基于一维卷积神经网络的舰船尾流检测
2024-01-13杨长生苟文博
杨长生,苟文博,梁 红
(西北工业大学 航海学院,陕西 西安,710072)
0 引言
舰船在航行过程中,其尾部会产生含有大量气泡的湍流。声学检测尾流由于检测概率大、抗干扰能力强及导引距离远等优点,成为探测舰船尾流的有效方式[1]。
国内外学者对尾流声检测开展了大量的研究,并提出相关的检测算法,大多采用在提取特征后进行检测[1-3]。人工提取特征需要具备一定的专业知识,在提取特征过程中也不可避免会丢失部分信息,导致基于特征提取的检测方法鲁棒性和泛化性较差。
深度学习使用多个层逐步从原始输入中提取更高级别的特征,并将传统的提取后分类识别的算法整合到一个端对端的分类模型[4]。在图像处理中,深度学习方法已展现出泛化性和鲁棒性的能力[4-6]。
针对此,文中提出一种基于一维卷积神经网络(one dimentional convolutional neural network,1DCNN)的舰船尾流检测算法。首先通过舰船尾流散射回波模型构建仿真数据集,然后通过水箱仿真实验验证模型的可靠性并构建实验数据集,最后搭建了1DCNN并在数据集上训练和优化,并与基于单分类支持向量机和反向传播(back propagation,BP)神经网络的传统算法进行对比分析。
1 数据集构建
尾流散射回波数据集若完全依赖外场实验,成本较高,因此文中采用理论建模加仿真实验验证的方式来构建有效数据集。
1.1 尾流散射回波模型
尾流的声学特性主要由尾流中的气泡决定,考虑每一个气泡对于声波的散射作用,采用点散射模型建立尾流散射回波模型[7]。设尾流气泡密度函数为 ρ(r,θ,φ,a),表示在位置 (r,θ,φ)处,单位体积内含有半径a(R(1)-R(N))的气泡数量。对于体积为V的尾流中所有气泡的多体一次散射回波为
若位于 (r,θ,φ)处气泡的激励信号为
则接收换能器接收到半径为a气泡的散射回波为
式中:p(t)为 声源发射信号;D1(θ,φ)和D2(θ,φ)分别为发射阵列和接收阵列的指向性函数;f(r)为传播损失。
根据Keller-Miksis 方程[8]可得距离气泡1 m处辐射声压为
考虑尾流中气泡云的多体多次散射,通过修正多体一次散射气泡云的入射场为多体多次散射后的等效入射场,可将多体多次散射问题转化为多体一次散射问题[9]。故修正多体一次散射中气泡的激励信号为
式中,A为修正幅度,φ′为修正相位,这2 个量可由多体多次散射后的等效入射波确定[9]。
