基于智能机器人案例开展物联网专业实践教学的研究
2023-09-17刘宝静刘欣欣邢丹崔荣梅
刘宝静 刘欣欣 邢丹 崔荣梅

关键词:智能机器人;物联网专业;实践教学
一、设计网球捡球智能机器人的意义
工业和信息化部、国家发展和改革委员会、科学技术部等十五部门联合印发了《“十四五”机器人产业发展规划》。该规划提出,到 2025 年,我国将成为全球机器人技术创新策源地、高端制造集聚地和集成应用新高地[1]。网球虽起源于法国,但在中国,随着网球一姐李娜的带领下,网球运动也迅速发展起来,越来越多的人开始投入其中。网球场长23.77 米、宽8.23 米。打完球后,网球散落一地,必须得将其捡起来,这不仅浪费时间,也降低了训练的乐趣。在专业的网球比赛中,需要六个球童负责捡球。而网球捡球智能机器人的设计目标就是代替这些球童完成捡球工作。
基于网球捡球智能机器人案例,开展物联网专业实践教学体系的建设,集科技、体育、趣味、创新于一身,是打造应用型创新本科教育的重要发展方向。
二、网球捡球机器人的设计分析
网球捡球智能机器人模仿球童的工作,主要完成三个任务,即“发现网球”“跑到网球位置”“捡起网球”。机器人的“识别系统”相当于人的“眼睛”,需要在网球场特定区域内准确识别出网球,并分析出网球中心点的坐标,然后把此坐标发送给机器人的“大脑”进行下一步处理。当机器人“大脑”收到“眼睛”发送的网球坐标后,发出相关指令控制“运动系统”(相当于人的“脚”)向目标位置跑去。当机器人“跑”到网球所在位置时,“大脑”发出指令控制“抓取系统”(相当于人的“手”)抓住网球,完成一个捡球任务。
综上所述,网球捡球智能机器人主要由三部分组成,即“识别系统”“运动系统”和“抓取系统”。这三部分由“大脑”进行信息收集和命令控制。
(一)机器人“识别系统”的设计思路及课程规划
1. 主要任务
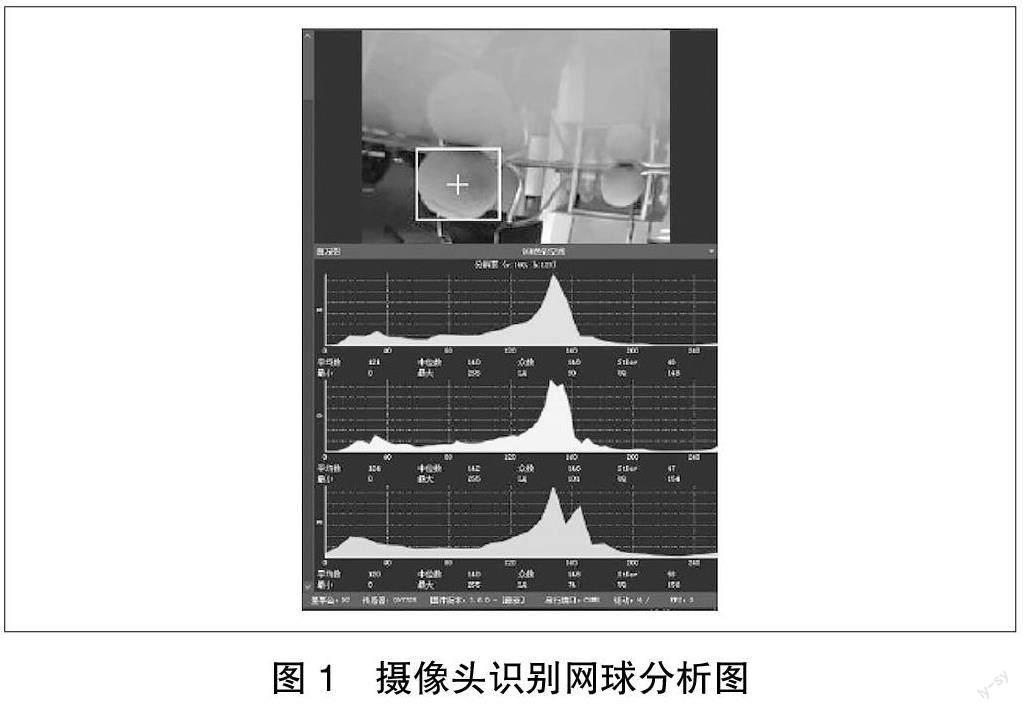
机器人的“识别系统”主要依赖于摄像头技术,需要完成多个任务:首先,在视野中通过颜色、大小、特征值等多种方式确定网球目标。如果有和网球颜色相近的物体存在,则通过算法来识别网球。如果视野中没有发现网球,则发出指令让机器人原地转圈,使得摄像头的视野发生变化后,继续寻找网球。其次,当视野中发现有多个网球时,必须通过算法确定抓网球的顺序。最后,它能够发出指令让机器人向着指定方向移动。图1显示了通过摄像头识别网球的示例。
2. 市场技术分析
目前国内外市场上,有几种较为成熟的主流摄像头技术,包括OpenMV、OpenCV、K210 和V831。
OpenMV 摄像头是一款可编程单片机摄像头,具有图像處理功能,它的核心CPU 是STM32H743 ARMCortex M7 处理器。该摄像头通过MicroPython 语言编程,内置了一些图像处理算法,使用方便,但不支持比较复杂的算法,如OCR 识别、车牌识别、猫狗分类等。
OpenCV 是一个跨平台的计算机视觉和机器学习软件库,高效轻量,由一系列C 函数和少量 C++ 类构成,同时提供了Python、Ruby、MATLAB 等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法[2],支持各类复杂算法,比如OCR 识别、车牌识别、猫狗分类、深度学习等,但硬件成本较高,需要基于树莓派或Linux 平台上进行开发。
