一种基于主动声呐图像多重累积的航迹起始方法
2024-01-13焦君圣
王 凯,焦君圣
(中国计量大学 计量测试工程学院,浙江 杭州,310000)
0 引言
水下运动目标自主检测[1-2]是水声领域研究的热点和难点问题。航迹起始在自主检测中占据重要位置,其目的是在较短扫描时间范围内快速确认航迹,准确的起始航迹能避免多目标跟踪中航迹关联的组合爆炸情况。目前,航迹起始方法[3-5]主要有2 类: 一类是如直观法、逻辑法和修正逻辑法的顺序处理方法;另一类是如Hough 法和Hough变换的批处理方法。主动声呐采样率高,采样周期长,导致声呐图像序列像素点多,基于Hough 变换的一系列算法无法直接应用于主动声呐的目标检测。
检测前跟踪(track before detect,TBD)技术有3 大优点: 对单帧数据无阈值处理,保留所有的目标信息;基于跟踪思想的轨迹搜索,避免了复杂的数据关联;利用多帧数据积累能量进行决策,提高目标的正确检测概率[6]。近年来,一些学者在采用TBD 方法和Hough 变换进行目标检测方面做了大量研究[7-9]。Hadjira 等[10]提出了一种实时霍夫变换(real time Hough transform,RTHT),用于实时自启动处在雷达杂波信号中的轨迹,仅对满足速度和加速度测试的测量值进行变换,大大缩短了处理时间,但无法适用于非均匀杂波情况。滕婷婷[11]使用择大的声图像序列累积方式,利用双门限检测机制结合Hough 变换解决了多输入多输出(multiple input multiple output,MIMO)动目标检测问题,但图像中的目标像素点过多,难以形成航迹,检测结果粗糙。Wang 等[12]通过波束域数据归一化抑制混响,累积多帧数据后进行Hough 变换,实现弱目标检测,但其并未讨论累积后过门限检测问题。李子高等[13]基于水下无人平台通过检测声呐方位历程图,利用修正的Hough 变换-检测前跟踪(Hough transform-track before detect,HT-TBD)方法自主检测水下可探测目标,但其检测输出为一条直线,不能给出航迹头和航迹尾,无法进行后续目标跟踪。
针对上述问题,文中在主动声呐强混响背景下,提出一种基于声呐图像多重累积的水下多目标航迹起始方法。针对主动声呐航迹起始过程中水下目标运动特性,构建强混响背景下多目标运动模型,利用常规空时处理和二维恒定虚警率(constant false alarm rate,CFAR)检测方法生成距离-方位-帧时间三维声呐序列图像,研究择大累积的多帧累积方法和质心聚类的量测点迹提取方法,获取了目标的方位信息和能量信息。为实现多目标航迹起始任务,研究局部峰值检测的Hough 变换方法,得到了多目标初始航迹。通过速度约束条件以及航迹合并,剔除了混响并合并重复航迹。该方法不仅可实现水下运动目标自主检测,更给出了目标在累积的帧时间范围内的出现时刻,因此可以作为主动声呐水下多目标跟踪的航迹起始算法。
1 水下多目标航迹起始模型
主动声呐通过发射某种形式的声信号,并利用水下目标的信号反射回波进行探测。由于回波中包含了目标信息,所以可根据目标回波信号来判断目标的存在,并测量或估计目标的距离、方位等参量。因而,主动声呐逐渐成为水下目标探测的重要手段之一。图1 给出了主动声呐水下多目标运动示意图。
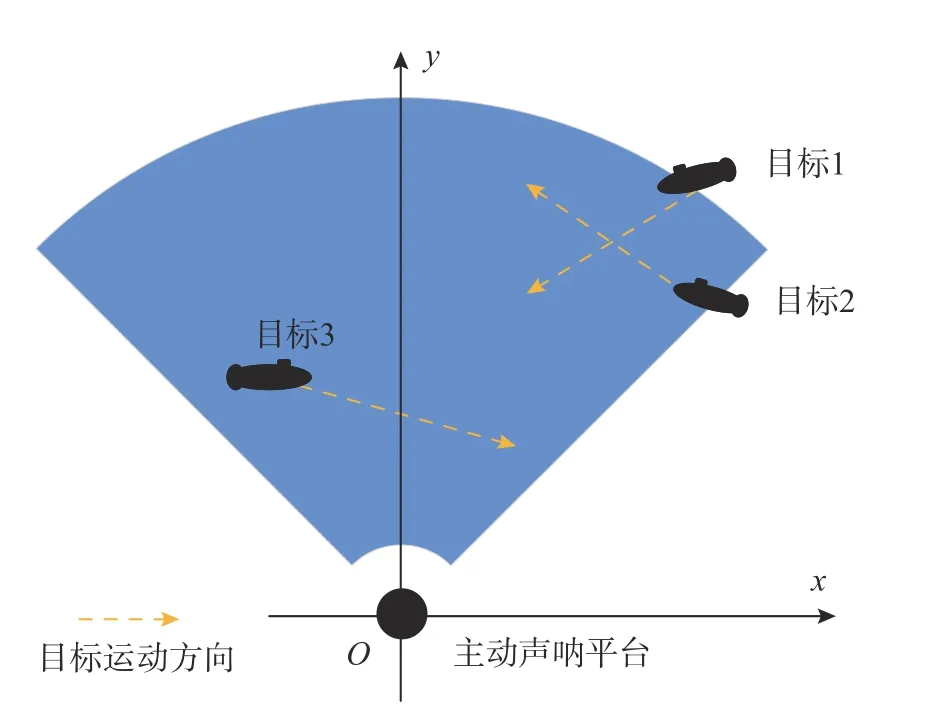
图1 水下多目标航迹起始模型Fig.1 Underwater multi-target track initiation model
在直角坐标系xOy中,假设主动声呐平台位于坐标系原点处,由N个均匀线列阵组成。对声呐回波数据按照距离分段处理,考虑第d个距离分段第k帧目标回波数据为
2 声呐图像多重累积航迹起始算法
基于声呐图像多重累积的水下多目标航迹起始算法流程如图2 所示。算法对阵列采样数据进行预处理,获取各帧声呐图像;累计各帧声呐图像并输出量测点迹;然后通过Hough 变换进行能量累积,并通过速度约束剔除混响。

