一种基于大规模MIMO系统的三维空间指纹定位方法*
2023-12-25贺晨琳王霄峻
贺晨琳,王霄峻,2,汪 磊,2
(1.东南大学 信息科学与工程学院,南京 211189;2.紫金山实验室,南京 211111)
0 引 言
近年来,自动驾驶、精确定位与跟踪以及地图导航等新兴领域备受学术界和工业界的关注,很大程度上依赖于移动互联网技术提供的基于位置信息的服务[1]。随着全球导航卫星系统的发展,在室外条件下的定位技术已逐步趋于成熟,可以提供较为精准的定位服务。然而,在建筑物分布密集的城市地区和较为复杂的室内环境下,卫星信号大幅度衰减且极易产生多径传播效应与非视距传播,定位效果将急剧恶化[2]。此外,基于无线网络的定位技术也被广泛采用,常见的移动终端定位方法可以分为两类[3]。基于几何的定位方法依赖于移动终端到基站的无线信号的信息,常利用接收信号强度(Received Signal Strength,RSS)[4]、到达时间(Time of Arrival,TOA)[5]、到达时间差(Time Difference of Arrival,TDOA)[6]等,然而其定位精度受非视距传播的影响较大[7]。相比之下,基于指纹定位的方法不会受到非视距环境中多径效应的影响,反而可以对其加以充分利用,因此即使在散射环境复杂的环境中依然能够取得良好的定位效果[8]。
大规模多输入多输出(Multiple-Input Multiple-Output,MIMO)正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)系统能够大幅提升无线通信系统的容量、速率和可靠性。大规模天线阵列和更大的带宽使得基站可以实现更高的角度域和时延域分辨率,有利于实现高精度定位[9]。因此,指纹定位方法在大规模MIMO-OFDM系统中可利用多径信息构建位置指纹信息图谱,提升定位精度。
常被用作指纹信息的参数主要分为两大类。第一类是RSS指纹,常被用于移动热点(Wireless Fidelity,WiFi)网络[10]和无线传感器网络[11]中,但受快衰落波动和多径的影响较大。第二类是多径特征,包括信道状态信息(Channel State Information,CSI)[12-13]、到达角(Angle of Arrival,AOA)[14]、功率时延谱(Power Delay Profile,PDP)[15]以及它们的组合[16-17]等。多径指纹可以从多径传播路径中提取更为丰富的细节,只需少量的基站就足以保证定位精度。指纹定位关键技术包括指纹矩阵提取、指纹相似度准则、匹配算法、压缩算法和聚类算法等。文献[18]提出了一种适用于大规模MIMO系统的角度延迟信道功率矩阵(Angel Delay Channel Power Matrix,ADCPM),结合所提出的指纹压缩方法和两阶段指纹聚类算法,最终以75%的可靠性提供2 m定位精度,以95%的可靠性提供3 m精度。文献[19]在此基础上提出了频率响应信道功率矩阵(Frequency Response Channel Power Matrix,FRCPM)和冲击响应信道功率矩阵(Impulse Response Channel Power Matrix,IRCPM),进一步地提升了定位速度,2 m定位精度可靠性提升至80%。文献[20]提出了一种5G超密集网络下的室内压缩重构指纹定位算法,在信噪比为10 dB时定位误差最小可达0.200 8 m。
现有的大规模MIMO系统指纹定位研究往往存在指纹数据量较大、存储与处理困难、耗时较长等问题,此外传统定位系统能够实现二维平面的准确定位,但在高度上的误差较大,因此本文将指纹定位的研究从二维空间延申至三维空间,以满足更为多样化的实际场景下的定位需求。首先,提出一种新的指纹矩阵;其次,引入新的相似度准则并改进了加权K近邻(Weighted K-Nearest Neighbor,WKNN)匹配算法;最后,对新指纹进行压缩得到3种压缩指纹,减小指纹数据量,加快指纹处理速度,并引入中心到达角(Central Angle of Arrival,CAOA)聚类算法提升定位效果,以得到三维空间下误差最小、速度最快的最佳定位方案。
1 指纹定位系统模型
基于指纹定位方法的核心思想是利用接收到的指纹信息和已经搭建好的指纹数据库进行匹配,建立指纹和位置的对应关系,进而完成对目标物的定位。定位过程主要分为两阶段:离线阶段构建指纹数据库;在线阶段完成接收信息和指纹库的匹配工作,过程如图1所示。
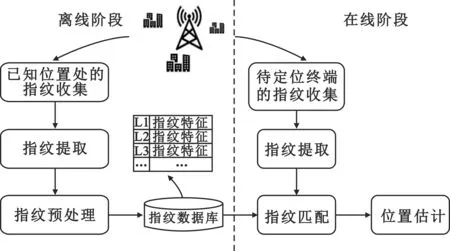
图1 指纹定位方法流程
本文的研究全部基于5G单站环境下大规模MIMO-OFDM系统模型[16],选取分层式均匀分布模型,如图2所示。考虑到移动终端(手机等)受机身尺寸限制多采用单天线配置,因此简单又不失其一般性,假设基站侧配置由N×M根天线组成的均匀平面阵列(Uniform Planar Array,UPA),单天线移动终端与散射体随机分布于待定位区域内,并假设基站已经通过上行信道估计获取CSI。

