UUV 冲压活塞式装置发射鱼雷内弹道特性研究
2024-01-13杨弓熠郭良蛟刘国庆
杨弓熠,詹 磊,贾 轩,郭良蛟,刘国庆
(中国船舶集团有限公司 第705 研究所昆明分部,云南 昆明,650101)
0 引言
无人水下航行器(unmanned undersea vehicle,UUV)集侦查、探测、协同及攻击等多功能于一身,对我国海防事业具有重要战略意义。目前,针对UUV 领域发射技术应用成果尚处于空白,传统的发射装置无法直接应用于UUV 中: 自航式发射装置由于无动力对鱼雷发射后的安全性和操控性存在较大的挑战;气动不平衡式发射装置隐蔽性差且对UUV 姿态平衡能力要求较高;气水缸式发射装置体积及质量较大;涡轮泵式发射装置结构复杂且密封技术要求较高;电磁式发射装置体积较大且对能耗功率要求较高[1]。鉴于UUV 发射装置在保证发射动力和隐蔽性的前提下,还需满足体积小、质量轻及结构简单的要求,文中创新性地提出了一种液压缸-冲压活塞-栅状管式鱼雷发射装置。该装置体积小、质量轻且结构简单,发射动力可依据设计调节,以液压为驱动可实现低噪无泡发射,大幅提升了UUV 自身的隐蔽性。
为评估该装置发射鱼雷过程的动力特性,需开展水下发射内弹道理论及仿真研究。在已有研究中,秦楠等[2]对后端自流补水的自航发射鱼雷内弹道进行了理论研究,得出自航发射出管速度较低,不能满足作战需求及安全性要求;马辉等[3]采用滑移网格+层铺动网格技术对弹簧活塞式装置发射鱼雷内弹道进行了计算流体力学(computational fluid dynamics,CFD)仿真。由于研究对象有所不同,现有研究成果无法获得液压缸-冲压活塞-栅状管式鱼雷发射装置内弹道特性。文中基于流体动力学和内弹道理论,建立了该装置发射鱼雷动力学模型,获得了冲压活塞前后端压力特性及发射鱼雷内弹道特性,并经CFD 仿真验证了该模型的可靠性。
1 发射系统模型
UUV 发射系统主要由水舱及多具发射管组成,文中以1 具发射管为例(其余为空管),如图1所示。水舱前后各开有2 个入口,用于平衡外部水压及对水舱补水。发射管上开有4 个特形孔及若干栅状孔,用于对发射管进行补水,减少冲压活塞式装置发射鱼雷过程中的压差阻力。

图1 UUV 发射管样式及布局Fig.1 Style and layout of launcher for UUV
冲压活塞式鱼雷发射装置由发射管、鱼雷及活塞组成,其结构示意图如图2 所示。发射时,活塞按照液压缸[4]输出规律往前运动,由于水体不可压缩,活塞通过挤压鱼雷后腔的水体推动鱼雷向前运动。活塞向前运动过程中,发射管内活塞后腔产生负压,发射管外的水通过补水孔不断进入以平衡负压产生的影响,减小活塞运动过程中受到的压差阻力,从而提高活塞的做功效率,保证鱼雷的出管速度。
发射时,发射管补水流道如图3 和图4 所示。活塞运动时,一方面主要关注活塞后腔的压力和发射管外部环境压力的压差,从而评估液压缸的推力是否能克服活塞运动产生的负压,保证鱼雷以预定的速度出管;另一方面,在活塞挤压水体推动鱼雷出管过程中,鱼雷后腔的膛压作用于活塞产生一定的阻力,该部分力也是在设计液压缸时需考虑的因素。综上两部分因素为文中计算模型需求解的内容。

图3 发射管横截面补水流道Fig.3 Water flow channel of launcher on cross section

图4 发射管轴截面补水流道Fig.4 Water flow channel of launchtube on shaft section
2 UUV 冲压活塞式装置发射鱼雷内弹道特性
2.1 活塞后腔压力特性
当活塞运动时,水流将如图3 和图4 所示流入发射管内部,针对截面1-1 和截面2-2,根据伯努利方程可得到活塞后端面与水舱外海洋环境之间的压力变化规律为
式中:P1和P2分别为截面1-1 和截面2-2 的水流静压;V1和V2分别为截面1-1 和截面2-2 的水流速度;h∗为沿程阻力和局部阻力所导致的压力水头损失;等式右边第4 项为惯性力所引起的压降变化。
式中: ∆Pyc为沿程阻力,主要由水流的粘性和壁面的摩擦造成;∆Pjb为局部阻力,主要由水流经过水舱入口和特性孔时截面突然的收缩与扩张导致压力急剧变化所形成。
沿程阻力由Darcy 公式计算[5]
式中,f为阻力系数;L为水流通道长度;D为水流通道截面直径。
按照Prandtl 提出的阻力计算公式
局部阻力主要由截面的突缩和突扩所造成,对于截面的突扩和突缩(见图5 和图6),文献给出的压力损失计算公式如下[6-9]。
图5 截面突扩压降变化情况Fig.5 Variation of pressure drop for cross section surge