K210 是一款具有64 位双核、硬件FPU、卷积加速器、FFT、Sha256 的RISC-V CPU 处理器。其成本相对较低,支持部分复杂算法,比如OCR 识别、车牌识别、深度学习等,但基础库不如OpenMV 丰富。
V831 是基于linux CPython 实现跨平台统一的简化Linux 嵌入式设备。它支持复杂算法,成本比OpenCV更低,但需要在Linux 环境下进行开发。
3. 在物联网专业实践教学中的课程规划
机器人“识别系统”涉及到多个方面的知识和技术,包括Python 语言编程、图形图像知识、linux 操作系统、人工智能算法原理等。对应课程包括《传感器原理及应用》《Python 语言开发》《linux 操作系统》《视觉物联网技术及应用》《人工智能图像算法》等。
机器人“识别系统”是一个综合性较强的课程,需要学生具备扎实的基础知识和编程实践经验,并能够将多个学科领域的知识相互融合,形成完整的机器人识别系统。
(二)网球捡球机器人“运动系统”的设计思路及课程规划
1. 主要任务
机器人的“运动系统”(相当于人的“脚”),主要由各种驱动电机技术完成。机器人收到摄像头发来的网球目标坐标后,执行前进、后退、停止、左转、右转、转圈等动作。四轮机器人的车轮如图2 所示。
2. 市场技术分析
控制机器人运动的电机,可以选择多重驱动方式,如直流电机、减速电机等。机器人运动的车轮可以采用橡胶轮、履带式、麦克纳姆轮等方式。为保证车轮的平稳运动,可以使用PID 控制技术实现车速的自动控制,同时也可以通过陀螺仪等角度传感器实现精准度的控制。
直流电机动力较小,控速精准度低,但优点是控制简单,编程容易。如果选择减速电机,在机器人行驶过程中,CPU 实时接收减速电机编码器的脉冲数值,并通过此数据进行左右矫正。机器人行走距离可以用下面这个公式计算:行驶距离= 脉冲数/ 倍频数/ 编码器线数/减速比* 车轮周长。机器人行走速度可以通过PID 进行闭环控制矫正,PID 控制原理图如图3 所示。
3. 在物联网专业实践教学中的课程规划
在机器人“运动系统”中,需要掌握各种驱动电机的知识和技术,包括直流电机、减速电机、PID 自动控制、陀螺仪角度传感器等方面。对应课程主要包括《单片机原理及应用》《微型计算机原理及应用》《自动控制技术原理及应用》《嵌入式网关及控制技术》等。
(三)机器人“抓取系统”的设计思路及课程规划
1. 主要任务
网球捡球机器人的“手”需要有高度灵活性和足够的扭矩和承载能力才能完成抓球工作。手臂需要实现肩、肘、腕和手的复杂转动,每个关节的转向范围不同,机械爪需要能够张开、抓取和释放。该机器人的5 自由度机械臂结构如图4 所示,并且多个单独关节之间需要实现复杂联动。
2. 市场技术分析
机器人的机械臂及机械手的运动主要通过联动多个舵机来控制。舵机是一种适用于需要角度不断变化并可以保持稳定的控制系统的位置(角度)伺服驱动器。舵机主要分为数字舵机和模拟舵机。它内部有一个基准电路,产生20ms 周期、1.5ms 宽度的基准信号,并通过比较直流偏置电压与电压器的电压来获得输出电压差。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