图2 水下多目标航迹起始算法示意图Fig.2 Underwater multi-target track initiation algorithm
2.1 声呐图像择大累积
声呐图像序列累积不同于雷达中的相干累积。由于声呐设备的刷新率较低,难以在同一位置对目标进行多次成像,因此无法进行相干累积。为降低主动声呐非相干累积带来的信噪比损失,同时获取各目标出现的扫描批次,首先对各扫描批次的声呐阵列数据进行波束成形,然后通过匹配滤波得到目标的空时信息,通过二维CFAR检测器[14]获取多帧声呐图像,即距离-方位-帧时间三维图像f(θ,r,k),对图像中各个像素点进行择大累积,即
同时获取累积帧矩阵a(r,θ),以记录各像素点择大累积数据所在的扫描批次。
文中所述择大信噪比累积的方法将距离-方位-帧时间三维图像序列压缩成距离-方位二维图像,同时记录了各个像素点输出值的所在维度k,即扫描批次。因此,在判断某个目标所在方位的同时,也获取了该目标在累积过程中的扫描批次,这对于航迹起始至关重要。
2.2 基于质心聚类的量测点迹提取
基于TBD 的二维声呐图像像素点多,同一目标在声呐图像中会产生目标聚类[15],因此直接使用Hough 变换将累积图像投影到参数空间进行目标检测是不现实的。文中通过图像分割算法,选取择大累积声呐图像中过信噪比门限的1 个或多个像素点作为生长点,依据一定的生长准则逐步增长连接区域,直至没有可以归并的像素点位置,进而求出连续区域U,并使用U的质心代替该连续区域。
对声呐图像按照距离域均匀分段,每一段设置不同信噪比门限 δSNR,分别对各段声呐图像进行门限检测,将过门限的像素点作为生长点。通过图像分割算法求出连续区域,将满足门限条件的连续区域U作为1 个目标整体,再采用质心法求取该连续区域的质心,用质心代替该区域。
质心计算公式为
利用上述方法可以计算目标方位 (rG,θG),目标能量为e(rG,θG),目标出现的扫描批次为a(rG,θG)。至此,获得了目标的量测信息通过极坐标转换,将目标量测中的方位信息转换到直角坐标系中,得
2.3 距离分段的Hough 变换算法
首先,构建量测数据矩阵,整合第d个距离分段第k帧量测数据,则第d个距离分段数据矩阵为
对第d个分段,选取分辨率nd,构建映射矩阵
其次,将量测数据经过Hough 变换映射到参数空间的曲线。根据Hough 映射公式ρ=xcos(θ)+ysin(θ),d分段数据矩阵B(d)映射后的参数空间矩阵为
再次,构建参数空间并进行参数空间离散化。对d分段对应的参数空间矩阵H(d),将参数空间离散分割成个小格,构成离散单元,每个离散单元的中心点为
对分段的各量测数据重复上述过程即可完成对能量累积矩阵和数据记录矩阵的累积。基于主动声呐多目标航迹起始的难点在于难以确定初始航迹量测点集合中各量测目标的扫描批次,文中在对参数空间进行能量累积的同时,建立相同维度的数据记录矩阵,当离散单元对量测点进行能量累积的同时,数据记录基阵同时记录该量测点的方位、所在距离分段及扫描批次等信息,便于在Hough 逆变换后进行混响剔除。
2.4 Hough 参数空间局部峰值检测
当声呐图像序列中目标呈直线分布时,在Hough 参数空间中会出现峰值,且围绕峰值的离散单元分布类似于蝴蝶状,称之为蝶形分布[16],如图3所示。Hough 变换的能量累积矩阵是一个三维曲面,首先在其中确定极大值点作为局部峰值备选点,然后向备选点的四联通区域的方向拓展,直到达到能量累积值的波谷点,记录能量衰减值,定义该备选点的峰突强度为四联通方向上能量衰减的最小值。

