尾流气泡幕中光子传输时间 Monte Carlo 仿真
2024-01-13闫林波张建生
闫林波,张建生
(西安工业大学 基础学院,陕西 西安,710021)
0 引言
在船舶航行过程中,由螺旋桨旋转产生的空化、海面的破碎波浪,以及从吃水线部分卷入的大量空气等因素的作用,在船舶尾部的海水中会形成一条含有大量气泡的气泡幕带,这就是通常所说的尾流。尾流中所含气泡密度和尺度等都会对船舶的各种特性产生影响。近年来,国内外许多学者对船舶尾流的研究有了新的进展。尾流具有声学特性、光学特性、热效应以及电磁学特性等多种特性。其中,光特性相比于其他特性,具有抗干扰能力强、便于检测等优点,利用气泡群光的散射特性可以较为准确地判断尾流的几何形状和密度分布等特征,从而对船舶实施定位、跟踪和监测。
在国外,对尾流光学特性的研究最早始于1955年,Davis[1]通过研究单气泡散射理论,得出了较大气泡的散射特性。此后,Marston 等[2]对气泡光散射特性进行了进一步研究。Akbar 等[3]基于混合Euler-Monte Carlo 方法对悬浮在水池中的上升气泡的散射问题进行了仿真研究。国内对于尾流光学特性的研究起步较晚,但发展迅速。张建生等[4-5]提出了尾流光学特性的数理模型,并用自行设计的水下测试实验系统对气泡幕和真实尾流进行一系列实验研究。曹静等[6]基于Mie 散射理论,考虑光的多次散射,利用Monte Carlo 方法仿真计算了水中气泡群的光散射特性。Xia 等[7]采用Multilayer Monte Carlo(MMC)方法研究了气泡水中散射光的后向散射信号。孙春生等[8]对舰船远程尾流气泡群的前向光散射特性进行了研究。韩彪等[9-10]基于Fournier-Forand 体积散射函数,建立了一种水中激光脉冲后向散射仿真模型。张家利等[11]对尾流气泡的运动速度、尺度变化及数密度变化进行了研究。杨郁等[12]通过偏振光传输特性的Monte Carlo 仿真计算了气泡幕前向散射光的stokes 矢量,并研究了线偏振光及圆偏振光入射时气泡幕前向散射光的偏振特性。