图2 指纹定位系统三维模型
图2中,N和M分别是x轴和y轴上的天线阵元数,相邻天线阵元间的距离为d,UPA可以同时获取方位角和俯仰角的信息。
假设有K个信号入射到UPA上,那么第l个阵元获得的信号如公式(1)所示:
(1)
式中:si(t)为入射信号;K为待定位的用户数;xl(t)为接收信号;τli为延迟,
(2)
式中:θi为方位角;φi为俯仰角;c为光速;xl和yl分别为第l个阵元在x轴和y轴上对应的坐标值。
将公式(2)表示为矩阵形式,如公式(3)所示:

(3)
2 指纹定位关键技术改进
2.1 信道模型
图2中任一移动终端到基站的无线信道详细模型如图3所示,为方便理解,可将UPA阵列抽象为M个均匀线性阵列(Uniform Linear Array,ULA),每个ULA上配置Nt根天线(即第1节中的N)。

图3 任一移动终端到基站的无线信道模型
假设移动终端发出的无线信号沿着P条不同的散射路径传播到基站,则第k个用户在路径p上的信道冲激响应(Channel Impulse Response,CIR)qp,k可表示为
(4)
式中:ap,k~CN(0,δp,k)是第p条路径对应的复信道增益;dp,k是发射端到第一个接收天线的距离;λc是载波波长;φp,k∈(0,π)是第p条路径对应的到达角(Angle of Arrival,AOA);e(φp,k)是阵列响应向量,
e(φp,k)=
(5)
由于不同路径的TOA不同,第k个用户的CIR可以表示为各路径上的qp,k之和,如公式(6)所示:
(6)
式中:τp,k=dp,k/c是到达时间,c表示光速;CIR指纹矩阵可以表示为Qk,是大小为Nt×Nq的矩阵,Nq为信道冲激响应的长度。
根据采样间隔Ts对信道输出进行采样,OFDM符号间隔表示为Tc=NcTs,其中Nc是OFDM符号数;循环前缀间隔表示为Tg=NgTs,Ng是循环前缀数,Tg满足τp,k∈[0,Tg);各个子载波带宽表示为f=1/NcTs,第l个子载波则是fl=lf,子载波总数Nl=Nc。
信道频率响应(Channel Frequency Response,CFR)指纹可由CIR指纹通过傅里叶变换得到,即针对第l个子载波,CFR是不同时延下各个路径的CIR之和,如公式(7)所示:

(7)