图6 截面突缩压降变化情况Fig.6 Variation of pressure drop for cross section shrink
1) 截面突扩
截面突扩产生的静压差为
对于完全发展的湍流,K可简化成Borda-Carnot关系:K=(1-σ)2,其中,σ为面积比,文中计算根据经验系数取值为0.1。
2) 截面突缩
对于完全发展的湍流流动,截面突缩产生的静压差为
式中,Cc为面积收缩系数,是关于面积比的函数,按照Geiger 公式可得
根据某液压缸在一定负载下的设计输出曲线作为活塞运动速度计算输入曲线,如图7 所示。该曲线第1 段为匀加速运动,第2 段为变加速运动,第3 段为减速运动。

图7 活塞运动速度计算输入曲线Fig.7 Curve of piston velocity as input of calculation
以上述活塞运动速度作为输入求解伯努利方程,得到活塞后端面与外部海洋环境之间压力差随时间历程变化曲线如图8 所示。

图8 活塞后端面与外部环境压降随时间变化情况Fig.8 Variation of pressure drop between piston rear face and external environment with time
由图8 可以看出,0.02 s 之前由于活塞作匀加速运动,产生的惯性力恒定,且初始阶段速度较小,动压及阻力损失变化不大,因此活塞后端面与外部环境之间存在较为恒定的负压力。0.02 s 作为初始阶段加速度转折点,该点前后加速度存在较大差值,因此产生较大的惯性力,活塞后端面产生较大的负压(相对外部环境压力)。在0.02~0.42 s之间,速度逐渐增大,加速度逐渐减小,因此动压、沿程阻力和局部阻力作用导致的静压变化量增加,惯性力导致的静压变化量减小,二者共同作用表现为活塞后端面产生的负压值减小。0.42 s 之后,由于活塞突然作减速运动,加速度存在较大差值,因此压降曲线急剧增加,活塞后端面产生较大的正压力,表现为对活塞的水锤效应。
通过图8 可以看出,活塞运动过程中后端面产生的最大负压约为0.27 MPa,该值为设计液压缸时所需考虑的重要参数,用于评估液压缸的推力是否满足要求。
2.2 发射内弹道特性
活塞运动时,将挤压鱼雷后腔的水体产生膛压Pt推动鱼雷出管,鱼雷运动过程中受到阻力Fd以及鱼雷运动时发射管内外之间水体流动(栅状管段处鱼雷头部运动排水和尾部运动补水)所导致的压差阻力Fb的影响。因此,鱼雷运动受力为
式中:mt为鱼雷质量;at为鱼雷加速度;At为鱼雷横截面积;,其中Cd为鱼雷阻力系数,ρ为海水密度,Vt为鱼雷运动速度。
根据海水不可压缩原理,当鱼雷还没运动到栅状孔时,鱼雷速度可近似通过活塞运动产生的流量守恒原则确定。当鱼雷尾部运动到栅状孔时,根据活塞运动产生的流量近似等效为鱼雷运动产生的流量+栅状孔补水产生的流量的守恒原则确定鱼雷速度。发射内弹道理论计算结果如图9 所示。
图9 发射鱼雷内弹道计算结果Fig.9 Calculation results of interior trajectory during torpedo launching
由图9 可以看出,当活塞运动0.42 s 达到最大速度13 m/s 时,鱼雷运动至最大速度14 m/s,鱼雷运动位移为3.87 m。分析可知,0.42 s 之后活塞作减速运动,为减小鱼雷运动的压差阻力,需要发挥栅状孔的补水功能,如果鱼雷后腔未能及时补水,将产生较大的负压使鱼雷产生向后的吸力,所以当活塞作减速运动时,鱼雷尾部应运动至栅状孔区域,因此0.42 s 时鱼雷的位移值将作为设计栅状孔位置的重要依据。根据膛压曲线可以看出,鱼雷运动过程中受到的最大膛压约为0.16 MPa,该值亦为设计液压缸时所需考虑的重要参数,结合活塞后端压力曲线,两部分共同作用结果用于评估液压缸的推力是否满足要求。
综上[2,4,10],液压缸输出压力应满足图10 所示曲线(表现为活塞前后端压力负载,即图8 和图9(b)曲线之差),图中主要关注负压峰值,该值为液压缸输出需要克服的压力,因此液压缸的输出压力至少应保证为0.43 MPa。正压主要为活塞减速时水锤效应导致的压力激增,主要涉及活塞抗冲击强度的要求,不涉及对液压缸能量输出的要求。
图10 发射过程中活塞运动所受压力曲线Fig.10 Pressure of piston motion during launching
3 仿真结果与分析
CFD 仿真采用QFLUX 软件进行,几何模型如图11(a)、(b)所示,为保证计算收敛性,需提高网格质量,经ICEM(integrated computer engineering and manufacturing)划分结构网格如图11(c)所示,网格数量约为500 万。

