变量向量η 的系数参数矩阵,即内生潜变量间的通径系数矩阵,ζ(n×1)是外生潜变量构成的向量,Г(m×n)是外生潜变量向量的系数参数矩阵;σ(m×1)为残差向量,是模型内未能解释的部分。
1.3 变量划分
在计划行为理论和相关研究的基础上构建了风险感知、驾驶信心、安全态度和风险行为这4个潜在变量和21 个观测变量在内的测量体系来分析农村机动车驾驶人风险驾驶行为的心理影响因素,各变量具体描述如表1所示。

表1 潜在变量与观测变量
1.4 结构方程模型构建
结合国内外机动车驾驶者风险驾驶行为的现有研究,本研究充分考虑农村机动车驾驶者的特定驾驶模式,建立了包含驾驶信心、安全态度、风险感知、风险行为的结构方程模型。其中,驾驶信心、安全态度、风险感知这3 个因素作为外生潜变量,影响着唯一的内潜变量,即风险行为。
本文建立的结构方程模型中包含两层因子结构:农村机动车驾驶人风险驾驶行为和其可能影响因素共提取的10个因子为初阶因子,驾驶信心、安全态度、风险感知、风险行为为10 个初阶因子构成的高阶因子。以收集到的与初阶因子相对应的数据作为观察变量,按照模型路径假设,提出农村机动车驾驶人风险驾驶行为理论模型,如图3所示。

图3 模型路径假设图
2 数据来源与描述性统计
2.1 数据采集
通过查阅文献和实地考察,本文针对我国驾驶人的驾驶特点进行问卷设计,选项采用李克特(Likert)五点计分法,其中1 代表“非常不同意”,2 代表“不同意”,3 代表“一般”,4 代表“同意”,5 代表“非常同意”。本次调查共回收436份问卷。因调查对象为农村机动车驾驶人,因此在数据清洗时,删除了与本次调查不相关、内容不合理的数据。经过筛选,最终确定用于后续分析的调查问卷共366 份,占原调查问卷总数的83.94%,受访者基本情况如表2所示。
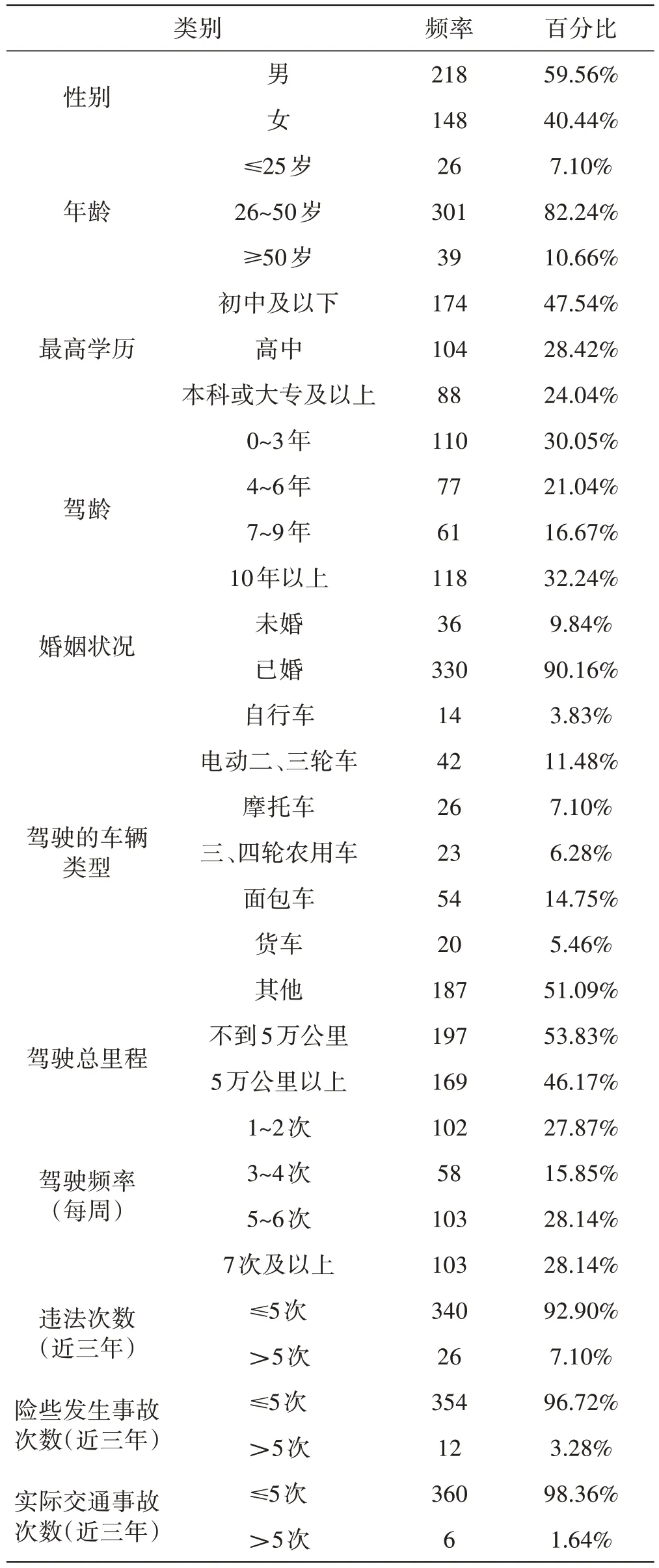
表2 受访者基本信息分布情况
2.2 信效度检验
信度(Reliability)分析是一种用于评估测量工具或问卷的一致性和稳定性的方法。它通过检测量表内部的一致性和稳定性来确保测量结果的准确性和可信度。多种常用的方法都可以用于信度分析,比较常见的有折半信度法以及克伦巴赫α 系数法(Cronbach’s alpha)[14]。本文采用Cronbach’s alpha 系数进行信度检验。某些学者的研究结果表明,如果系数的值大于0.6,那么该问卷的可信度相对较高[15]。
使用SPSS20.0 软件进行信度检验。根据表3 所示,本研究所涉及的4 个心理潜变量的克伦巴赫系数为0.636 至0.866。这表明,该问卷的测量结果具有较高的可信度。