1.2 模型仿真及实验验证
通过螺旋桨产生气泡云仿真实际舰船尾流,实验场景如图1 所示。
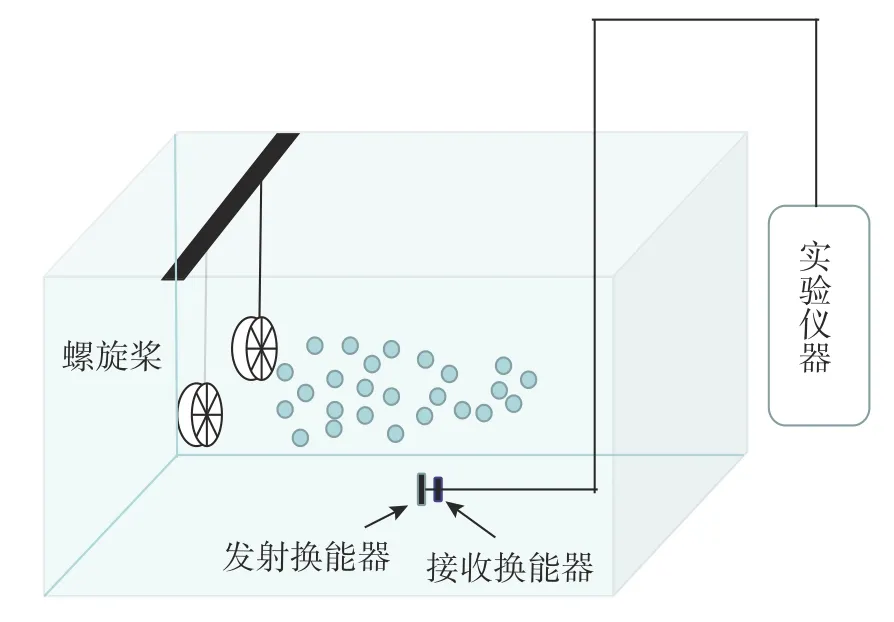
图1 水箱实验场景布置图Fig.1 Layout of water tank experiment scene
发射连续波(continue wave,CW)信号时仿真散射回波和实验散射回波如图2 所示。

图2 仿真和实验散射回波Fig.2 Simulated and experimental scattering echoes
仿真和实验回波信号的统计特性如图3 所示。分析发现2 种信号瞬时值的概率密度均服从高斯分布,慢变包络服从瑞利分布,符合理论[7]预期。
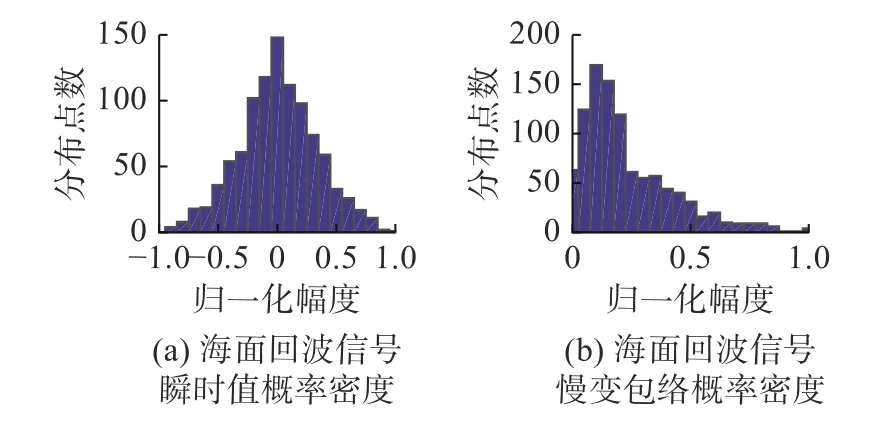
图3 回波信号统计特性Fig.3 Statistical properties of echo signals
仿真和实验回波信号的归一化时频图如图4所示。对比实验和仿真散射回波发现,实验采集散射回波和仿真散射回波信号出现的频段基本一致,实验散射回波信号由于水面起伏和气泡的运动,导致信号的频率分布更大。对比发现,仿真回波信号和实验回波信号的时域特性、统计特性和时频特性较为吻合,说明舰船尾流散射回波模型的可靠性。
1.3 数据集构建
通过舰船尾流散射回波模型构建数据集A,通过水箱实验构建数据集B,数据集的构成如图5所示。
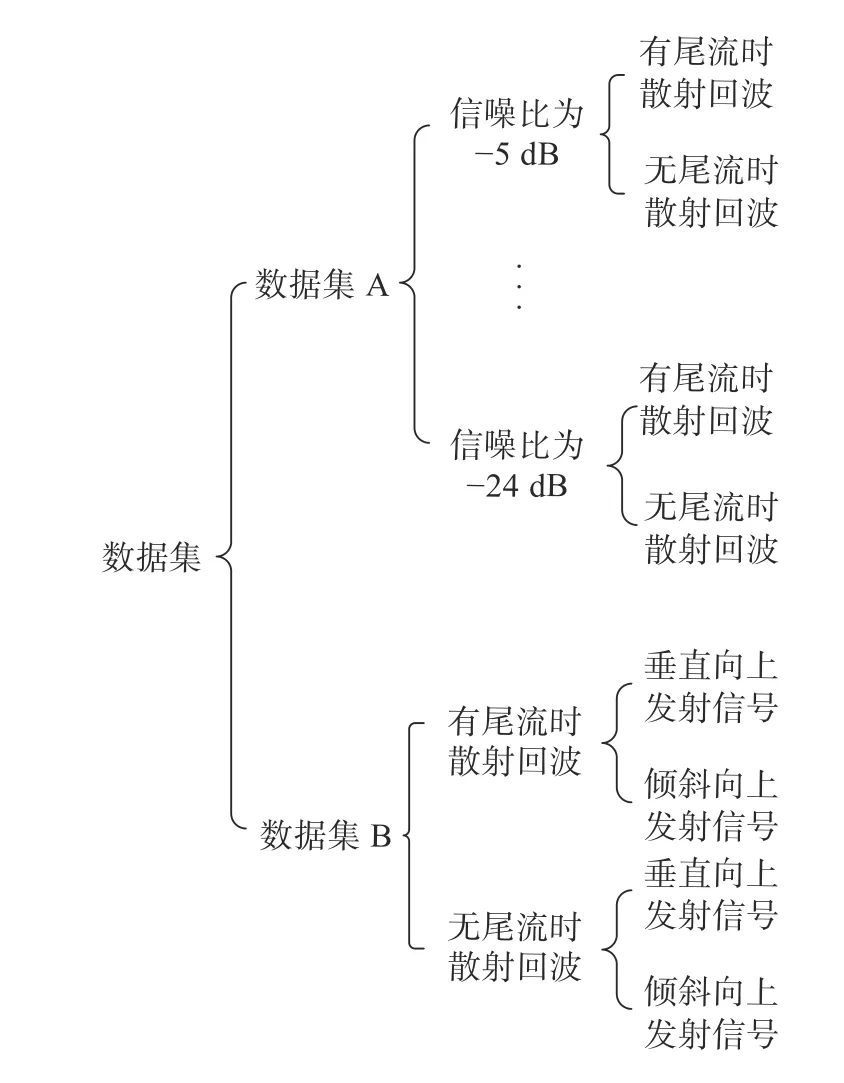
图5 数据集构成Fig.5 Composition of data set
数据集A 包含1 440 段有尾流时散射回波和1 440 段无尾流时散射回波。为了提高仿真数据集A 的泛化性,有/无尾流时散射回波分别包含收发平台距水面不同距离、不同航行速度和不同信号发射角度的散射回波,构成见表1。每一段散射回波包含1 个发射周期的散射回波,包含25 000个采样点。信噪比(signal noise ratio,SNR)是评价信号中含有多少有效信息的重要指标,且

表1 数据集A 构成Table 1 Composition of data set A
式中,Psignal和Pnoise分别表示信号功率和噪声功率。
对数据集A 添加不同SNR 的高斯白噪声,构成一系列不同SNR 的数据集。
数据集B 是通过水箱仿真实验采集得到的数据,包含240 段有尾流时散射回波和240 段无尾流时散射回波。有/无尾流时散射回波分别包含120 段垂直向上发射信号的散射回波和120 段倾斜向上发射信号的散射回波。
