基于创新能力培养的机器人认知实践教学体系研究与探索
2023-08-21崔兰花郑红伟王伟毕海霞
崔兰花,郑红伟,王伟,毕海霞
(1.河北工业大学 图书馆,天津 300401;2.河北工业大学 实验实训中心,天津 300401;3.河北工业大学 大学生创新创业中心,天津 300401)
随着机器人技术的日趋成熟,机器人开始被应用于众多领域,如工业制造、航空航天、日常生活等。大学生有必要在校期间根据自身需求学习与机器人相关的课程[1-2]。实践教学是人才培养中不可或缺的重要环节[3-4],也是培养学生创新意识和实践应用能力的重要一环[5]。机器人实训平台在传授知识、塑造理想、提升技能、完善品格等方面发挥了重要作用[6]。为适应和满足未来社会需求,国内诸多高校相继建立机器人实训平台,匹配了相应的机器人技术教学资源,开设了与之相关联的课程。如中国矿业大学等高校以轮式移动机器人和类人机器人为载体构,建机器人实验教学平台,面向工科类学生开展创新实践综合性教育[7];西安工业大学从机器人工程专业需求出发,创建基于跨学科知识融合的机器人理论、层次化分模块实践、项目导向的课外实践等教学模式[8];天津理工大学以优化设计及运动控制为研究对象,构建了开放性同型异构机器人实验教学平台,开展专业性较强的机器人实践教育[9]。该类实验教学项目具有专业性强、能力要求起点较高等特点,对于无专业基础的文理科学生而言具有一定难度。鉴于此,河北工业大学搭建了一个以“认知、实践、创新”为目标的层次化、竹节式机器人实践教学体系,满足了文科生认知了解机器人、理科生实践搭建机器人和工科生创新设计机器人的需求。
1 机器人实践教学体系的研究
围绕学校“双一流”建设下的人才培养目标,以满足全年级所有专业学生实践为目标,依托学校的机器人实践平台,探索了一条不同专业、各年级适用的机器人技术认知及实践之路,形成了以工程认知能力培养为常态、以实践动手能力培养为重点、以创新意识和能力培养为核心、以工程素质培养为目标的层次化、竹节式机器人实践教学体系。具体的授课对象、实训内容、教学目标等设置如图1 所示。