表3 各因子内部一致性系数(Cronbach’s alpha)
为了判断问卷测量结果的真实性和有效性,通常会使用效度判别方法。而通过KMO 值进行初步判断也是常见的做法,一般要求KMO 值不低于0.5。为保证因子分析的有效性,本研究采用了SPSS20.0软件进行了效度检验,其中包括了KMO 检验和Bartlett 球形检验两种方法。为了通过效度检验,必须满足两个条件:KMO 检验系数必须大于0.5,而Bartlett检验的P值必须小于0.05。分析表明,本问卷KMO 值为0.733,介于0.7~0.8 之间,研究数据适合提取信息(从侧面反映出效度较好),P为0.000。
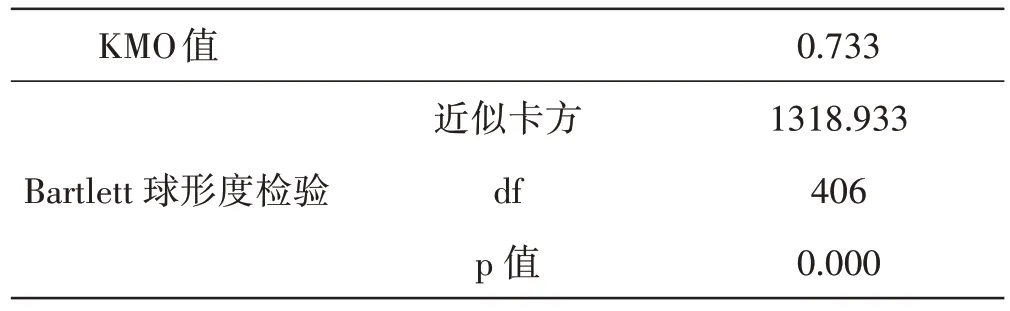
表4 KMO和Bartlett的检验
2.3 因子描述性统计
为对问卷所得数据进行进一步分析,首先对四个潜在变量进行描述性统计,如表5 所示。最大似然估计法要求结构方程的变量分布服从正态分布。通过K-S 检验,可以发现除风险行为因子之外,其他因子的数据均符合正态分布。

图4 调查量表数据分布直方图

表5 问卷因子描述性统计
风险行为因子的p 值为0.000,小于0.05,不符合正态分布要求,但正态性检验要求严格,通常无法满足,如果数据的峰度绝对值小于10并且偏度绝对值小于3,即使不符合正态分布的要求,也可以被认为是基本符合正态分布[16]。驾驶行为因子的偏度绝对值为1.557,峰度值为2.455,因此基本可接受为正态分布。