孙建鹏等[13]根据Mie 散射理论计算了单个气泡的光学散射效率、散射相函数以及强度分布。陈焱等[14]对激光的前向散射光照度进行了测量,并研究了不同压强和介质对激光前向散射光的影响。宗思光等[15]基于舰船尾流分布特性和气泡目标特性,采用Monte Carlo 仿真方法实现了多尺度、宽数密度以及大厚度舰船尾流气泡群的后向散射回波信号特性仿真。
综上所述,学者们对于尾流气泡幕的前向散射研究还有不足,且对于光子在尾流气泡幕中运动性质的刻画还不够丰富。文中基于Henyey-Greestein 体散射函数[16],建立了一种水中激光脉冲的前向散射模型,将该模型用Monte Carlo 方法对光子在气泡幕中的传输过程进行仿真,得到光子传输时间的概率分布。利用该模型对不同气泡幕厚度、不同气泡尺寸,以及激光与尾流气泡幕的不同距离的前向散射光进行仿真,通过光子运动时间的分布变化来反应尾流的性质,进而为尾流探测提供新的依据。
1 模型建立
为掌握气泡幕的光散射特性,除了考虑气泡幕的尺度、分类和密度之外,周围背景也会对气泡幕的光散射情况产生影响[17]。Monte Carlo 光散射模型利用概率统计以及随机数原理[18],将多次散射的情况考虑在内,对于实际的气泡幕光散射情况更接近。针对激光在水中的传播过程,假设激光由大量光子构成,各散射体与光子之间的相互作用独立。
如图1 所示,设光子在初始时刻的位置为(x0,y0,z0)且沿z轴方向在水中传播,光子在2 个气泡之间自由传播的距离服从统计规律,即
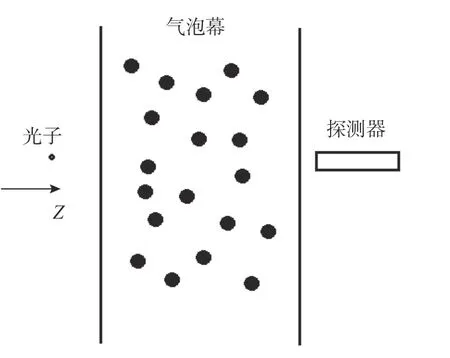
图1 Monte Carlo 仿真模型示意图Fig.1 Monte Carlo simulation model
式中: µt为水体衰减系数;ς为区间[0,1]服从均匀分布的随机数。光子从第n个散射体运动到第n+1 个散射体时,坐标变化为
式中: (xn,yn,zn)和 (xn+1,yn+1,zn+1)分别为光子运动的前后坐标;为光子传播时的方向余弦,散射前后方向余弦变化为