图11 CFD 仿真模型Fig.11 Simulation model of CFD
仿真过程为水下冲压活塞式装置发射鱼雷过程,因此,计算域属性设置为不可压缩的水,活塞和鱼雷表面设置为运动刚体壁面,其余结构表面设置为静止壁面。上述运动过程仿真采用滑移网格和弹簧光顺动网格方法实现。滑移网格需将计算域划分为静止区域和运动区域,上述区域通过交界面进行数据传递,运动区域内采用弹簧光顺的方法实现网格运动。活塞运动速度按图7 所示曲线设置,鱼雷运动按6 自由度模型进行设置。
为仿真水下发射环境,对外流场域设置速度入口(0 m/s)和压力出口(仿真10 m 水深压力),并按上述设置初始化整个流体域。
控制方程按照CFD 基本方程连续性方程和动量方程进行求解,湍流模型采用剪切应力传输模型(shear stress transfer,SST)k-ω模型。
通过CFD 仿真得到活塞和鱼雷运动位移曲线如图12 所示,可以看出运动0.42 s 时,鱼雷运动位移约为3.9 m,与理论计算的3.87 m 基本吻合,该数值为设计栅状孔位置提供了重要依据。

图12 活塞和鱼雷运动位移曲线Fig.12 Displacement of piston and torpedo movement
通过CFD 仿真得到活塞和鱼雷运动速度曲线如图13 所示,图中鱼雷运动0.42 s(对应的发射管内流场分布特性如图14 所示)获得最大速度14.2 m/s,与理论计算结果14 m/s 基本吻合,从而通过CFD 仿真验证了内弹道理论计算的有效性。