3. 在物联网专业实践教学中的课程规划
在机器人“抓取系统”方面,主要知识包括数字舵机、模拟舵机、PID 自动控制、舵机联动算法等,对应课程主要包括《单片机原理及应用》《微型计算机原理及应用》《自动控制技术原理及应用》《嵌入式网关及控制技术》等。
(四)网球捡球机器人“大脑-CPU”的设计思路及课程规划
对各种信息进行处理需要CPU 来完成,智能机器人的CPU 一般采用嵌入式计算机系统来完成,市场主要技术包括C51、STM32、LinuxA7 等不同档次的嵌入式系统,对应课程主要包括《单片机原理及应用》《微型计算机原理及应用》《自动控制技术原理及应用》《嵌入式网关及控制技术》《嵌入式操作系统》等。
三、网球捡球机器人系统的设计分析及课程规划
作为一个网球捡球机器人,它通过“眼睛看”“跑过去”“捡起来”等动作,完成了代替球童捡球的主要工作。但是对于球场管理者来说,他们希望能夠远程实时了解球场的捡球数量,并能够远程控制机器人的开关等功能,因此,该球场系统需要增加网球的“存储管理”“远程控制”等功能。
(一)存储管理功能的设计思路及课程规划
机器人的存储管理功能主要由物联网通信技术、数据库存储技术、信息安全技术等多种技术共同完成。
本系统需要通过无线技术远程发送给球场管理者,因此本案例数据库存储主要指云存储技术。云存储主要包括华为云、腾讯云、电信云等,分为IaaS、PaaS、SaaS 等不同方式,基础设施在最下端、平台在中间、软件在顶端。对应课程主要包括《TCP/IP 技术及应用》《数据库原理及应用》《网络信息安全》《云计算与虚拟化》等。
(二)远程控制功能的设计思路及课程规划
机器人的远程控制功能主要由物联网通信技术、物联网应用层设计等多种技术共同完成。
物联网通信技术可以分为近距离传输和远距离传输两种方式。近距离传输方式主要有红外、蓝牙、WiFi、UWB、ZIGBEE 等,信号覆盖范围则一般在几十厘米到几百米之间;远距离传输方式主要有NBIOT、MQTT、LoRa 等,信号覆盖范围一般在几公里到几十公里之间。对应课程主要包括《TCP/IP 技术及应用》《传感网原理及应用》《物联网通信技术实训》等。
球场管理者的操作平台可以是基于微信小程序的移动端,也可以是基于linuxQT 开发的嵌入式平台。云端数据与微信小程序之间,通过HTTP 协议接口、POST方式发送操作指令、GET 方式获取云端数据。相关课程包括《基于物联网技术的微信小程序设计》等。基于LinuxQT 的嵌入式平台,则需要学习Linux 系统、C++编程语言、QT 开发接口、图形化应用层设计等。相关课程包括《网络编程技术及应用》《嵌入式网关及控制技术》《嵌入式操作系统》等。
四、结束语
基于网球捡球智能机器人案例,开展物联网专业实践教学体系的建设,将科技、体育、趣味和创新融合为一体,彻底改变了现有实践项目的零散现象。在技术、思想和素质上符合物联网专业能力主线的发展,实现了多门实践课程之间的关联整合。这种全面的实验教学体系培养了应用型创新人才,迅速推动了物联网工程专业的一流本科建设发展之路。
作者单位:刘宝静 刘欣欣 邢丹 崔荣梅 河北传媒学院