因此,CFR矩阵Hk由各个子载波的hk,l组成,为Nt×Nl的复数矩阵,如公式(8)所示:
Hk=[hk,0,hk,1,…,hk,Nl-1] 。
(8)
2.2 ADCFP指纹矩阵的提取
对于基于位置指纹信息的无线定位,需要从CSI中提取宽平稳的信道特征。2.1节所述信道模型中每条传输路径对应的信道特征满足无线定位需求,该特征包含每条路径的能量、AOA和TOA。
首先对CFR指纹矩阵Hk将其从频率域变换到角度域,得到角度-时延信道频率响应(Angle Delay Channel Frequency Response,ADCFR)矩阵Bk,是大小为Nt×Nl的复数矩阵,如公式(9)所示:
Bk=VHHk∈Nt×Nl。
(9)
式中:V∈Nt×Nt是相移矩阵;VH是V的共轭矩阵,
(10)
由于Bk为复数,在进行定位距离计算时较为复杂,因此将ADCFR指纹做哈达玛内积(Hadamard product),得到角度-时延信道频率功率(Angle Delay Channel Frequency Power,ADCFP)矩阵Ck,如公式(11)所示:
Ck≜Nt×Nl。
(11)
式中:⊙为Hadamard内积。
通过Hadamard内积变换,ADCFP指纹相比于ADCFR指纹,元素个数不变,但ADCFR指纹是复数矩阵,ADCFP是大小为Nt×Nl的实数矩阵。因此,ADCFP指纹相对于ADCFR指纹在在线匹配阶段可以有更快的处理速度,减小了指纹库的存储压力,同时还有利于进行指纹压缩、聚类等处理。
类比于ADCFP指纹,将CFR指纹替换为CIR指纹即可得到角度-时延信道冲激功率(Angle Delay Channel Impulse Power,ADCIP)矩阵Ek,如公式(12)和(13)所示:
Dk=VHQk∈Nt×Nq,
(12)

(13)
2.3 指纹相似度准则
本节引入适用于ADCFP指纹的新的相似度准则——卡方距离。该距离通常用于衡量两个数据集之间的相似度或差异,适用于离散数据,相较于欧氏距离等度量方法,对异常值具有一定的鲁棒性,在分类问题中被广泛应用[13]。因此使用卡方距离可以很好地反应指纹之间的相似度关系,提高在线阶段的定位精度,具体如公式(14)所示:
(14)
式中:Fi,Fj为i点和j点的指纹矩阵;Dischi(Fi,Fj)表示两点间指纹的卡方距离。
从式(14)可以看出,两个指纹之间距离值越小,表示它们相似程度越高。
2.4 次方WKNN匹配算法
本节基于加权K近邻算法提出次方WKNN算法,调整加权系数中距离dk为次方形式,如公式(15)所示:
(15)

相比于WKNN算法,该算法随着距离dk的增加,权重wk将迅速减小,这意味着与目标指纹相似度较低的指纹将具有更小的权重,而与目标指纹相似度较高的指纹将具有更大的权重。权重的下降速度更快,因此局部邻居的影响变得更显著。
如何选择合适的n值是运用该算法的关键。首先,n值大于1保证了该算法可以增加距离较近指纹的权重,符合算法的性能需求。另外,n的取值也未必越大越好,当n值过大时,距离较近的指纹权值太大几乎可以直接影响定位结果,那么效果相当于K近邻算法的K值取1,也会造成较大的定位误差。
2.5 基于ADCFP的按行按列压缩存储方法
在离线训练阶段,为了减少指纹库的存储及搜索压力,加快在线阶段的匹配速度,本节将在保证定位精度尽量不受影响的情况下,对指纹矩阵的压缩方法进行深入研究。所谓的指纹压缩就是去除指纹矩阵里的冗余量,通过删除矩阵中的部分元素,降低矩阵的维度和规模。
本节提出按行按列压缩的存储方法,并将该方法应用于ADCFP的压缩指纹提取,充分利用两个维度的信息,将大小为Nt×Nl的指纹矩阵转换为简单的一维向量,得到3种压缩指纹。
首先将ADCFP指纹按行进行压缩,将得到的压缩指纹命名为水平信道频率功率(Horizontal Channel Frequency Power,HCFP),即将ADCFP指纹矩阵每一行的元素求和,得到的值作为HCFP每一行的元素,具体如公式(16)所示:
(16)

之后将ADCFP指纹按列进行压缩,将得到的压缩指纹命名为垂直信道频率功率(Vertical Channel Frequency Power,VCFP),具体如公式(17)所示:
(17)

最后将VCFP指纹拼接在HCFP指纹之后,充分利用两个维度的信息,得到的压缩指纹命名为水平垂直信道频率指纹(Horizontal and Vertical Channel Frequency Fingerprint,HVCFF),具体如公式(18)所示:
(18)

