基于灵敏度分析的可调静叶调节机构运动精度优化
2023-11-27曹传军胡淑慧张苗苗
徐 峰,曹传军,胡淑慧,张苗苗
(中国航发商用航空发动机有限责任公司,上海 200241)
0 引言
可调静叶主要用于高负荷多级轴流压气机中,通过调节静子叶片角度,使转子叶片处于满意的攻角下工作,从而避免喘振[1-2],拓宽压气机中低转速下的稳定工作范围,这对航空发动机正常工作和飞行器的飞行安全至关重要[3]。一般情况下,多级静子叶片采用一套联调机构进行统一调节,使各级叶片按照设计规律偏转,从而提高机构的可靠性[4]和减小系统质量。
当前对于静叶调节机构运动学设计和角度调节偏差方面的研究,主要有几何评估和基于虚拟样机技术优化2种方式。钱笃元[5]将调节机构运动作为平面问题给出了运动方程;贺飞等[6]采用齐次坐标变换将机构运动学模型拓展到3 维空间,并将其应用于角度调节偏差的优化;Riesland[7]、杨伟等[8-9]的研究验证了虚拟样机技术在调节机构设计和优化阶段的有效性;张晓宁等[10]的研究表明了基于虚拟样机技术的优化较物理实验具有较强的经济优势;梁爽等[11]采用试验设计方法对3 级联调机构的角度调节偏差进行了优化。以上研究在调节机构的方案设计阶段,采用参数化分析方法可快速有效地进行设计参数的选取与优化,使机构的运动学仿真结果满足设计要求;但上述研究均采用逐级分解、单级优化的串行优化方法,未能对机构设计参数进行整体优化,且优化后的角度偏差约为0.4°~0.6°。孙凯等[12]针对某扭力杆式调节机构对参数进行了全面梳理,但仍为分级优化,且优化结果为0.7°,可见当运动学模型中考虑较多设计参数时,串行优化的精度明显降低;于嘉鹏等[13]解析推导出2 级叶片转动关系方程,对2 级角度匹配问题进行优化,但仅对曲柄长度和定位角度进行了分析;唐佑远[14]综合考虑了各级设计参数,提出正-逆运动学相结合的机构全局尺度优化设计方法,有效规避了串行优化方法的不足,但未对设计参数进行全面梳理,且无法明晰各参数对角度调节偏差的影响程度。
为此,本文以发动机5 级联调式可调静叶(Variable Stator Vane,VSV)调节机构为研究对象,全面梳理其可能影响角度调节精度的特征参数,提出一种基于局部灵敏度分析参数降维预处理的运动学优化方法。
1 机构构型与运动学建模
1.1 运动原理与几何建模