图3 具有噪声分布的声呐图像参数空间累积图(局部)Fig.3 Spatial accumulation map of sonar image parameters with noise distribution(local)
设置阈值δ,若峰突强度大于δ,则认为该离散单元符合检测条件,对该离散单元进行Hough 逆变换,得到初始航迹。
在主动声呐多目标航迹检测过程中,如果声呐图像中过门限的背景混响和运动目标航迹处在同一直线上,初始航迹会存在混响。一般情况下,背景混响点迹和目标点迹不符合目标运动约束条件,因此,可以通过对初始航迹进行速度约束,剔除不满足速度约束条件的点迹。
3 仿真验证
3.1 参数设置
考虑水下目标低航速运动特点,较短时间内航深、航速和航向基本保持不变,可以假设目标在二维平面内作匀速直线运动。主动声呐探测区域范围[0.75 km,11.25 km]、[60◦,120◦],海水声速平均值为1 500 m/s,目标运动速度均为12 m/s。均匀线列阵声呐位置为 (0 km,0 km),阵元数目为96,输出波束数目为384,阵元间距为搜索最高频率对应波长的1/2。多目标运动状态及信噪比情况如表1 所示。

表1 目标运动参数Table 1 Motion parameters of targets
对线列阵接收信号进行处理,连续采样次数10 次,采样周期15 s。将声呐序列图像按照距离平均分成3 段分别进行Hough 变换,参数空间网格数按照分段分别取400、300 和200,局部峰值检测门限为局部峰值的3/4。
3.2 方法可行性验证
TBD 算法普遍采用将多帧声呐图像求和平均的累积方式对目标航迹展开研究,由于背景噪声的影响,累积次数过多会造成信噪比大幅降低,过少则不足以体现连续性。在文中提出的择大累积的基础上,累积次数较多情况下信号信噪比降低不明显。择大累积次数不宜过少,过少不足以体现航迹连续性,但也不宜过多,过多会大大增加计算成本,一般10~30 次为宜。
以仿真线列阵声呐回波信号为基础对文中算法的检测性能进行仿真研究。选用10 次声呐图像进行择大累积以提高检测效率。10 次择大累积后的声呐序列图像如图4 所示。累积后量测数据点分布及质心聚类后量测数据点分布分别如图5 和图6 所示,可以看出,用质心代替目标量测聚类后,可以大幅降低数据点数目。