2 基于1DCNN 的舰船尾流检测
深度学习方法通过挖掘数据更深层次的特征,得到数据间的内部规律。传统卷积神经网络进行信号处理时需要将信号转化为二维图像,不但降低了效率,而且还需要考虑二维图像因尺度变化等问题对检测性能的影响[10]。目前1DCNN 已在信号检测中取得一定研究成果,包括故障信号检测、管道泄露信号检测和地震信号检测等[11]。有尾流时散射回波和无尾流回波信号在幅度和时序存在较大差异。为提高舰船尾流检测的精度、训练速度和效率,设计了可用于舰船尾流检测的1DCNN,挖掘有/无尾流时散射回波的差异,以提高舰船尾流检测准确率。
2.1 1DCNN 基础结构
1DCNN 的结构示意如图6 所示,包括输入层、隐藏层和输出层。

图6 1DCNN 结构示意图Fig.6 1DCNN structure
输入层为时域信号或频域信号。隐藏层通常包括卷积层、池化层和全连接层3 类基础结构。在卷积层中,卷积核为一维条状,按照特定的方向和步长不断滑动从而遍历各个采样点。池化操作在卷积层提取特征之后,对其进行下采样,从而减少计算量和参数个数等。池化窗口的大小需要与输入信号长度相匹配。全连接层是用来分类的层结构,对提取的特征进行非线性组合以得到输出,在全连接层前,1DCNN 需在深度方向展开。
最后采用监督学习,由输出层输出分类标签。
2.2 1DCNN 结构设计
二维卷积神经网络结构在图像分类任务中较为多样化,但对于一维数据分类任务的模型研究较少。随着计算机性能的提高,在图像处理领域,许多学者开始搭建层数越来越深的网络,以此获得更强的拟合能力,但模型复杂度和计算时间也大幅提高。通过对比分析不同深度的网络识别准确率和网络复杂度,搭建了适合舰船尾流检测的1DCNN 结构。
舰船尾流检测包含2 种回波信号,相比光学图像包含的信息量更少,因此不需要很深的网络,文中研究卷积层层数为4、5 和6 等3 种模型的检测性能,不同卷积层的参数见表2。在最后1 个卷积层之后连接全局最大池化(Global Max Pooling,GMP)层,其他卷积层之后跟着大小为1×3、步长为2 的最大池化层,对特征矩阵进行降维。在GMP 层后依次连接神经元个数为128 和2 的全连接层,在全连接层前均采用Dropout 函数随机失活20%的神经元用来防止过拟合。
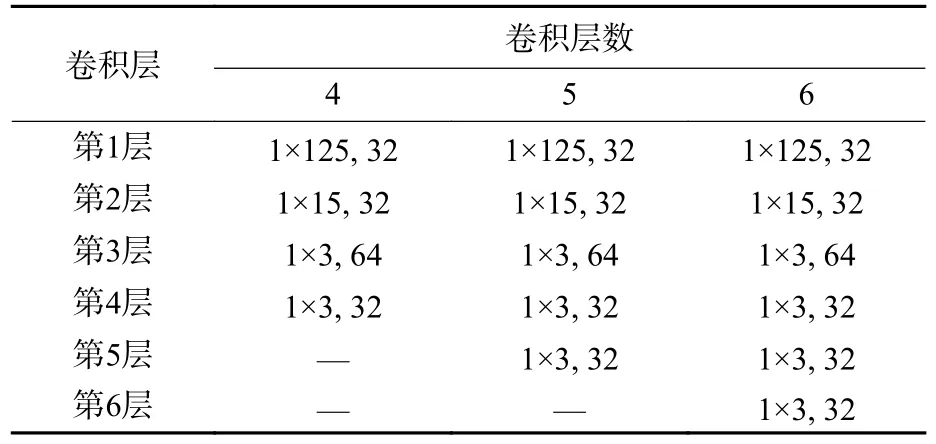