从3个压缩指纹的压缩率可以看出,由于Nt和Nl的取值均较大,因此该方法可以得到很好的压缩效果,大大节省指纹库的存储空间;同时,该压缩方法得到的压缩指纹不需要像三元表法等在匹配阶段进行矩阵复原,可以直接用于在线阶段的指纹定位,因此可以有效提升在线阶段的定位速度。
2.6 基于ADCFP的中心到达角聚类算法
对于指纹库规模较大的情况,将待定位点和指纹库中的指纹逐个比较会消耗大量的时间。聚类算法的原理是将指纹库中的指纹根据距离或相似度关系分为若干个小类,在进行指纹匹配时,首先判断待定位点属于哪一个聚类,之后只需要和该类指纹库中的数据进行比对即可,从而极大地减少指纹比对的次数,有效提升定位速度。
根据ADCFP指纹的信道功率在角度域上呈现较为集中的特点,本文引入CAOA聚类算法,充分利用其角度谱的特点。该算法的基本原理是:首先划分若干个CAOA的区间范围,之后计算出指纹库中各个指纹的CAOA,并根据其CAOA的大小划分到指定的区间,即某一个或者多个聚类中。在线定位阶段,确定待定位点CAOA所属的聚类,并与该类中的指纹进行比对完成指纹定位。由于同一个指纹可能存在于多个聚类中,所以该方法为模糊聚类。
首先需要定义CAOA的求解方法,以ADCFP为例,如公式(19)所示:
(19)
式中:Fi是ADCFP指纹;αi是该指纹对应的CAOA,αi的取值范围是1~Nt,且只能为整数。由于在散射环境下会存在角度扩散,因此每一个聚类应该是一个角度范围,[αi-Δα,αi+Δα],Δα是最大的角度偏移量。
CAOA聚类方法最多可以分为Nt个聚类,且由于该算法是模糊聚类,因此相比于K均值聚类[3],在线阶段指纹比对的次数会增多,定位精确度会大大提升。
3 仿真与分析
3.1 仿真参数设置
仿真一个典型的蜂窝无线传输环境,考虑配置均匀面阵的基站位于一个无线蜂窝小区中心(0 m,0 m,0 m)处,待定位区域是其中的一个子区域,其中随机均匀分布着密度为0.02/m2的众多散射体,使得待定位用户的指纹信息可以沿着40条子路径传送到接收端。
为体现大规模MIMO特性和室内环境(如大型商超、体育馆、高铁站等)定位需求[21],天线个数取值为128根,网格边长取值为3 m。实验过程中,在待定位区域中随机生成1 000个待定位的测试点。待定位区域的参数设置具体如表1所示。
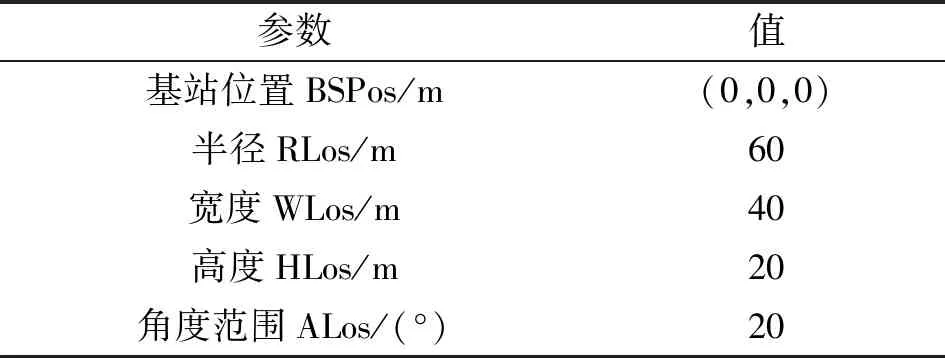
表1 定位区域参数设置
仿真中的具体系统模型参数配置采用5G NR[22]中的标准,并在表2中给出。

表2 系统模型参数设置
3.2 ADCFP指纹矩阵的定位性能仿真
为了更全面地评估本文所提出的指纹矩阵的性能,将其与当前文献中的先进指纹矩阵进行比较。针对ADCFP指纹以ADCIP、IRCPM[19]、FRCPM[19]和ADCPM[18]4种指纹为参照在相同散射环境下进行定位性能的仿真,指纹相似度准则选取曼哈顿距离,匹配算法选取WKNN算法,指纹矩阵未经过压缩处理,指纹库采取CAOA聚类算法。不同指纹矩阵的定位性能比较结果如表3所示,其中可靠性对应于2 m精度,定位误差的累积分布函数如图4所示。