式中: |uz|≤µH,µH为接近1 的正数;φ 和 θ分别为散射发生时的方位角和散射角,φ的表达式为
碰撞后空间散射角方向分布满足Henyey-Greestein 的相函数近似,即
式中: µ=cosθ;g=称为光散射的不对称因子,且0 ≤g≤1,g=0时表示介质对光子的散射是各向同性,g=1时表示前向散射,g的表达式为
式中,an和bn为Mie 散射系数,气泡的散射截面为
由于气泡对光子能量的吸收,光子在传播过程中可能会被“湮灭”。设置光子能量权值为W=1,初始时刻W=1,每次经过散射体后,W=1 的值变化为
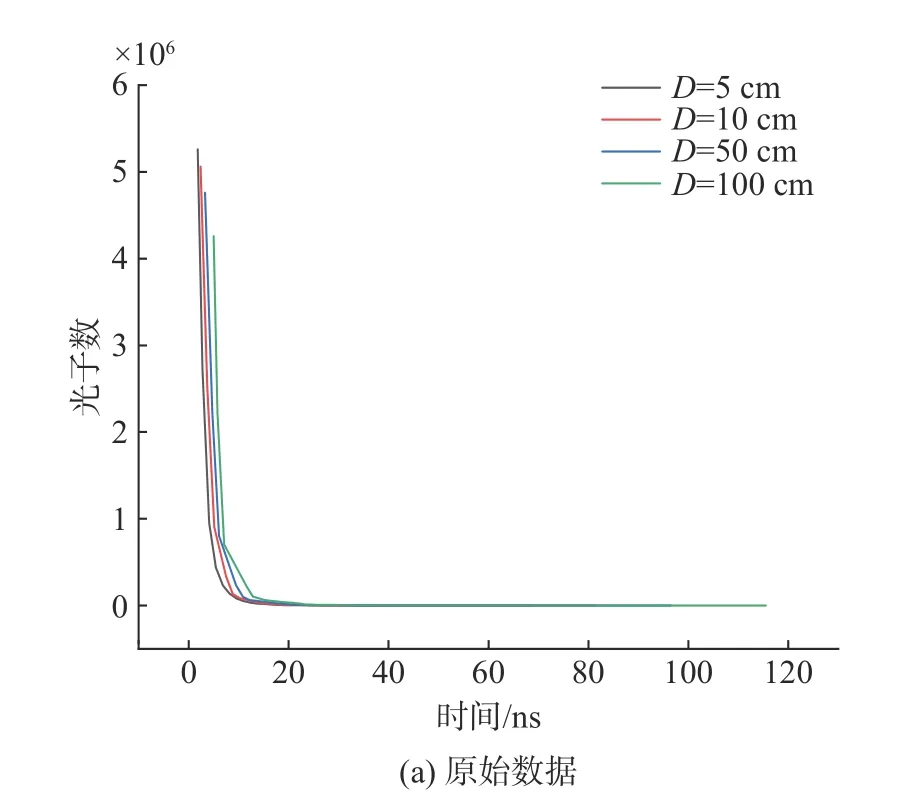
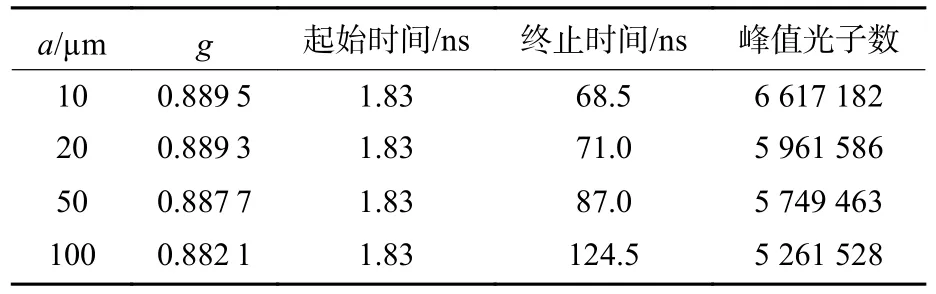
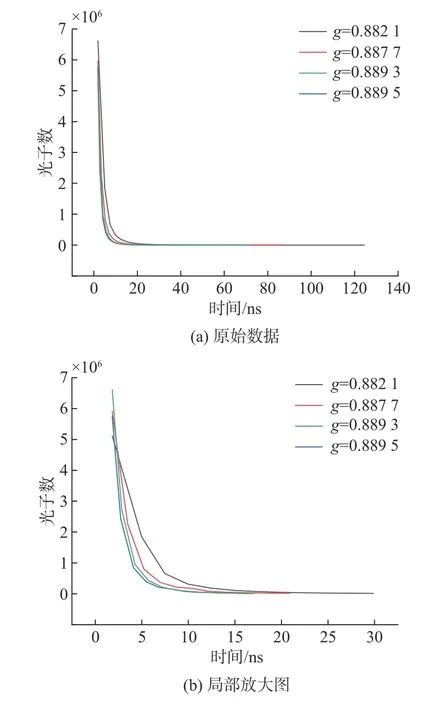
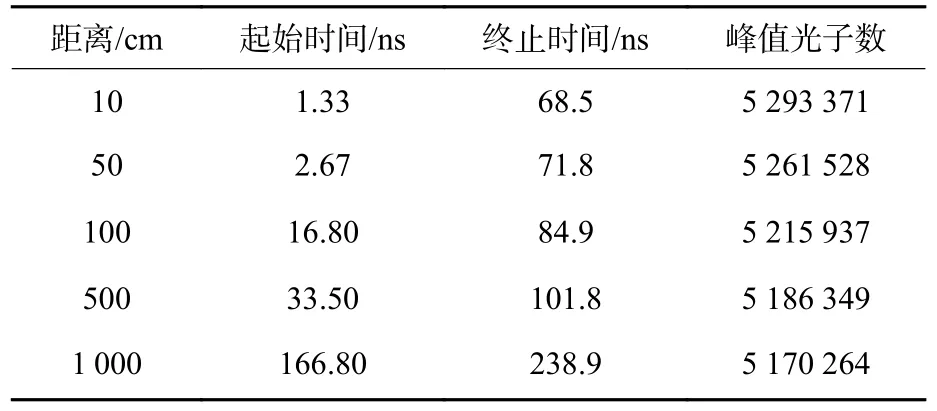
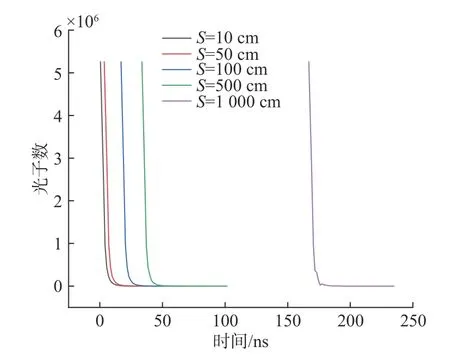
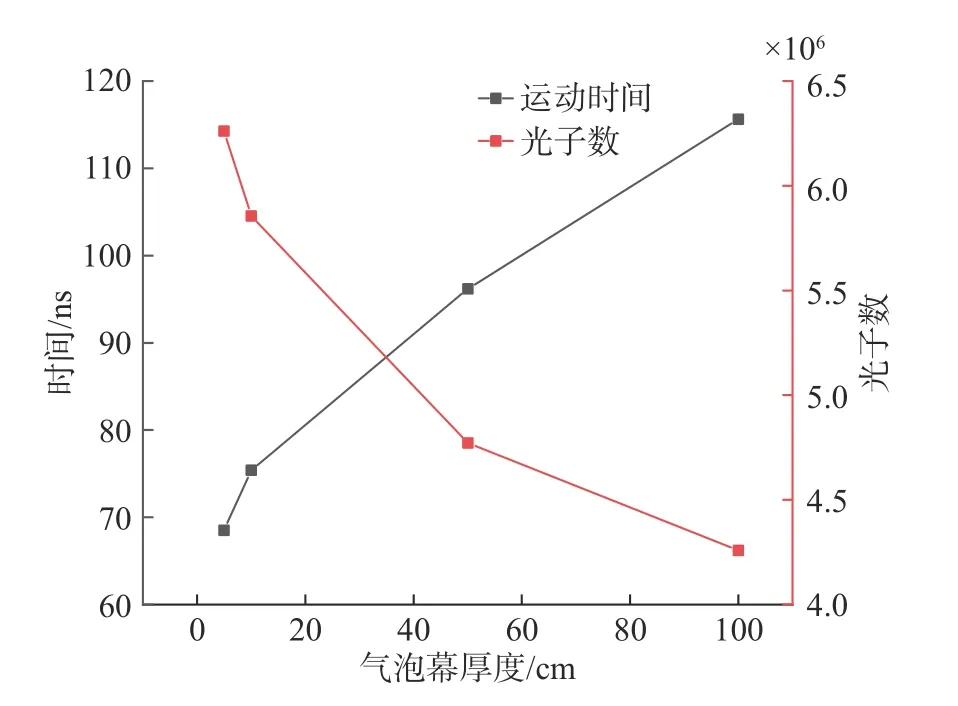
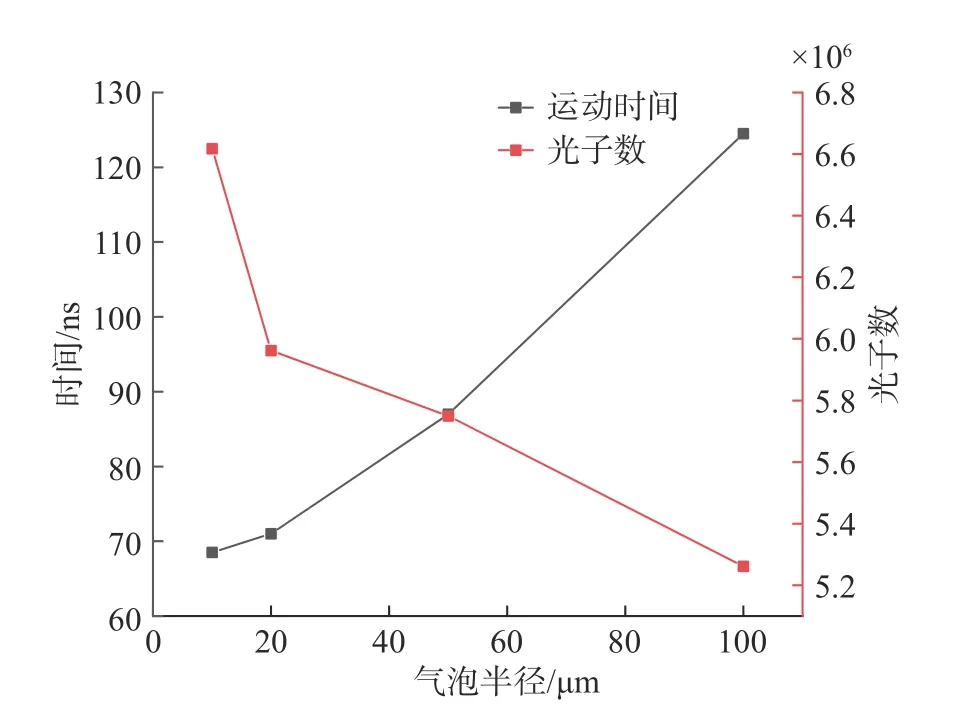
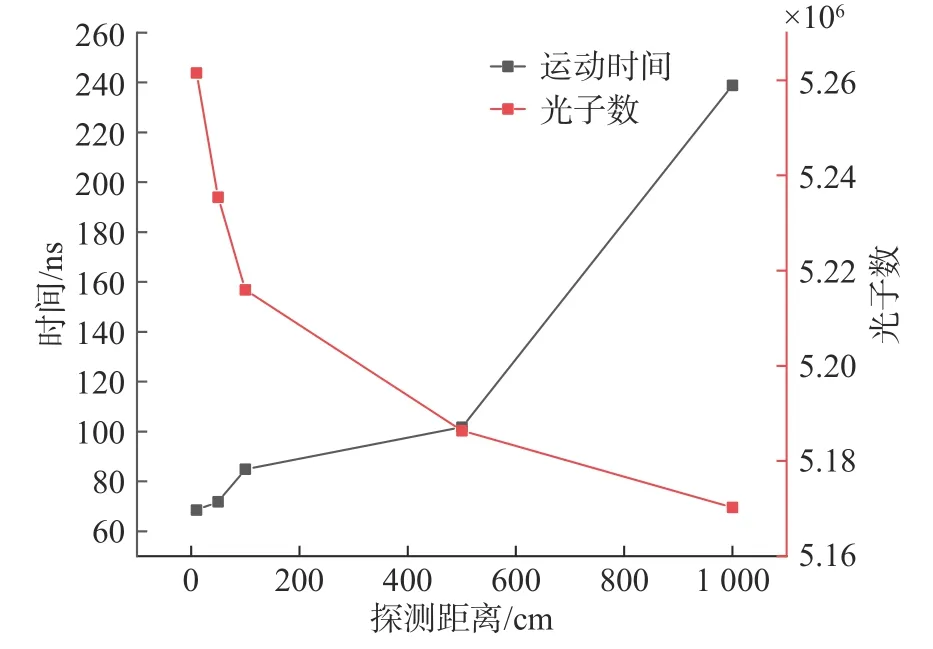
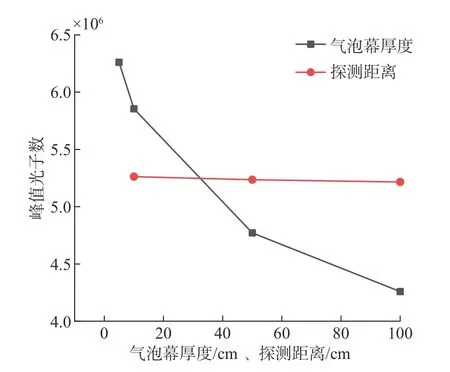
其中,µa为 水体吸收系数。设置探测器阈值为WH,该值由探测器灵敏度决定,当W 式中:nw为纯水的折射率;sT为光子在水中传播的总路程;c为真空光速。 利用以上过程即可得到探测器接收到的所有光子的传播时间 {T},对 {T}进行统计分类,将时间以 τ为间隔将光子传播时间等分为若干个小区间[(L-1)τ,Lτ],其中L=1,2,3,···,统计每个区间的光子数。 