表2 不同卷积层数模型参数表Table 2 Parameters of models with different convolutional layers
使用数据集A 对3 种模型进行实验,并求出检测准确率的平均值和模型参数量,见表3 和表4。
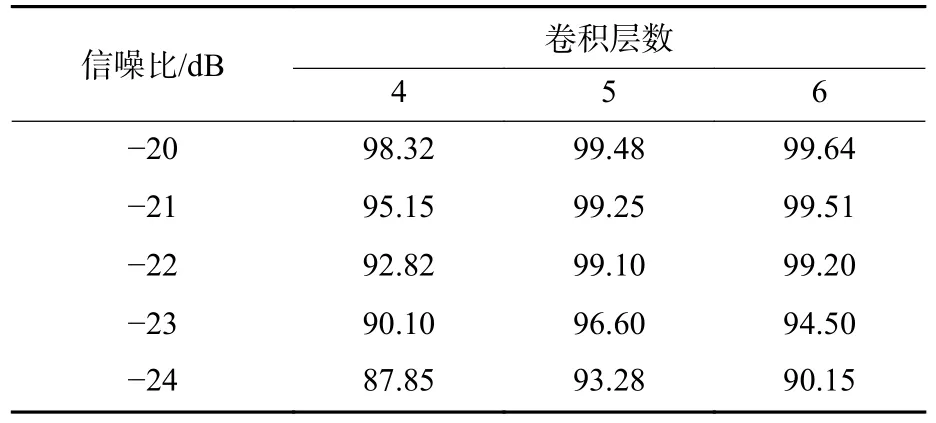
表3 不同卷积层数模型检测准确率Table 3 Model detection accuracy with different convolutional layers 单位:%

表4 不同卷积层数模型参数量Table 4 Model parameter quantity with different convolution layers
通过比较表3 和表4 可知,SNR 为-22~-20 dB时,随着卷积层数的增加,检测准确率逐渐升高,模型参数数量也逐渐增加。SNR 为-23 dB 和-24 dB时,网络层数由4 层增加到5 层,检测准确率增加,但增加至6 层时,检测准确率下降。这是因为当层数为6 层时,网络发生过拟合,导致检测准确率下降。检测概率95%以上,认为可以有效检测,发现4 层卷积层的模型在SNR>-21 dB 时可有效检测,5 层卷积层的模型在SNR>-23 dB 时可有效检测,6 层网卷积层的模型在SNR>-22 dB 时可有效检测。综合考虑检测准确率和参数量,文中选取卷积层数量为5 层。
对于卷积神经网络来说,模型的宽度指的是卷积核的个数。文中综合检测准确率和参数量选取32和64 这2 种常用卷积核数。最终搭建的1DCNN包含5 个卷积层、4 个最大池化层、1 个GMP 层和2 个全连接层,参数见表5。

表5 1DCNN 结构参数表Table 5 Parameters of 1DCNN structure
1DCNN 第1 层是大小为1×125 的卷积核,用来捕获更宏观的特征;第2 层采用大小为1×15 的卷积核;之后均采用大小为1×3 的卷积核。前4个卷积层之后都跟着窗口大小为1×3、步长为2 的最大池化层对特征矩阵进行降维,最后1 层卷积层采用GMP 层代替最大池化层,可减小模型参数和计算复杂度且能防止过拟合。在GMP 层后连接2 层全连接层以提高非线性分类性能。填充(Padding)方式不再采用传统的补零方式,而采用“Valid”填充方式,如图7 所示。

图7 “Valid”填充方式示意图Fig.7 “Valid” filling method