表3 不同指纹矩阵的定位性能比较

图4 定位误差的累积分布函数
从仿真结果可以看出,平均定位误差从小到大的顺序为ADCFP、FRCPM、IRCPM、ADCIP和ADCPM,其中ADCFP指纹的定位精度最高,仅1.068 6 m,是网格边长的35.62%。此外,使用ADCFP指纹定位,89.2%的测试点定位误差均在2 m之内;虽然FRCPM指纹定位可靠性与ADCFP指纹相差较小,但是其定位时长为158.23 s,约为ADCFP的1.5倍。ADCIP指纹定位时长最短,但其余性能均劣于ADCFP。综合可见,ADCFP具有更高的定位精度与更短的定位时长。
3.3 卡方距离的性能验证
针对经典的WKNN算法中度量相似距离多采用简单的闵可夫斯基(Minkowski)距离(包括欧氏距离和曼哈顿距离等),将新提出的卡方距离以欧氏距离和曼哈顿距离为参照,在相同散射环境下进行定位性能的仿真,匹配算法选取WKNN算法,指纹矩阵未经过压缩处理,指纹库采取CAOA聚类算法。由于ADCPM、ADCIP以及IRCPM指纹矩阵存在稀疏性,即矩阵中存在大量零值,在计算其卡方距离时会出现分母为零的情况,无法正确反映指纹间的相似程度,因此本小节仅基于ADCFP和FRCPM两种指纹矩阵进行对比讨论。基于不同相似度准则的定位性能比较结果如表4所示,其中,曼哈顿距离、欧氏距离、卡方距离对应的数值均为平均定位误差,可靠性对应于采用卡方距离时达到2 m精度。ADCFP基于不同相似度准则的定位误差累积分布函数如图5所示,FRCPM基于不同相似度准则的定位误差累积分布函数如图6所示。

表4 不同相似度准则的定位性能比较
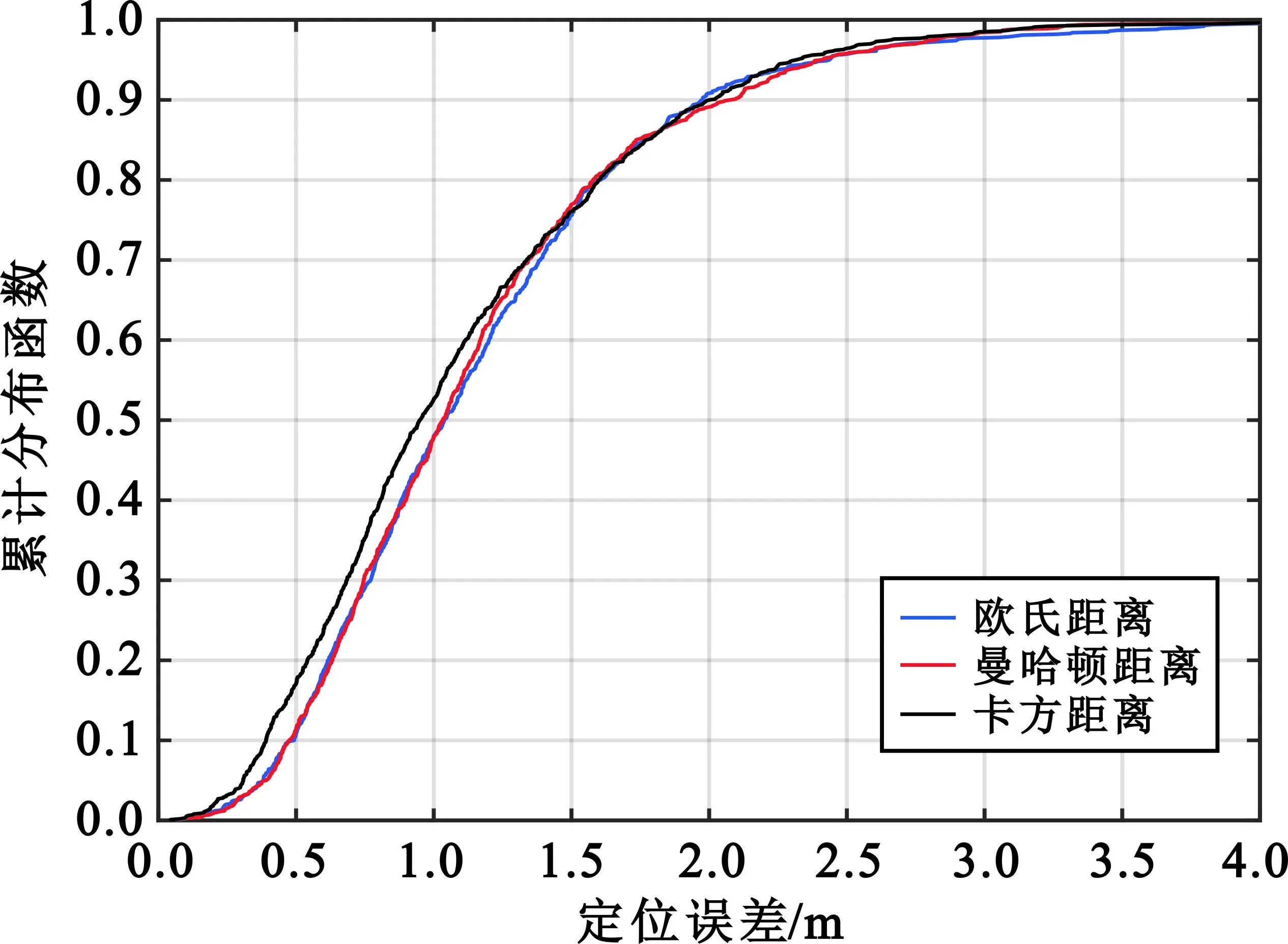
图5 ADCFP基于不同相似度准则的定位误差累积分布函数