图1 机器人认知实践教学体系
1.1 确定机器人认知实践建设思路,构建竹节式多层次实践教学体系
依托机器人实践平台,以全员学习机器人知识为目标,研究多层次的机器人教学体系构建之路。根据面向授课对象不同、文理工科学生学习目标不同、能力水平参差不齐等特征,将机器人教学划分为了4 个层级,包括了以认知过程为导向的基础层、以实践过程为导向的能力提高层、以创新意识和能力培养为导向的综合创新层和以工程素质培养为导向的自主创新层教学。
(1)以认知过程为导向的基础层。2016 年,新工科的概念被提出[10],在其教育教学发展新需求中也提到了工科、新工科与人文社科之间的相互渗透关系,其具体表现为人文社科的专业知识无形影响工科学生文化素养的形成,新工科也对人文社科专业的工程认知能力提出了新的要求[11-12]。以工科为特色的高等院校是进行工程认知能力培养的良好基地,有着学科优势。以“工学并举”为特色的河北工业大学,工科是优势学科,有着深厚的工程文化底蕴和丰富的实践资源,多类型机器人设备、经验丰富的教师等资源为开展机器人技术知识认知提供了便利。依托学校资源,笔者确定了以培养文理工科全年级工程认知能力和传承“工学并举”文化为宗旨,以了解基本知识、熟悉机器人结构为教学目标,通过整合轮式移动机器人、水下机器人、工业机器人等设备资源,设计了融科学性、趣味性和观赏性为一体的教学内容。
以有趣的视频吸引学生的注意力,如机器人跳舞、演奏等,使学生感知机器人;以工程文化之旅体验机器人智能化工作过程,如深入基于机器人的汽车智能化车间,近距离观看机器人实操过程,深刻体会机器人在现代制造技术领域的重要作用,了解工程文化;以身边实物制作过程为题引导学生以科学的眼光看待机器人技术,如“自行车的主车体如何完成连接?”“汽车表面喷漆如何完成?”引导学生深入思考,引出机器人技术在日常生活中的重要性;以实操性强的机器人实物演示激发学生动手实践内在需求,如水下机器人、轮式移动机器人和搬运机器人等自组装过程及竞赛演示。