“Valid”填充方式为在卷积核完全覆盖数据起始端开始进行卷积操作,卷积核在按照图示方向移动到数据边界时,若剩余元素个数不足以与卷积核进行卷积操作,则舍弃这些剩余元素。
2.3 1DCNN 训练与测试
1DCNN 是1 种能够处理非线性数据的网络结构算法,训练与测试步骤如下。
1) 获取散射回波信号: 包括有尾流时回波信号和无尾流时回波信号。
2) 预处理: 对回波信号进行高斯滤波处理降噪。假设海洋背景噪声为高斯白噪声,而高斯有限响应冲击滤波器可有效抑制正态分布噪声。
3) 划分数据集: 将预处理后的样本以一定的比例分为训练集和测试集,其中,有尾流时散射回波数据标签为1,无尾流时散射回波数据标签为0。
4) 训练模型: 每次从训练数据库中读取一定批量的样本送入1DCNN,进行1 次迭代计算。经过前向传播得到模型的输出,通过损失函数计算得到本次迭代的误差,然后通过Adam 优化算法对模型权重值进行更新。当迭代次数达到总迭代次数后,模型完成训练。此时,保存模型训练得到的权重值,以便在测试时使用,如图8 所示。
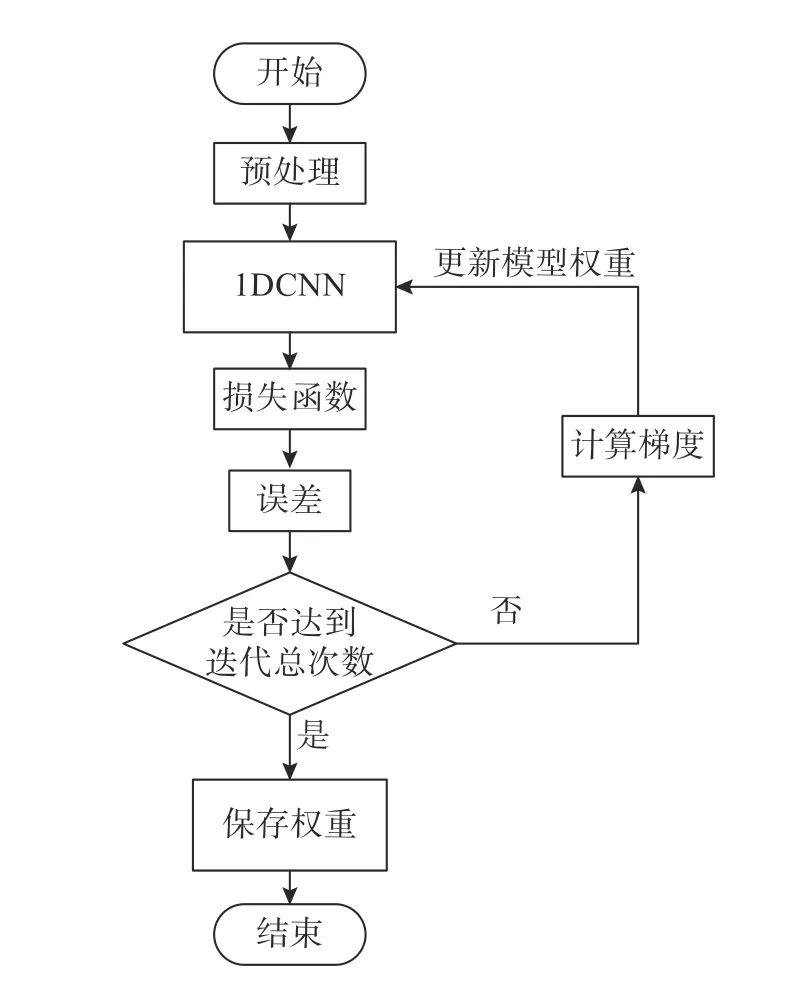
图8 1DCNN 训练流程图Fig.8 Flow chart of 1DCNN training
5) 测试模型: 首先读取之前已训练好的权重文件,加载到1DCNN;然后读取全部测试数据,一次性送入1DCNN 进行前向传播;最后得到1 组预测值,以识别准确率为评价指标计算预测值的准确率,从而得到尾流的检测准确率,如图9 所示。

图9 1DCNN 测试流程图Fig.9 Flow chart of 1DCNN test
3 实验结果及分析
3.1 舰船尾流检测结果
实验采用Python 语言,基于Tensorflow 搭建了1DCNN。为在保证检测性能的基础上选择模型空间复杂度最低、对硬件设备要求最小的模型,故在训练时仅使用CPU。用于训练的计算机配置为Intel(R)Core(TM) i7-6700HQ CPU@2.60GHz 处理器。
首先对数据集A 和B 进行预处理,数据集选取的发射信号为100 kHz 的连续波(continuous wave,CW)信号,所以选取阶数为165 阶、方差为1、均值为0 和中心频率为100 kHz 的高斯带通滤波器,幅频曲线如图10 所示。