图4 10 次择大累积后声呐序列图像Fig.4 Sonar sequence image after maximum accumulation of 10 times

图5 10 次择大累积后量测数据点分布Fig.5 Distribution of measurement data points after maximum accumulation of 10 times

图6 质心聚类后量测数据点分布Fig.6 Distribution of measurement data points after centroid clustering
根据2.3 和2.4 节距离分段Hough 检测和局部峰值检测方法,对质心聚类后的量测数据点进行Hough 变换。在强混响背景下,使用质心方法代替目标聚类容易在角度域产生偏差,距离越近,混响导致的偏差越大。文中通过调整不同距离分段Hough 参数空间的离散网格数目加以平衡,不同距离分段的量测数据进行Hough 变换由近到远设置参数空间离散网格数目分别为200、300、400,得到参数空间累积图和数据记录矩阵。参数空间累计图和局部峰值检测结果分别如图7 和图8 所示。对单目标的航迹起始,可在参数空间累积图中直接取累积值的最大值作为初始航迹输出。当对多目标进行航迹起始时,参数空间会形成多个局部峰值,此时使用局部峰值检测可以有效获得初始航迹。

图7 参数空间累积图Fig.7 Parameter space accumulation
数据记录矩阵中存储了各参数空间离散单元中累积的量测点迹的扫描批次、方位和能量信息,通过数据记录矩阵对局部峰值检测结果进行Hough逆变换获取初始航迹。再利用航迹起始滑窗法的M/N 逻辑原理剔除不合理航迹,将初始航迹完全相同的特征点进行合并。为了有效剔除初始航迹中的混响,可对初始航迹进行速度约束,检测优化处理后的输出航迹如图9 所示。
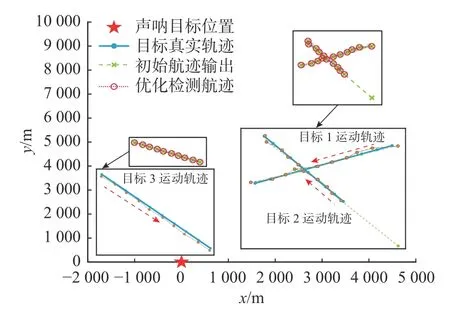
图9 目标航迹输出图像Fig.9 Output image of target track
由图9 可知,文中算法航迹起始输出和目标真实航迹具有一定偏差,这是受常规空时处理中的方位角误差和质心聚类的影响,初始航迹输出和目标真实航迹无法完全重合,但是对航迹起始结果没有影响。
3.3 不同条件下的性能分析
为了进一步验证算法的可行性,仿真时主要考虑到主动声呐的测距误差和测角误差对检测性能的影响。文中对不同的误差各进行500 次Monte Carlo 仿真试验,以平均值作为最终的检测性能指标,图10 给出了检测处理结果。

图10 不同条件下的检测性能Fig.10 Detection performance under different conditions
由图10 可知,主动声呐的测距误差和测角误差等技术指标直接决定了算法的检测性能。其中,测角误差是影响算法性能最主要的因素,当其在2°范围内逐渐增加时,文中算法的检测概率将显著下降。这与算法波束数目的设置和采取何种波束成形算法直接相关。
4 结束语
航迹起始在水下运动目标自主检测过程中起着举足轻重的作用,针对主动声呐回波信号空时处理后数据量庞大的问题,提出了一种基于主动声呐图像多重累积的航迹起始算法。该方法具有如下优势: 1) 在对距离-方位-帧时间三维声呐图像序列进行降维累积的同时,记录了目标的扫描批次,尽可能保留了目标的完整信息;2) 使用质心聚类的方法提取目标点迹,降低了目标像素点数目,大幅提高航迹起始速度;3) 局部峰值检测的方法实现了多目标初始航迹输出,避免了门限检测的主观性。仿真结果表明,该算法有效降低了航迹起始过程中声呐图像的数据量,在强混响背景下仍能以高检测概率实现水下多目标自主检测。文中方法以常规空时处理后的声呐图像为基础展开研究,因此目标量测信息估计精度存在较大偏差,后续可对目标方向位置精度加以改进。