利用上节建立的水中脉冲激光传输Monte Carlo 模型,定义气泡幕厚度D为该气泡群中最后1 个和光子发生相互作用的气泡与第1 个和光子发生相互作用的气泡z坐标的差值,即 设置参数气泡幕厚度D分别为5、10、50、100 cm,光源离气泡幕的距离为50 cm,纯水折射率nw=1.33,气泡折射率n=1,得出光子传播的时间分布如图2 所示。统计每个小区间内的光子数,并对其进行拟合,脉冲激光的形状分布可以近似为光子数随时间的分布。图2(a)和(b)分别为不同气泡幕厚度下光子传输时间的原始数据和局部放大图。表1 给出了探测器探测到光子的初始时间和截止时间,结合图2 和表1,从探测器探测到光子的时间分布情况可以看出,随着气泡幕厚度的增加,探测器检测到光子的时间段变长,峰值光子数随着气泡幕厚度的增加逐渐降低,表现为脉冲激光脉宽变宽,强度减弱。 表1 不同气泡幕厚度下探测器探测结果Table 1 Detection results of detectors under different bubble curtain thicknesses 图2 不同气泡幕厚度下光子传输时间分布Fig.2 Distribution of photon transmission time under different bubble curtain thicknesses 气泡尺寸主要影响的是气泡的不对称因子,文献[19]给出了计算气泡不对称因子的数值表达式为 a为气泡半径;nw=1.33。气泡幕宽度设置为5 cm,通过设置不同的a值,得到光子传播时间的统计分布,并对其进行均值拟合,得出前向散射光的脉冲响应。图3(a)和(b)分别给出了不同g值光子数传输时间分布的原始数据和局部放大图。表2 给出了气泡半径a和g的对应关系以及探测器仿真结果,可以看出a与g负相关,仿真结果表明,由于气泡幕厚度相同,开始接收到光子的时间大致相同,随着g值减小(气泡半径增大),探测器接收光子的终止时间变长,表现为脉冲后沿向后移动,峰值光子数随着气泡半径的增大逐渐降低,表现为脉冲激光的峰值强度降低。所以随着气泡半径的增加,脉冲激光在气泡幕中的传输特性整体表现为脉宽展宽,脉冲强度变低。 