VSV调节机构主要由作动筒、活塞杆、曲柄连杆、曲柄、连杆、联动环、摇臂、静子叶片等组成。由于机构各级组成部件相同,因此只以单级为例介绍其运动原理,如图1 所示。由于曲柄连杆的存在使各级曲柄在活塞杆驱动下保持同步转动,曲柄带动连杆进而使联动环绕机匣轴线旋转,静子叶片与摇臂固连,二者被联动环带动旋转,旋转轴为机匣和静子内环轴孔连线。
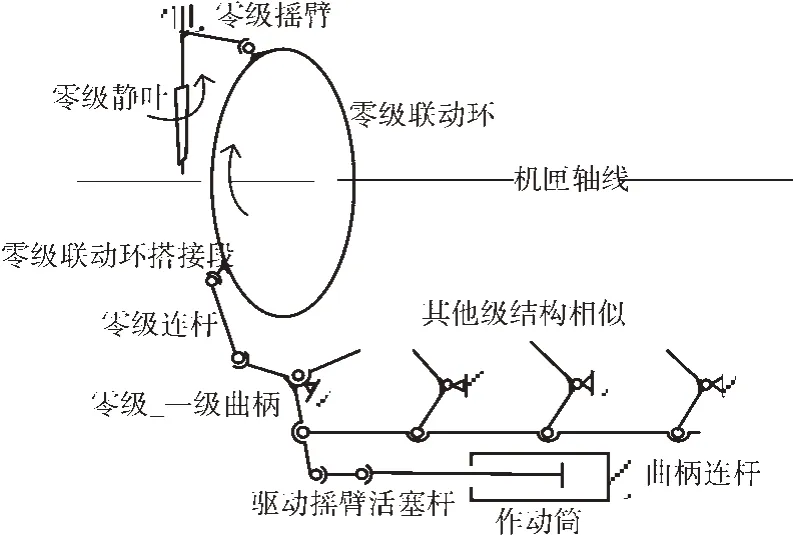
图1 VSV调节机构运动原理
机构几何模型通过CAD 软件绘制,再将部件导入多体运动学软件的方式进行构建[15]。根据机构构型和运动关系,可对机构几何建模进行适当简化。叶片可直接与地面相铰接,省去机匣和静子内环建模;在机构参数设计中不需考虑随机因素(加工公差、装配间隙)影响,因此不考虑部件运动的周向不一致,单级只选取1 个摇臂和叶片进行建模;在驱动部件中,作动筒、活塞杆以及起支撑作用的支架也省略。
1.2 机构参数化
由运动原理分析可知,在设计优化中,许多关键参数直接影响机构叶片调节规律。针对本文研究对象共有37 个参数需要确定,其物理含义见表1。V1~V3为0 级曲柄旋转轴定位和定向参数,结合参数V4~V7可对各级曲柄进行定位,参数V8~V13的各级物理意义相同,因此仅以0级为例说明。

表1 建模与分析特征参数
部件之间约束需要通过对应标记点来建立,这些标记点都依据表1 中的关键参数进行全参数化建模,以此构建的全参数化机构模型修改方便,为参数灵敏度分析与优化打下基础。
1.3 运动副与驱动添加
运动副也随几何建模进行相应简化,依照机构的运动原理将部件之间约束进行整理,运动学模型中的运动副见表2,运动学建模中按此加载即可;由于驱动部件作动筒与活塞杆未构建实体模型,因而可将其活塞杆平移运动规律换算为曲柄的定轴转动,以角位移驱动的方式进行加载。

表2 运动学模型中的运动副
2 VSV调节机构参数灵敏度分析
2.1 调节精度衡量指标
定义最大偏差角θmax作为衡量机构运动准确度和机构调节精度的指标
式中:θSi(t)为i级叶片转角的仿真值;θTi(t)为i级叶片转角的理论值,i= 1,2,3,4。
式中不包含0 级叶片转角的原因是:0 级叶片转角是其它各级理论值的取值基准,其它4 级叶片的仿真值与理论标定值的差异在0 级叶片转角相同条件下取得。从式(1)中可见,θmax值越小,叶片转动角度越接近理论标定值,机构调节精度越高。