表6 各因子的Kolmogorov-Smirnov检验
3 模型检验
3.1 模型评价
使用Amos 软件建立农村机动车驾驶人风险驾驶行为结构方程模型,并将数据导入进行整体拟合度检验。常用的拟合指标主要包括卡方比自由度(X2/df)、近似误差均方根(Root Mean Squared Error of Approximation,RMSEA)、相对拟合指数(Comparative Fit Index,CFI)、标准拟合指数(Normed Fit Index,NFI)、递增拟合指数(Incremental Fit Index,IFI)等[17-19]。模型评价结果如表7所示。

表7 假设结构方程模型整体模型适配度检验结果
该模型检验结果显示假设的结构方程模型与观察所得数据自由度、卡方值以及二者比值均满足模型标准要求,但近似误差平方根和标准拟合指数分别大于0.05、小于0.9,超出了对应指数分析标准要求,证明该理论模型与观察数据拟合程度低,不满足分析条件,需要对初步理论模型进行进一步的修正。
首先,通过皮尔逊相关系数(Pearson correlation coefficient)对四个高阶因子进行相关性分析,分析结果如表8 所示。结果显示,除风险感知-安全态度路径显著性不高外,其他路径在95%显著水准情形下,均达到显著水平。

表8 高阶因子相关性检验结果
其次,通过AMOS 软件对结构模型进行参数估计,结果如表9 所示。结果显示安全态度因子下的初阶因子“从众心理”与安全态度之间没有显著的相关性,在理论模型中应予删除。且理论模型中的数据显示,风险行为因子下的初阶因子“追求刺激”以及安全态度因子下的初阶因子“从众心理”负荷分别为0.245、0.285,不符合应大于0.5的负荷要求[17]。
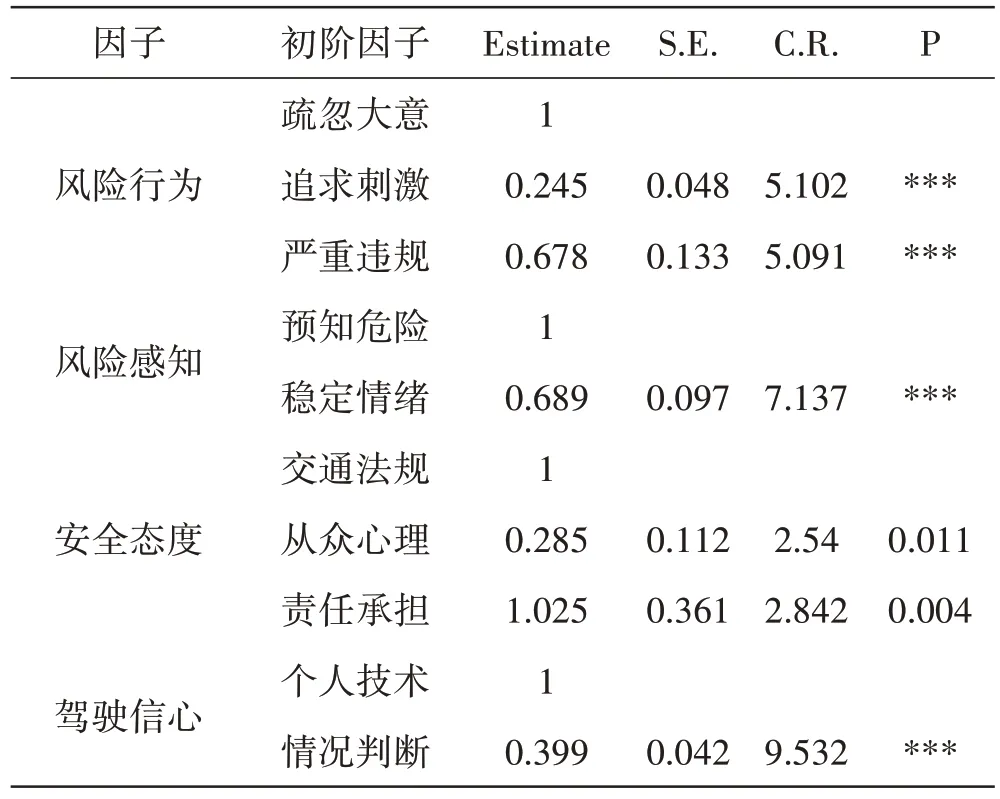
表9 模型参数评估结果
3.2 模型修正
由于安全态度因子下的初阶因子“从众心理”与安全态度之间没有显著的相关性,且风险行为因子下的初阶因子“追求刺激”以及安全态度因子下的初阶因子“从众心理”负荷不满足分析要求,因此对模型进行调整,对相关初阶因子进行删除处理。另外,根据相关性分析的结果,在四个高阶潜在因子之间,风险感知-安全态度路径显著性不高,删除后可以提高模型的拟合度,修正后的模型如表10、图5所示。