表2 不同g 值下探测器探测结果Table 2 Detection results of detectors under different g values 图3 不同g 值下光子数传输时间分布Fig.3 Transmission time distribution of photon numbers under different g values 设g=0.882 1,气泡幕厚度设为30 cm,通过改变光源和气泡幕之间的距离来对不同探测距离进行仿真,图4 给出了光源与气泡幕距离S分别为10、50、100、500、1 000 cm 时,光子传播时间的统计分布,对其进行均值拟合,得到前向散射光的脉冲响应。表3 给出了不同探测距离探测器探测结果参数。结果表明,整个脉冲在展宽上没有发生较大变化,只是整体上向后平移。从探测器接收光子峰值数角度来看,峰值光子数随着探测距离的增加而缓慢降低。 表3 不同探测距离探测器探测结果Table 3 Detection results of detectors under different detection distances 图4 不同探测距离光子数传输时间分布Fig.4 Transmission time distribution of photon number under different detection distances 通过对不同气泡幕厚度和气泡尺寸,以及光源和气泡幕的不同距离进行Monte Carlo 仿真,结果分析如下: 1) 气泡幕厚度不同时,气泡幕对光子的散射随着厚度的增加而增大,光子在气泡幕中运动的时间变长,初始时刻接收的光子所用时间最短,这些光子在进入气泡幕后没有与气泡发生相互作用,直接穿出气泡幕,从仿真结果看,随着气泡幕厚度的增加,没有与气泡发生相互作用的光子越来越少,从而导致初始时刻脉冲激光强度降低,脉冲激光表现为脉宽展宽,峰值强度减弱;2) 