(2)以实践过程为导向的能力提高层。实践是高等工程教育的基本特征之一[13],是知识转化为能力的主要方式。故该层主要围绕技能和实践能力培养[14],以融合多知识点的项目为载体,通过动手实践使学生有效应用机器人理论知识,掌握课堂所学知识点。
能力提高层设计了多个平行实验项目,每个实验项目可实现对一个或多个知识点的学习以及对一个或多个技能的锻炼,同时,多个不同实验项目也可实现对同一个知识点或同一个技能的学习和锻炼。学生通过实践训练、模型构建、程序调试,掌握知识点,培养实践动手能力。如学生利用舵机控制原理设计了简易轮式移动机器人项目,实现舵机转速控制;利用传感器智能识别知识,验证了难了具有相同功能的红外测距传感器和红外接近传感器在避障机器人系统中不同的应用效果对智能机器人利用摄像头实现寻物功能进行训练等。
(3)以创新意识和能力培养为导向的综合创新层。该层设计了基于模块化机器人套件和基于仿生机器鱼套件的两个实践套餐,每个套餐含有多个实践项目,每个项目包含设计、装配及调试或设计、加工、装配及调试环节,所用设备需至少含有一种机器人套件、一种三维设计软件、一种零部件加工设备。如运球机器人项目,学生团队根据项目功能需求,在现有套件基础上,采用三维软件创新设计机器人机械结构,利用3D 打印或激光切割机加工部分零部件,运用钳工设备进行机器人装配,接入编写的控制程序开展动作调试,撰写设计说明书。
(4)以工程素质培养为导向的自主创新层。工程素质的主要内涵包括四个方面:①有比较扎实的技术基础;②受过必要的工程实践训练;③有分析和解决工程实际问题的能力;④能够吃苦耐劳,适应较艰苦的工作环境。笔者在该层以四项工程素质培养为目标,设置了较高科技水平的科研项目、校企合作项目、匠心训练项目和竞赛项目等实践内容(见表1)。