图6 FRCPM基于不同相似度准则的定位误差累积分布函数
从仿真结果可以看出,对于ADCFP和FRCPM指纹,定位误差从小到大的顺序均为卡方距离、曼哈顿距离和欧氏距离,说明三维空间下使用卡方距离作为相似度准则可以有效提升定位精度。
此外,无论使用哪种相似度准则,ADCFP的平均定位误差均小于FRCPM,且均是使用卡方距离时定位误差最小。对于ADCFP指纹,卡方距离的平均定位误差为1.008 4 m,是网格边长的33.61%,相较于曼哈顿距离的平均定位误差降低了5.63%。虽然定位时长较使用曼哈顿距离稍有增加,但仍在可接受范围。在可靠性方面,ADCFP指纹可达到90.0%,FRCPM指纹可达到89.7%,较3.2节使用曼哈顿距离可靠性均有所提高。
3.4 次方WKNN匹配算法的性能
本小节针对改进的次方WKNN匹配算法进行定位精度的仿真研究,主要目标是探讨次方值的变化与平均定位误差之间的关系,从而找出最适合ADCFP指纹矩阵的次方值。
为避免研究结果受到特例情况影响,仍选取FRCPM作为参照指纹。指纹相似度准则选取卡方距离,指纹矩阵未经过压缩处理,指纹库采取CAOA聚类算法。选取的匹配算法分别为WKNN算法和4种次方WKNN算法,K值取4。
两种指纹矩阵在不同次方WKNN算法下平均定位误差折线对比如图7所示,可以看出,无论次方WKNN算法的次方值取何值,ADCFP矩阵的定位精度均优于FRCPM指纹。同时在计算平均定位误差时为方便运算,次方值分别选取了1,3/2,2,5/2,3,7/2,4共7种取值。次方值必须大于1才能保证WKNN算法满足距离较近的点权重大、距离较小的点权重小的定位需求,而随着次方值的增大,可以明显看出两种指纹的平均定位误差变化趋势均是先减小后增大的。这是由于当次方值过大时,权重的下降速度将变得很快,距离较近的指纹权重过大,对指纹定位结果的影响是决定性的,从而忽略了距离较远指纹的影响,因此定位误差会逐渐增大。