2.2 参数对调节精度的影响分析
对于表1 中任意参数x,取n次值进行仿真就有对应的n个θmax,依据中心差分格式定义该参数对θmax的绝对灵敏度[16]为
绝对灵敏度Si值为正,表示该参数增大使最大偏差角变大,叶片角度调节偏离设计值,调节精度下降;反之,Si为负,表示该参数增大使叶片角度调节更贴近设计值。
本文取n= 5,即对表1 中37 个参数在设计范围内等距取5次值,按序号1~5从小到大逐渐进行灵敏度计算,得到各参数在允许范围内对调节精度的影响趋势。经总结,表1 中参数根据影响趋势的不同可分为2种类型。
第1 种 类 型 参 数 包 括:Bar_A、CrA、Bar_2_X、Link_A_0、Link_A_1、Link_A_2、Link_A_3、Link_A_4、Arm_A_0、Arm_A_1、Arm_A_2、Arm_A_3、Arm_A_4,共13个参数,限于篇幅仅以0级曲柄转轴点定位角(Bar_A)展示,其在允许变动范围内的Bar_A灵敏度见表3。从表中可见,以Bar_A为代表的设计变量灵敏度值在参数变化时都接近于0,这表明这些设计变量对运动精度的影响比较微小。
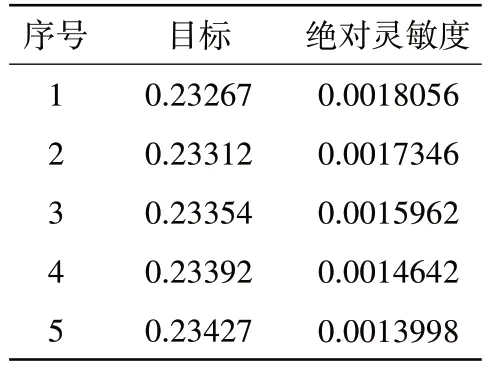
表3 Bar_A灵敏度
除以上参数外,表1 中其它参数为第2 种类型参数,同样限于篇幅仅以0 级摇臂长度(Arm_L_0)进行展示,Arm_L_0 绝对灵敏度见表4。以0 级摇臂长为代表的设计变量在其许用参数范围内,灵敏度值均有正有负,且在偏极小值时,灵敏度值为负值;在偏极大值时,灵敏度值为正值,这说明肯定存在1个值使灵敏度值为0,即运动精度针对该设计变量存在极小点。

表4 Arm_L_0绝对灵敏度
2.3 重要影响参数甄别
通过各参数绝对灵敏度对比,可以得到所有参数对调节精度的基本影响规律,若需对各参数进行横向比对,则应在绝对灵敏度Si基础上定义无量纲化的相对灵敏度Ri,以此来对不同类型尺寸特征参数(例如长度和角度)进行横向对比。相对灵敏度可定义为
37 个特征参数名义尺寸下相对灵敏度对比如图2 所示。从图中可见,按照对角度调节精度的影响程度由小到大排序,不难看出不同参数对角度调节的影响程度存在明显差异。

图2 不同参数相对灵敏度对比