图13 活塞和鱼雷速度曲线Fig.13 Velocity of piston and torpedo
图14 活塞运动0.42 s 流场分布特性Fig.14 Flow field distribution characteristics at 0.42 s of piston movement
图15 为活塞运动0.42 s 时,补水舱及发射管后段速度场流线特性分布,其中截面1-1 和2-2 为发射管纵、横截面,截面3-3 为中间两筒所在纵截面,截面4-4 为左侧筒所在纵截面。通过流线可以看出,水体从补水舱下方2 个补水孔进入,补水舱内存在圆筒绕流进入发射管,沿发射管方向流出。
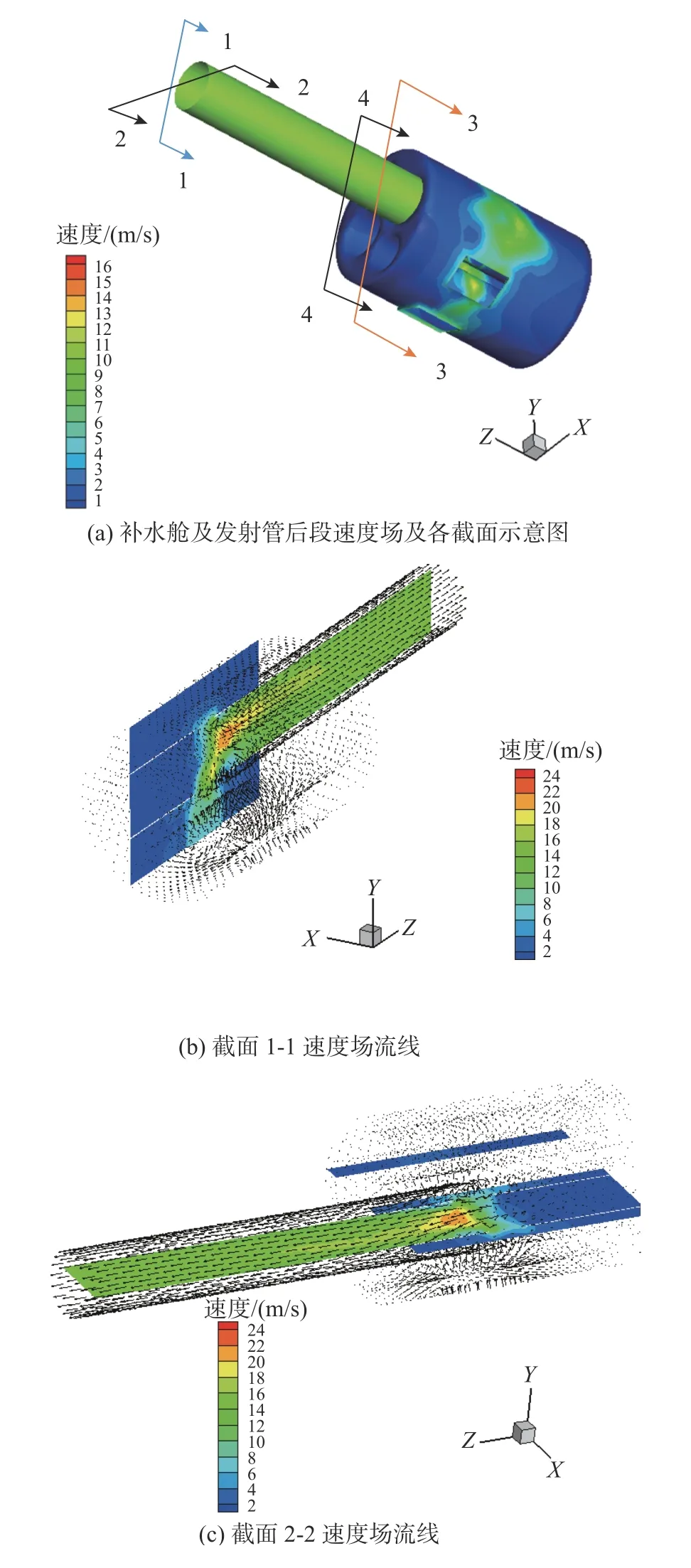
图15 活塞运动0.42 s 速度场流线特性分布Fig.15 Streamline characteristic distribution of velocity field at 0.42 s of piston movement
活塞受力曲线如图16 和17 所示,可以看出活塞受力曲线的振荡波动比较大,其主要原因是流动的非定常性突出,特别是鱼雷与发射管环向间隙流等原因容易产生瞬态冲击力;另一个原因是数值计算的收敛性导致出现高频的振荡成分。虽然活塞受力曲线存在振荡成分,但主要成分稳定,因此不影响活塞受力整体趋势。

图16 活塞后端面压力曲线Fig.16 Pressure of piston rear

图17 发射膛压曲线Fig.17 Chamber pressure for launching
通过CFD 仿真结果显示,运动初期,活塞后端面产生约0.27 MPa 的负压,活塞减速时后端压力峰值急剧上升至0.77 MPa,活塞推水产生的膛压约0.15 MPa,CFD 仿真结果与理论计算结果基本吻合,且活塞后端面压力曲线和发射管膛压曲线与理论计算曲线的趋势基本吻合,从而通过CFD仿真验证了理论计算的有效性。
4 结论
文中创新性地提出了一种液压缸-冲压活塞-栅状管式鱼雷发射装置,为评估该装置发射鱼雷过程的动力特性,开展了相关理论及仿真研究,研究结论如下:
1) 建立了液压缸-冲压活塞-栅状管式装置发射鱼雷动力学模型,以液压缸速度为输入,获得冲压活塞前后端压力特性、发射鱼雷内弹道特性,经对比验证,理论计算与CFD 仿真结果基本吻合,由此表明所建立模型的可靠性;
2) 冲压活塞前后端压力特性表明冲压活塞运动过程中产生的最大阻力约为0.43 MPa,为满足液压缸速度输入,可为液压缸输出压力及功率提供设计依据;
3) 发射鱼雷内弹道特性表明冲压活塞运动0.42 s 后作减速运动,此时鱼雷运动约3.9 m,为减小鱼雷后续管内运动时的压差阻力,对栅状管孔位进行优化以提升补水能力,从而提高发射装置的做功能力。
现阶段仅完成了理论及仿真研究,待原理样机完成后,将进一步开展水池发射试验,验证该装置的发射能力及可靠性。
