相控阵测控技术(五):相控阵测控系统的附加误差分析法*
2023-12-25刘嘉兴
刘嘉兴
(中国西南电子技术研究所,成都 610036)
0 引 言
无线电测控系统具有跟踪测轨、遥控、遥测功能,它采用连续波测量体制,相比于其他飞行器测轨设备,其特点是具有髙的测速精度和测距精度[1-2],而这两个指标也是研制测控系统的重要指标,因此对测速、测距的精度分析是测控系统设计的重要内容。连续波测控系统采用载波多普勒频移测速获得了极高的测速精度,采用频率较高的测距信号(甚至载波)的相位测量获得了很高的测距精度,但是测控系统相控阵化后,由于控制相位进行角扫描和角跟踪的同时引起了合成载波相位的变化,从而使测速、测距精度变差,这种角误差对测速/测距误差的耦合效应笔者已在文献[3]中作了介绍。这是相控阵测控技术中的一个特殊的新问题,相应的精度分析也需要一种新的方法,这也是当前工程技术人员急需解决的理论问题 。这种方法既要能继承已往的精度分析的成果,又要针对它的特殊问题探讨一种准确且简单实用、物理概念清晰、便于工程应用的新分析方法。有鉴于此,本文提出附加误差法和基准阵元法。
1 机扫天线测控系统相控阵化后的附加误差
从我国相控阵测控系统的发展过程来看,它是由机扫天线测控系统相控阵化后形成的一种新系统,相控阵化以后,它较原机扫天线系统增加了一部分误差,本文将其命名为附加误差,即图1(b)和图1(a)两种天线对应系统的测速、测距误差之差。

(a)机扫阵列天线
本文提出用基准阵元法分析测速、测距附加误差。

在图1(a)中加入移相器即构成图1(b)所示的相控阵天线。图中基准阵元通道不加移相器,或加移相器但不参加电控,它是与机扫天线基准阵通道完全相同的一个机械天线,当阵中各阵元通道移相器置于0°时,该相控阵也与机扫天线完全相同。
下面先讨论入射电波垂直于阵面情况。这时各阵元通道输出载波同相相加且合成载波与基准阵元载波同相,在阐述图1(a)时已经指出,这种情况下,基准阵元相位代表了机扫阵列天线阵的相位,因此对输出载波的相位而言,可用基准阵元等效代替图1(a)所示的机扫天线(天线阵的增益除外),而机扫天线测控系统的测速/测距误差分析在理论上和工程应用上都很成熟,已有成熟的公式计算[4],这时算出的误差定义为基本误差。
以下再讨论入射波偏离阵面垂线θ时的情况。这时按电波空间相移理论值,以基准阵元相位为基准对阵中各阵元配相,理论上可实现各阵元输出同相相加并与基准阵元同相。实际上由于各种误差因素的影响,使得各阵元输出信号不能同相相加,使合成载波的相位偏离了基准阵元的相位,亦即偏离了机扫天线阵输出载波的相位,也就是产生了载波附加相移。由于测控系统是利用合成载波测速、测距的,从而产生了测速、测距附加误差,这个附加误差是相控阵测控系统需要研究的特殊误差。