从图中还可见,有9 个参数相较其它参数影响更为显著(见表5)。比较来看,摇臂臂长、曲柄臂长是对运动学设计角度调节精度影响较大的参数,在工程设计中应予以格外关注。而第4 级的摇臂和曲柄臂长影响程度较其它3级的明显更小,这是由于第4 级角度调节范围远远小于其它4 级的,而摇臂和曲柄的臂长又不影响其它级调节,因而第4 级参数影响程度偏低。
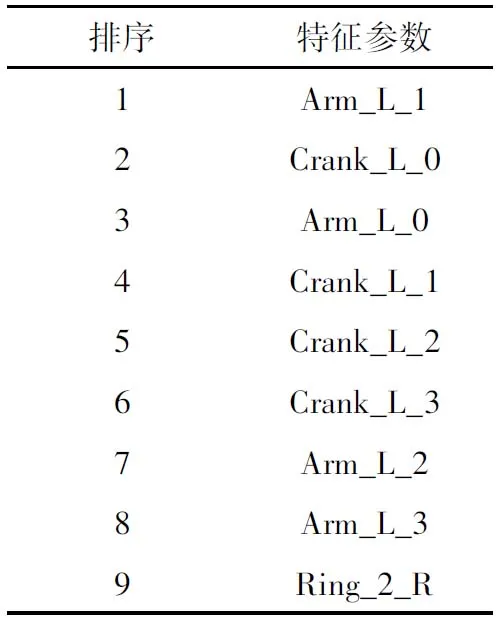
表5 影响较为显著的参数
通过无量纲化的相对灵敏度对比,明确了各参数对运动学设计中角度调节精度的影响程度,为调节机构冷态装配和调节提供重要的技术依据,也为全局灵敏度分析奠定基础。
3 机构调节精度优化分析
3.1 优化问题概述
VSV调节机构的运动学优化问题可以表述为
式中:xi为第i个特征尺寸的值;X为各特征尺寸参数组合成的矢量;ximax、ximin分别为第i个特征尺寸允许变化范围内的最大、最小值。
该优化问题涉及的模型复杂,参数数目和组合的方式都较多,直接进行优化计算耗时较长,因此本文以灵敏度分析结果为基础,剔除对调节精度影响较小的参数,有效降低参数向量组X的维度。VSV 机构优化面临的另一难点是,多体运动学软件自身优化算法有限,对于机构的运动学优化精度不足,因此本文使用自主优化程序与多体运动学软件联合优化,联合优化原理如图3 所示。在自主优化程序与多体运动学软件之间建立TCP/IP 通讯协议,以字节流的形式实现相互数据交换:自主优化程序采用SQP法在迭代步中根据模型计算结果更新搜索方向、残差、设计变量取值等信息,并通过字节流将当前设计变量取值传入多体运动学软件,多体运动学软件接收信息后完成运动学计算并返回目标函数结果,如此实现机构的运动学优化。
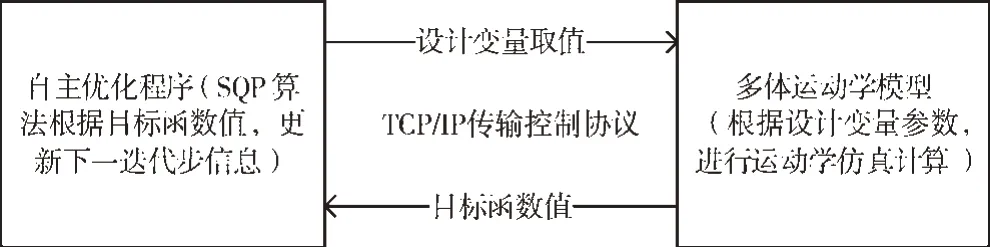
图3 联合优化原理
3.2 参数优化结果分析
SQP 算法[17]相较于其它非线性优化算法,具有求解效率高、不依赖于初值、自校正能力强等优势,因此本文对调节机构的优化也采取SQP 算法,将式(4)对应的优化问题依据原问题和约束条件构建新的拉格朗日函数作为目标函数,并二次近似为二次规划子问题,采用牛顿法不断迭代更新,最终求得最优解。