然后在预处理后每个SNR 的样本中随机抽取20%作为测试集,其余样本作为训练集输入1DCNN。综合考虑计算机配置与训练效率等因素,确定输入模型的批大小(batch size)为32,迭代代数(epoch)均为20。为方便与其他算法对比,将测试集的准确率均趋于稳定后的平均识别准确率作为网络的最终识别准确率。
利用数据集A 中-10 dB 的数据进行测试,获得的训练集和测试集识别准确率曲线如图11 所示。根据曲线图得出1DCNN 模型在10~20 代趋于收敛,计算测试集平均识别率为99.85%。此外,统计了实验中1DCNN 对2 880 段散射回波预测总时间,计算出网络处理1 段散射回波的平均时间为40.1 ms,说明检测模型具有良好的实时性。

图11 1DCNN 模型识别准确率曲线图Fig.11 Recognition accuracy curves of 1DCNN model
选择单类支持向量机(one-class support vector machine,OCSVM)和BP 神经网络进行对比分析。OCSVM 和BP 神经网络选择Jeong 等[3]提出的2 种固定阈值作为特征输入。3 种算法在数据集A 和B 的检测准确率见表6。
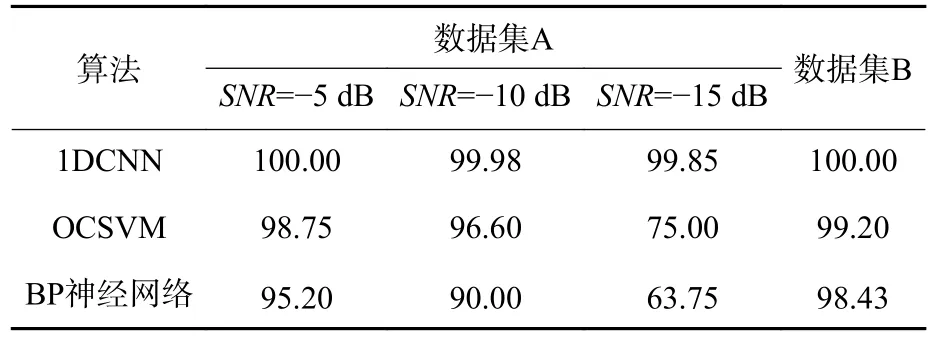
表6 不同算法在数据集A 和B 的检测准确率Table 6 Detection accuracy of different algorithms on data sets A and B 单位:%
由表6 可知,对于数据集A,当SNR 为-10~-5 dB 时,3 种算法的尾流检测准确率较为理想。相对于OCSVM 和BP 神经网络检测准确率,1DCNN进一步提高了检测准确率;当SNR 为-15 dB 时,OCSVM 和BP 神经网络由于提取的特征鲁棒性较差,检测准确率迅速下降,而1DCNN 仍表现优异。因为OCSVM 和BP 神经网络是先人工提取特征再进行分类检测,导致检测性能与提取特征密切相关。数据集B 是水箱实验环境下采集到的数据,SNR 较高,3 种算法都表现优异,算法检测准确率均较为理想。1DCNN 相比OCSVM 和BP 神经网络进一步提高了检测准确率。
3.2 泛化性分析
为验证文中网络的泛化性,分别使用数据集A训练模型→数据集B 测试模型和使用数据集B 训练模型→数据集A 测试模型,结果如表7 所示。
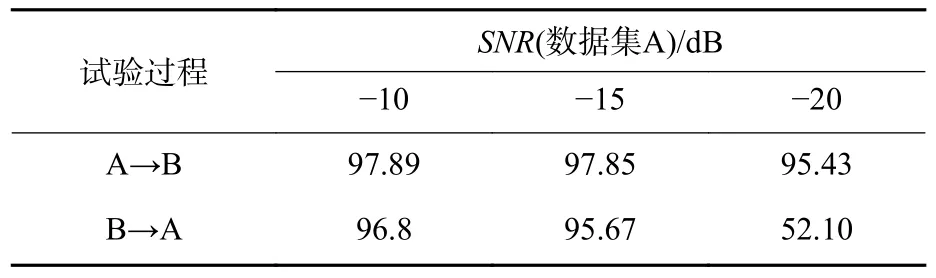
表7 变数据集检测准确率Table 7 Detection accuracy of change dataset单位:%