2 阵元方向图引入的基准阵元法方法误差
对于机扫天线,它由伺服系统驱动天线对准目标,因此目标运动时,信号是在基准阵元相位方向图和幅度方向图的一个固定角度上传输的。这时阵元的相移和增益是固定的,但对于相控阵天线,则是天线阵面不动,目标飞掠过基准阵元。由于阵中基准阵元的方向图是不平坦的,故在不同的方向角θ上,基准阵元的相移是不一样的。作为例子,图2给出了单环缝隙阵中阵内阵元相位方向图随θ变化的情况[5]。
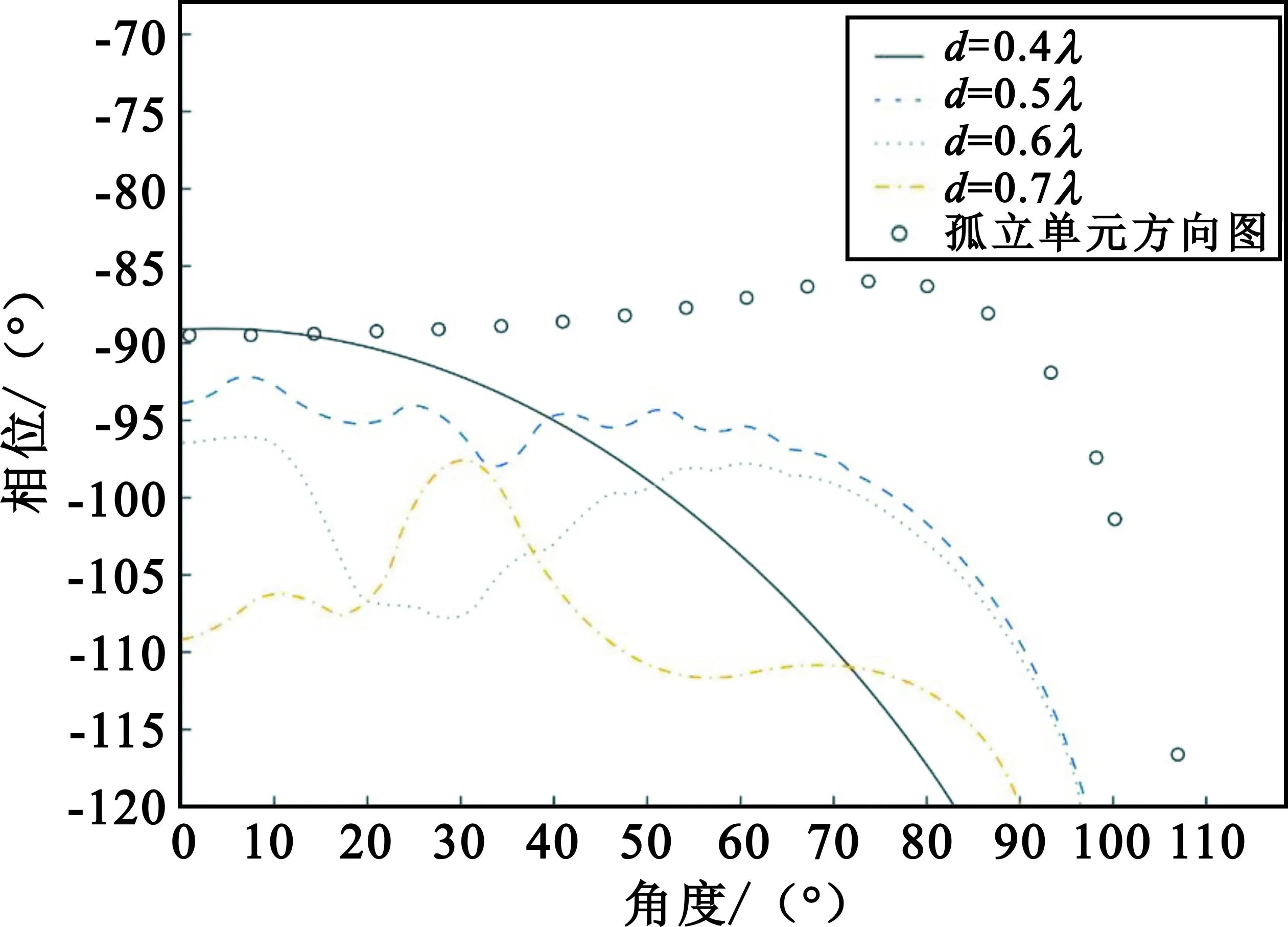
图2 缝隙阵元在阵中的相位方向图
从图2可见,由于相控阵的互耦、边缘效应、多径反射等的影响,阵元在阵内的相位方向随θ而变,且与阵元间距有关。图2是缝隙阵元情况,改变阵元形式会有不同的变化。
由于前述的附加误差分析是以基准阵元在阵面法线方向上的相移作基准来分析合成载波附加相移的,因此当信号偏离阵面法线方向而使基准阵元相移发生变化时,合成载波的相移也会随之变化,就会引起测距/测速附加误差,因此要将它作为一个另加的附加误差项。它的分析和计算,笔者将在下一篇论文中介绍。
3 T/R组件相移引入的基准阵元法方法误差
以上分析了图1(b)所示天线阵引入的测速、测距误差,它还没有包括有源相控阵的T/R组件。当阵元后面联接有T/R电路时,是在T/R输出实现信号合成,如图3所示。