在参数选取方面,选取3 种参数组合进行对照分析。第1 组依据相对灵敏度分析结果,只对表5 中影响显著的参数进行优化分析;第2 组剔除绝对灵敏度分析中的13 个基本没有影响的参数,对其余24 个结果进行优化;第3组对全部37个参数进行优化。其优化前后最大偏差角对比如图4 所示。从图中可见,在未经优化时,最大偏差角4.8675°不能满足气动和总体要求;选取第1 组参数进行优化,经过12 次迭代,最大偏差角由4.8675°减小为0.4020°,符合设计指标,这证明仅对影响最为显著的参数进行优化即可满足设计要求,且计算耗时低,方便工程设计初期的快速性能迭代升级。后2组优化结果相同,从图4中还可见,对于运动学模型仿真1个周期,2组优化结果几乎完全一致,都经过16 次迭代,使最大偏差角度减小至0.2°,这证明选取更加全面的参数进行优化可以进一步提升调节精度,但无需所有参数全部参与寻优,可以剔除在允许变动范围内对调节精度结果基本无影响的参数,可以在对优化结果影响微乎其微的前提下,平衡优化精度与效率。
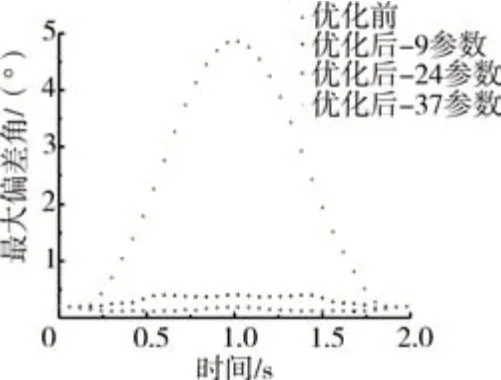
图4 优化前后最大偏差角对比
3 组不同参数选取下的优化结果对比表明,基于灵敏度分析进行参数降维后的优化结果满足实际应用所需的精度需求,同时也进一步证实了前文所述的按灵敏度分析对调节精度影响参数进行筛选和排序方法的可信性。
分组优化前后目标及设计参数值见表6。从表中可见,尺寸优化调整后调节精度进一步提升,但是大部分尺寸特征参数在优化前后变化幅度较小,这是由于:(1)大部分的参数对角度调节影响较小,因此这类参数在优化迭代过程中并未得到显著改变;(2)少量参数对角度调节影响较大,仅仅需要小幅变化即可提升角度调节精度。
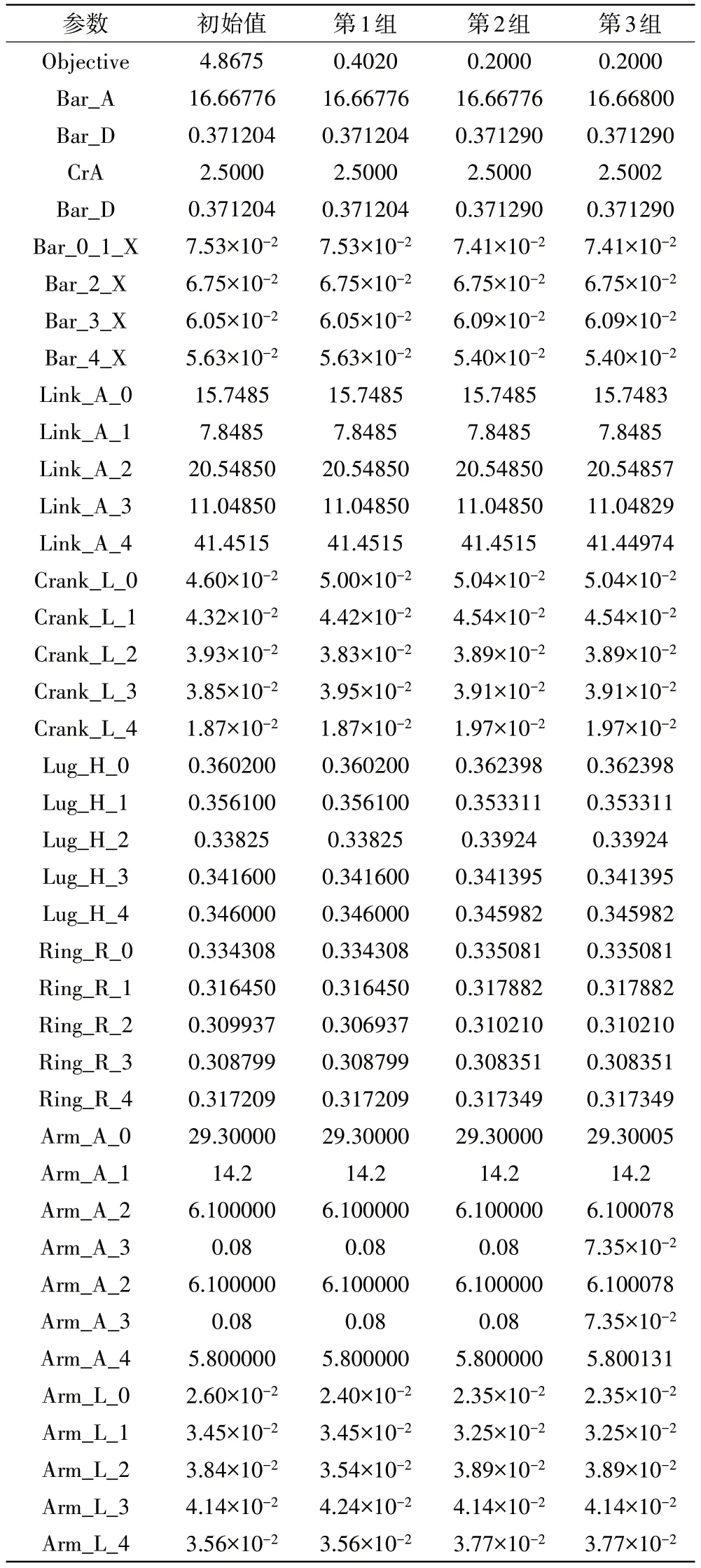
表6 分组优化前后目标及设计参数值
4 结论
(1)通过局部绝对灵敏度分析加强了设计变量对调节机构调节规律影响的认识,即大部分设计变量在有效域内存在极小点或对角度调节偏差影响较小。
(2)选取3 组不同参数进行运动学优化,优化结果均能使调节精度满足总体要求,验证了局部灵敏度分析的准确性和所提出的变量降维预处理优化方法的可信性;通过局部灵敏度分析剔除影响较小参数而后进行优化分析,这是一种效率和精度兼具的优化方法,可在减小计算规模的同时获得与全部参数优化基本一致的结果。
(3)通过建立TCP/IP 通讯协议传输数据的方式实现了自主SQP 优化程序与多体运动学软件的联合优化,相较于传统的虚拟样机优化和几何评估方法,其精度更高,可用于后续类似的复杂高维空间机构问题的优化求解,同时也为多模块仿真和优化分析提供了新的技术途径。