从表7 可知,当训练集和测试集为不同数据集时,检测准确率出现下降,这是因为数据集之间的差异造成的。使用数据集A 训练模型,数据集B测试模型检测准确率总体高于使用数据集B 训练模型,数据集A 测试模型。这是因为数据A 的SNR总体低于数据集B,数据集B 是水箱环境下采集的数据,SNR 较高,导致训练的模型鲁棒性较差。当数据A 的SNR 较高时,可以实现有效检测。
3.3 消融实验
文中设计的1DCNN 不同与常规卷积神经网络,第1 层卷积层采用尺寸为125 的大卷积核,且在全连接层之前采用GMP 层。为了验证这种结构改进的有效性,将同另外3 种网络结构一起进行消融实验。网络结构1 是常规卷积神经网络,第1 层卷积神经网络采用尺寸为3 的小卷积核,且采用最大池化(max pooling,MP)。网络结构2 中第1 层卷积神经网络采用尺寸为125 的大卷积核且采用MP。网络结构3 中第1 层卷积神经网络采用尺寸为3 的小卷积核且采用GMP。网络结构4 即文中设计的结构。在数据集A 和数据集B 上,对4 种网络结构进行实验,结果见表8。

表8 不同网络模块配置下的检测准确率Table 8 Detection accuracy under different network module configurations
由表8 可见,这4 种网络结构中,对于1DCNN,第1 层采用大卷积核的检测准确率比小卷积核高很多,这是因为大卷积核有更大的感受野,但参数量也随之增加。此外,GMP 相比MP 可以有效提高检测准确率并减少参数量,这是由于GMP 层能够增强特征与目标类别之间的相关性,同时GMP层中没有需要训练的参数,因此可以大幅减少网络的参数和计算量,有效防止过拟合,使得学习到的特征鲁棒性更好。可见文中设计的第1 层卷积层采用大卷积核和GMP 的网络模型可有效提高检测准确率并减小计算量。
4 结束语
为了提高舰船尾流的检测准确率,文中提出一种基于1DCNN 的舰船尾流检测方法。综合考虑网络的检测准确率和计算量搭建了1DCNN,并在舰船声尾流散射模型构建的仿真数据集和水箱实验采集的实验数据集上,与传统算法进行对比。分析可知,1DCNN 提高了尾流检测准确率,且在较低SNR 时也能保持良好的检测效果。从检测时间来看,1DCNN 具有较好的实时性,而且选择一维时域信号直接作为输入,提高了检测效率。仿真结果表明,文中提出的舰船尾流检测算法可满足实际检测精度和检测速度的要求,具有一定的工程应用价值。