不同气泡尺寸的仿真结果显示,由于只是改变了气泡的尺寸,所以检测器检测到光子的起始时间是一定的,但由于尺寸较大的气泡在空间上所占位置较大,更容易碰到光子,并与其发生散射,所以在最初时刻,检测器检测到的光子数变少,表现为初始时刻脉冲强度变低,并且大气泡的散射导致光子在气泡幕中的运动时间变长,所以整体也表现为脉宽展宽,峰值强度变低;3) 光源与气泡幕不同距离的仿真结果表明,随着光源与气泡幕的距离变远,光子传输的路程变长,所以检测器接收到光子所用的时间整体变长,表现为脉冲激光在时间轴上整体右移,但由于气泡幕厚度与气泡尺寸固定不变,其脉宽没有发生较大变化。 图5~7 分别为不同气泡幕厚度、气泡半径以及探测距离下光子运动时间和峰值光子数变化趋势。从图中可以看出,3 种情况下光子传输时间变化趋势相同,气泡幕厚度越大,气泡半径越大,探测距离越长的情况下,光子的传输时间越长;3 种情况峰值光子数变化趋势也相同,气泡幕厚度越大,气泡半径越大,探测距离越长,峰值光子数越低。 图5 不同气泡幕厚度光子数传输时间及峰值光子数变化曲线Fig.5 Curves of photon number transmission time and peak photon number with different bubble curtain thicknesses 图6 不同气泡半径光子数传输时间及峰值光子数变化曲线Fig.6 Curves of photon number transmission time and peak photon number with different bubble radii 图7 不同探测距离光子数传输时间及峰值光子数变化曲线Fig.7 Curves of photon number transmission time and peak photon number with different detection distances 通过对比不同气泡幕厚度和探测距离的光子传输时长(见图8),可以得出: 在同等尺寸的气泡幕厚度和探测距离情况下,光子在气泡幕中比在水中的传输时间长;随着气泡幕厚度和探测距离的增加,光子运动时间都呈上升趋势,并且光子在气泡幕中运动时间的上升趋势比在水中的上升趋势更明显。 