表10 修正结构方程模型整体模型适配度检验结果

图5 风险驾驶行为结构模型拟合结果
4 结果分析
通过农村机动车驾驶人风险驾驶行为结构方程模型,可运用标准化路径系数及荷载系数的结果,对结构方程模型进行适当的解释。此举不仅能够分析变量之间的因果关系或相关关系,还能明确变量之间相互作用的强弱。除此之外,在结构方程模型中,变量之间的关系可以分为直接关系和间接关系两类;而变量之间的作用效果则是所有直接效果和间接效果之和。在直接关系中,路径系数即为因果关系的直接效果;而在间接关系中,变量之间的间接效果为关系路径系数的乘积[21]。
4.1 驾驶信心-风险行为路径分析
农村机动车驾驶人的“驾驶信心”对“风险行为”的直接效果显著,其直接影响值为-0.61,即每当驾驶信心分值提高1 分,则风险行为的得分降低0.61 分。除直接影响外,驾驶信心也会对风险行为产生其他间接影响,即通过驾驶信心-风险感知-风险行为(RA1),以及驾驶心-安全态度-风险行为两条路径(RA2),对风险行为产生影响。RA1 路径影响数值为0.3515(0.95×0.37),RA2 路径影响数值为0.1184(0.37×0.32),故RA1+RA2=0.4699。“驾驶信心”对“风险行为”的间接影响数值为0.4699,故“驾驶信心”对“风险行为”的直接影响为-0.61。每当“驾驶信心”提高一分时,“风险行为”则会降低0.1401分。
故农村机动车驾驶人驾驶信心的提高,会降低驾驶行为规范的程度,提高驾驶风险。
4.2 风险感知-风险行为路径分析
农村机动车驾驶人的"风险行为"受到"风险感知"的影响是非常显著的,根据结构方程模型,“风险感知”仅会对“风险行为”产生直接影响,而风险感知-风险行为路径显示数值为0.37,即当农村机动车驾驶人“风险感知”分数提高1 分,则会提高“风险行为”得分0.37分,其效果是非常显著的。
在除“风险行为”的其他三项因子中,“风险感知”与“风险行为”关系最为密切,农村机动车驾驶人“风险行为”受“风险感知”的影响也是最大的,因此,可以考虑从这个方面入手来制定提高农村机动车驾驶人安全意识的方案,进而减少风险行为出现的频率。
4.3 安全态度-风险行为路径分析
根据结构方程模型显示,“安全态度”因子对“风险行为”因子只有直接影响,并没有产生间接影响的路径,而安全态度-风险行为路径显示数值为0.32,即“安全态度”因子提高1 分时,“风险行为”因子得分将会提高0.32分。
在“安全态度”因子与“风险行为”因子的相关性显著的情况下,分析可知“安全态度”会对“风险行为”产生一定的影响,在提高农村机动车驾驶人交通安全意识的策略中可以加以体现。
5 结语
针对农村机动车驾驶人交通安全风险行为,本文通过结构方程模型进行数据建模与分析,得出如下结论:
(1)风险感知对风险行为会产生显著的直接影响,随着风险感知能力的提升,风险行为降低明显。
(2)安全态度-风险行为路径呈现为正值,说明安全态度的提升会降低风险行为水平。
(3)农村机动车驾驶人驾驶信心对其风险行为有着较高的直接影响和间接影响,总的来说,驾驶信心-风险行为路径数值呈现为负值,当驾驶信心程度提高时,反而会提高行为的风险性。
(4)“驾驶信心”因子中,个人技术对农村机动车驾驶人的影响偏重,情况判断能力的影响相对较轻。同样,在“风险感知”“安全态度”“风险行为”中,预知危险、责任承担、疏忽大意分别对三个因子产生主要影响。
(5)本研究仍有不足之处。如样本量不算充足,问卷调查所获取的数据存在主观偏差,与实际情况可能有一定出入,且除本文研究的影响因素之外,不排除还有其他因素的存在,这将对结果产生一定影响,后续研究中可以考虑扩大样本收集范围,并对其他影响因素进一步明确。