图3 带T/R组件的相控阵天线
从图3可见,T/R组件的相移也会使合成载波的相移发生变化,它包括两个方面:
1) 基准阵元通道T/R组件的相移:由于它是各阵元通道载波合成的基准,所以会引起合成载波的同步移相,引起距离附加误差。它可以通过距离标校来扣除,但基准阵元通道的慢漂移会引起距离漂移误差。
2) 各阵元通道T/R组件相移的不一致性:它引起合成载波相位的变化,使之与基准载波的相位不一致,产生测距附加误差[6]。它同样可用标校扣除,但其慢漂移也会产生距离慢漂移误差。
由于T/R组件的相移是慢漂移的,其微分数值会很小,所以引起的测速附加误差也会很小。
需要指出的是,对于图1所示的两种阵列天线,合成载波的相位与其基准阵元近似同相,因此基准阵元的相位中心可以作为测距的参考点。但是对于图3所示的有源相控阵天线,它是一个由阵元天线与有源T/R电路组合的系统,是电磁场与电路的结合,是在T/R组件输出端实现同相合成(相当于聚焦),物理上它不存在电磁场的相位中心,如果仍沿用相位中心的概念来研究这个问题,就很难与实际系统一致。实际上,在研究测距误差时,可以把相位中心漂移,归结到总的测距误差漂移中去研究并用工程中的距离标校去扣除,而不必去单独测量相位中心。这时测距的基准点是载波信号的相位,在它之前引起附加距离静态误差可用距离标校来扣除。
4 相控阵测控系统总的测距、测速误差
4.1 测距总误差
工程中求总误差的常用方法是,对随机误差和系统误差中的不相关部分用平方和开方计算,对系统误差中的相关部分用代数和计算。本系统中对测距基本误差ΔR0和相控阵附加误差中的互不相关部分,它们的总测距误差
(1)
式中:ΔRΣ为相控阵测控系统的总测距误差,其中恒值分量可以用标校去除;ΔR0为基本测距误差,其中热噪音引起的误差应按最大天线增益时的合成信噪比ρp计算;ΔRp为相控阵引入的附加测距误差。
相控阵引入的测距附加误差包括相时延和群时延两种,相时延是载波在无色散介质中的时延(如空气),群时延是调制在载波上的测距信号在有色散介质中的时延(如带通滤波器)。相控阵中合成载波的附加相移等效为相时延,它引起的测距误差与载波在空气中传播的时延等效,可用下式计算:
(2)
式中:φp为相控阵引入到合成载波的附加相移;ω0为载波工作频率;c为光速;τp为相控阵引入到合成载波的附加相时延(如果测距采用了高精度的载波相位测量,也可将它包含到载波测相的误差中去;对于调制信号测距,则要分析在多通道滤波器合成后的群时延,具体可参见文献[5])。
4.2 测速总误差
(3)

(4)
5 结束语
本文介绍的相控阵中测速、测距附加误差分析方法继承了几十年来机扫天线测控系统精度分析的已有成果,聚焦于分析测控系统相控化的特殊问题,物理概念较为清晰。这种分析方法对于相控阵测控工程研制具有较大的实用意义。笔者采用这种方法分析了相控阵化后由角度误差对测速、测距误差耦合效应等引起的多项附加误差,但由于篇幅所限,分析结果及计算公式将在下一篇系列论文中介绍。