图8 不同气泡幕厚度和探测距离的光子传输时间对比Fig.8 Comparison of photon transmission time with different bubble curtain thicknesses and detection distances 通过对比不同气泡幕厚度和探测距离的峰值光子数(见图9),可以得出: 由于气泡幕的散射,峰值光子数随气泡幕厚度的增加明显降低;而探测距离的增加只是改变光子在纯水中的运动路程,并没有发生散射,所以峰值光子数随探测距离的增加降低得较为缓慢。由此可知,气泡幕对于光子的衰减效果要远大于纯水。 图9 不同气泡幕厚度和探测距离的峰值光子数对比Fig.9 Comparison of peak photon number with different bubble curtain thicknesses and detection distances 文中基于Henyey-Greestein 函数建立了一种分析激光前散射特征的模型,利用该模型采用Monte Carlo 方法分析了不同气泡幕厚度、气泡尺寸和检测距离的激光脉冲前向散射特性。结果显示,在不同气泡幕厚度、气泡尺寸和探测距离的条件下,光子的传输特性发生了明显的变化,利用该模型可以较好地实现对尾流气泡幕的宽度、气泡尺寸和距离的探测。通过文中的计算,表明Monte Carlo 仿真光子的传输时间分布可以作为探测尾流特性的一个重要依据。应用于真实尾流,该模型可以为探测尾流距离、形状和尺度分布情况提供计算方法,也可为脉冲激光探测尾流气泡幕提供理论依据。下一步工作将是利用真实尾流的实验结果对仿真结果进行验证并进行误差分析,以便寻找到更好的仿真模型。2 不同气泡幕厚度的Monte Carlo 仿真

3 不同气泡尺寸的Monte Carlo 仿真
4 不同探测距离的Monte Carlo 仿真
5 仿真结果分析

6 结束语