表1 实践项目与工程素质培养匹配表
1.2 常规式和开放式并行的机器人实践运行模式
机器人实践运行模式根据教学层次的不同而采取了常规式和开放式混合式教学模式(如图2 所示),实现了并行运行。常规式是在固定时间、地点、资源的模式下进行常态化教学,包含了工程训练系列必修课、公共选修课等;开放式是在时间、地点、资源开放模式下进行的自主化教学,需要通过网上预约审核流程进行实践,每组4~6 名学生在教师的指导下于一个学期内完成实践项目。
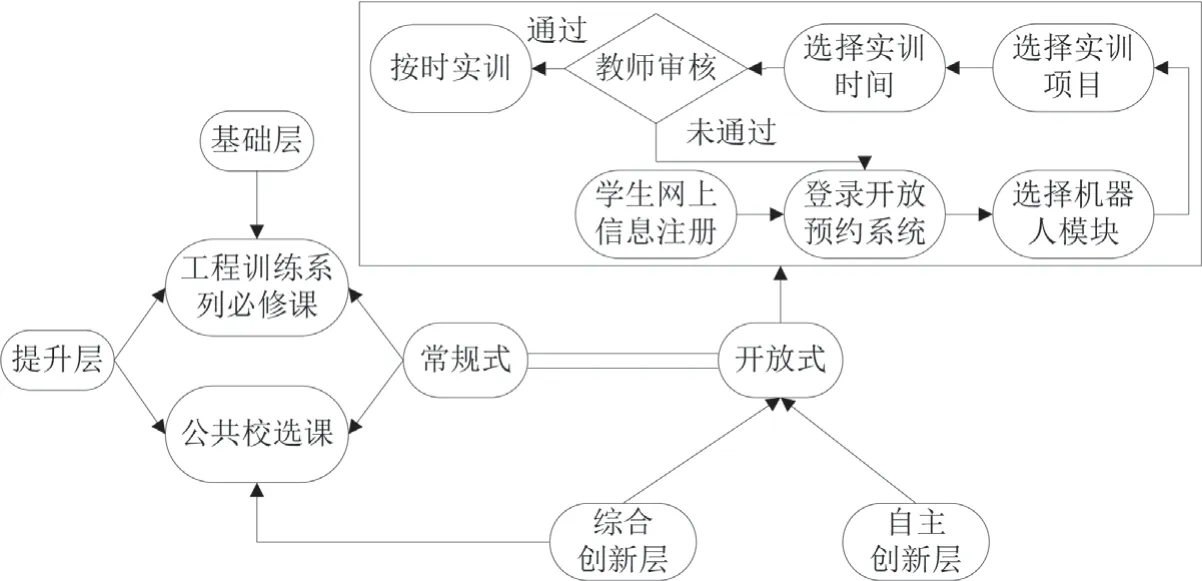
图2 机器人实践教学体系运行模式
1.3 实训成绩评定
教师根据学习层次的不同对学习成绩做了不同的评分标准,成绩评定表见表2 所示。
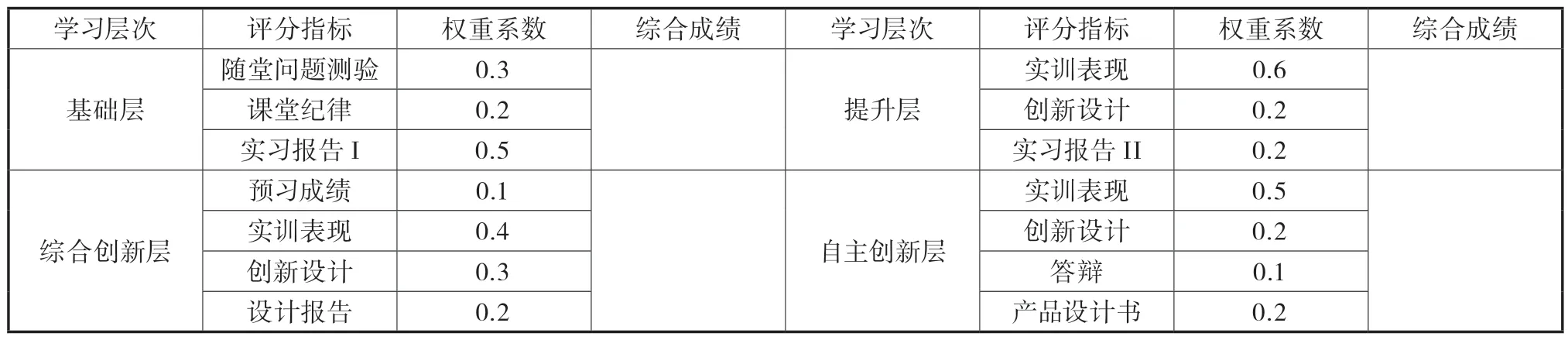
表2 成绩评定表
2 机器人实践效果
自2017 年开始,学校开设了面向全校专业学生的工程认知课程,机器人技术认知课是其中之一。近两年的课程满意度调查结果显示,机器人技术认知课在12 门认知课中名列前三,受到了广大学生的好评。
2018 年伊始,四个小组12 位学生参加大学生机器人竞赛,经过近半年的独立学习,从机器人文献调研、方案设计、原理设计、零件加工到实物功能实现,在天津市机器人赛事上获得了一等奖和二等奖各两项;在河北省机器人竞赛中获得了一等奖两项和二等奖一项;在国赛中获得了特等奖和三等奖各一项。学生进行实践训练与竞赛的部分作品如图3 所示。
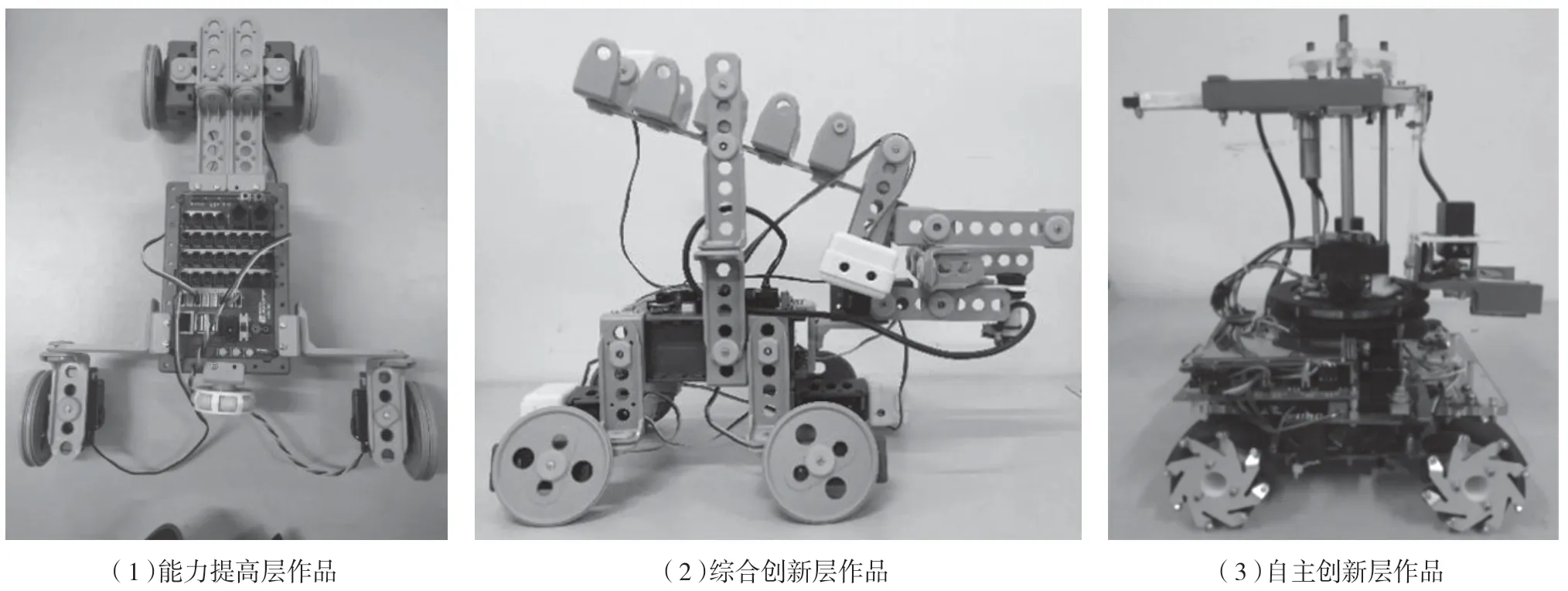
图3 学生作品
3 结语
“认知、实践、创新”的层次化、竹节式机器人实训平台建设,一方面完善和优化了机器人实训体系,实现了机器人技术知识学习的全覆盖;另一方面也更加契合了理、工、文科不同专业学生对机器人实践的需求。通过该系统下的机器人知识学习,有效提高了学生的学习兴趣,激发了学生的学习热情,促进了学生学习效率的提高。