图7 两种指纹矩阵在不同次方WKNN算法下平均定位误差折线对比
当次方值大于等于3时,与经典的WKNN算法相比,所提方法在定位精度上表现出明显的劣势,因此后续不做讨论。ADCFP指纹在不同次方WKNN算法下定位误差的累积分布函数如图8所示,FRCPM指纹在不同次方WKNN算法下定位误差的累积分布函数如图9所示。

图8 ADCFP在不同次方WKNN算法下定位误差的累积分布函数

图9 FRCPM在不同次方WKNN算法下定位误差的累积分布函数
两种指纹均在使用3/2WKNN算法时平均定位误差达到最小,其中ADCFP指纹的平均定位误差为0.943 0 m,是网格边长的31.43%;FRCPM指纹的平均定位误差为0.969 1 m,是网格边长的32.30%。在使用WKNN算法时,ADCFP指纹的平均定位误差为0.986 9 m,是网格边长的32.90%;FRCPM指纹的平均定位误差为1.017 7 m,是网格边长的33.92%。由此可以得出,三维空间下ADCFP指纹的最佳匹配算法为3/2WKNN算法,较传统WKNN算法的平均定位误差降低了4.45%。
3.5 基于HVCFF指纹的聚类算法仿真
本小节针对硬聚类算法中典型代表K均值聚类算法和引入的CAOA聚类算法进行定位性能的仿真研究。基于原始ADCFP指纹和压缩后的HVCFF指纹,在相同散射环境下分别从在线匹配阶段的定位速度和定位精度两个角度对无聚类、CAOA聚类以及K均值聚类算法的效果进行分析。其中,指纹相似度准则选取卡方距离,匹配算法选取3/2WKNN算法(K值取4),计算目标区域中1 000个待定位点的总定位时长。ADCFP和HVCFF在不同聚类算法下的总定位时长柱状对比如图10所示,3种聚类情况下的平均定位误差柱状对比如图11所示。

图10 ADCFP和HVCFF在不同聚类算法下的总定位时长柱状对比(保留两位小数)

图11 ADCFP和HVCFF在不同聚类算法下的平均定位误差柱状对比(保留两位小数)
从图10中可以看出,无论是ADCFP还是HVCFF指纹,相比于无聚类的情况,CAOA聚类算法和K均值聚类算法的总定位时长都有所缩短,说明这两种算法均能有效提升在线阶段的定位速度。其中,CAOA聚类算法的总定位时长最短,对于ADCFP指纹,其定位总时长为140.70 s,是无聚类情况下的50.57%;对于HVCFF指纹,其定位总时长为2.070 1 s,是无聚类情况下的58.22%。
从图11中可以看出,两种指纹矩阵3种聚类情况下的平均定位误差从小到大的顺序均为无聚类、CAOA聚类和K均值聚类。而无聚类和CAOA聚类的情况下,定位误差相差不大,均在1 m左右,其中,HVCFF指纹在CAOA聚类下的平均定位误差为1.063 4 m,是网格边长的35.45%;而K均值聚类的平均定位误差明显大于未聚类的情况,HVCFF指纹在K均值聚类下的平均定位误差为1.690 1 m,是无聚类情况下误差的1.66倍。
综合定位速度以及定位精度仿真可以看出,基于HVCFF指纹的CAOA聚类算法在定位速度上提升为未聚类情况下的1.72倍,而定位精度仅下降4.14%;基于ADCFP指纹的CAOA聚类算法在平均定位误差上较K均值聚类算法降低了44.05%。由此可以得出结论,三维空间下指纹定位最优的聚类算法为CAOA聚类算法,在提升定位速度的同时能尽可能地保证定位精度。
4 结束语
本文提出了一种5G大规模MIMO背景下三维室内空间移动终端指纹定位方案,旨在解决现有指纹定位技术存在的指纹数据量过大、三维空间定位适应性不足等问题,对指纹定位关键技术进行改进。实验证明,三维空间下结合卡方距离、3/2WKNN算法与CAOA聚类算法,基于ADCFP指纹的指纹定位精度可达0.938 6 m,实现了平均定位误差的最小化;ADCFP指纹矩阵2 m定位精度可靠性可达89.2%,平均定位误差与总定位时长相较于传统算法均有明显提升。
本文的研究停留在静态的环境中,下一步将研究动态环境中的定位情况,进一步提高定位性能。