基于组合算法的配电网继电保护优化整定计算方法
2023-07-13李文伟韦思南汪清涓冯志东
李文伟,韦思南,汪清涓,冯志东
(广西电网有限责任公司钦州供电局, 广西 钦州 535000)
0 引言
随着用电用户数量的不断增长,直接导致用电量以及配电网规模的不断增长.如此庞大的配电网会存在很多问题,其中之一就是无法准确确定系统中各个继电保护装置的配合关系[1-3].过流继电器是电力系统中最常用的保护装置,已被广泛应用于径向配电网以及环形配电网的继电保护[4].此外,为了节约资源、保护环境,分布式发电技术也逐渐成熟,大量的分布式电源开始并网.分布式电源的接入会导致电网结构的变化,直接导致继电保护之间的配合关系更加复杂.因此,应当研究新的继电器优化整定方法,以应对结构更加复杂的配电网中的继电保护优化整定问题[5-7].
文献[8]使用图论算法来对复杂环网中的继电保护装置进行优化整定计算,以确定主、后备继电保护的关系,最终构建出最优的继电保护方案.文献[9]使用Firefly算法来优化计算多回路模型配电系统上的继电器保护定值.文献[10]提出了一种解决测量数据缺失和错误情况下的配电网电流保护自适应整定方法.文献[11]采用统一建模语言对配电网继电保护整定系统进行了建模,并建立了故障模块的对象模型和动态模型.文献[12]提出了一种改进的自适应遗传算法对继电保护定值进行了优化.
本文中针对暂态故障情况下使用过流继电器反时限特性曲线无法准确计算继电保护定值这一问题,提出一种基于线性规划的继电器优化整定方法,并将该方法与遗传算法相结合,提出一种基于组合算法的配电网继电器优化整定计算方法,用于解决配电网中的继电保护整定计算问题.
1 基于线性规划的继电器优化整定方法
1.1 继电器特性方程假设所有继电器相同,且具有相同的反时限过流保护特性,表示为[13]:
(1)
I0=If/Iop
(2)
其中,top为继电器的动作时间,在一般反时限特性中,λ为0.14,γ为0.02.I0为短路电流倍数,If为故障电流,Iop为启动电流.当I0大于1时,保护动作;I0小于1时,保护不动作.
1.2 继电器动态方程继电器的动态方程在积分状态下可以表示为:
(3)
其中,tre为继电器的动作时间与复位时间,可以表示为:
(4)
其中,tr与M是与反时限特性曲线相关的常量参数.当故障电流大于启动电流时,式(3)的积分值将增加,当故障电流减小至低于启动电流时,式(3)的积分值将减小.若式(3)的积分值达到1时,则触发动作指令.
1.3 继电器动态方程的线性规划两级划分方法由于求解式(3)非常复杂且耗时.因此,本研究首先将继电器动态方程转化为线性方程,提出了一种在出现故障电流情况下进行继电器整定的新方法.
如图1所示,首先将故障电流划分为两个部分,表示为I′f与I″f,根据式(1)与式(3),继电器的动作时间可以表示为:

图1 线性规划两级划分方法示意图
(5)
其中,T1与T2分别为由于故障电流I′f与I″f下的继电器动作时间,可以表示为:
(6)
(7)
当式(5)的积分为1时,则继电器将触发动作指令,式(5)可以表示为:
(8)
通过求解式(8),则继电器的动作时间可以表示为:
(9)
式(9)为线性方程,更容易求解.然而,由于故障电流划分间隔较大,式(9)的求解精度可能不高,因此本研究提出了一种多级线性规划划分方法.
1.4 继电器动态方程的线性规划多级划分方法如图2所示,在多级线性规划划分方法中,故障电流被划分为I1,I2,…,Ix,T1,T2,…,Tx由式(6)与式(7)确定.根据式(5),故障电流被划分为x级时,继电器的动作时间可以表示为:

图2 线性规划多级划分方法示意图
(10)
可得:
(11)
则:
(12)
根据式(1)、式(6)与式(7),式(12)的第一部分取决于继电器的时间整定系数TDS.因此,主、后备保护的动作时间分别表示为:
(13)
(14)
其中,tmain与tback分别为主、后备保护的动作时间,omain与oback为式(17)的第二与第三部分.根据式(12),x取决于继电器的动作时间,通过对式(13)与(14)进行逐步迭代计算获得tmain与tback.开始时,设定x为1,在迭代过程中,主、后备保护的x值由下式逐步更新:
(15)
(16)
其中,Δt为整定时间间隔,取值为0.2~0.4.
1.5 基于线性规划的继电器优化整定方法继电器的最优整定问题可以表示为:
(17)
其约束为:
tback-tmain≥Δt
(18)
(19)

基于线性规划的继电器的优化整定求解如下所示:
min(Wx)
(20)
其约束为:
Tx≤ox
(21)
(22)
通过将式(13)和(14)代入式(18),由继电器时间整定系数TDS组成的矩阵Tx为:
(23)
ox由独立于TDS的剩余表达式形成,表示为:
(24)
将式(12)代入式(17),可得到由继电器时间整定系数TDS组成的矩阵Wx表示为:
(25)
本文中提出的优化整定方法的步骤如下:
步骤1:计算故障电流;
步骤2:设定主、后备保护的xmain与xback为1,
步骤3:根据主、后备保护的xmain与xback计算矩阵Tx、矩阵ox与矩阵Wx;
步骤4:根据式(13)与式(14)计算出主、后备保护的动作时间tmain与tback;
步骤5:根据式(15)与式(16)更新主、后备保护的xmain与xback;
步骤6:判断xmain与xback是否变化;
步骤7:若变化,则返回步骤3,若不变化,则计算出了最优继电器时间整定系数TDS.
2 基于组合算法的继电器优化整定方法
本研究将启发式算法中的遗传算法[14]与线性规划算法相结合,提出一种结合了遗传算法与线性规划算法的组合算法来计算继电器的继电器时间整定系数TDS与启动电流.在迭代过程中,启动电流由遗传算法确定,继电器时间整定系数TDS由线性规划算法计算.
遗传算法的目标函数为式(17)所示的继电器动作时间总和,其约束为式(18)和(19).首先,设置初始启动电流,并使用启动电流计算矩阵Tx、矩阵ox与矩阵Wx;随后,使用线性规划算法计算出最优时间整定系数TDS和继电器的动作时间.随后,遗传算法将计算出的动作时间进行评估计算,若当前计算出的动作时间未达到最优,则重复以上过程以找到最佳启动电流.遗传算法的流程图如图3所示,本文中提出的组合算法的流程图如图4所示.

图3 遗传算法流程图
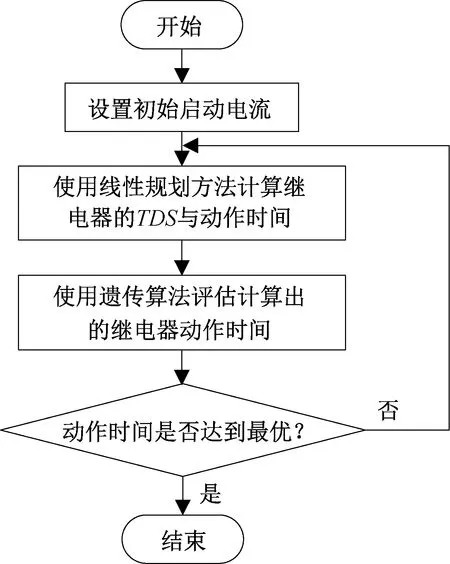
图4 组合算法的流程图
3 结果与分析
本文中采用IEEE-9总线系统与IEEE-14总线系统对提出的算法进行测试.为了评估所提出的方法,在4种不同的案例下进行继电器优化整定计算,并进行对比分析.
案例1:假设故障电流固定,使用线性规划算法进行过流继电器整定计算.
案例2:使用遗传算法进行过流继电器整定计算.
案例3:使用提出的线性规划方法进行过流继电器整定计算.
案例4:使用提出的组合算法进行过流继电器整定计算.
3.1 IEEE-9总线系统的测试结果IEEE-9总线系统如图5所示.在该网络中,安装了18个过流继电器.为了评估所提出的方法,接下来将这4种案例下的继电器整定计算结果进行对比分析.其中,设定整定时间间隔Δt为0.4 s.在启动电流方面,设定案例1、案例2、案例3中继电器的启动电流为150 A,设定案例4中整定算法计算的启动电流范围为200~500 A.
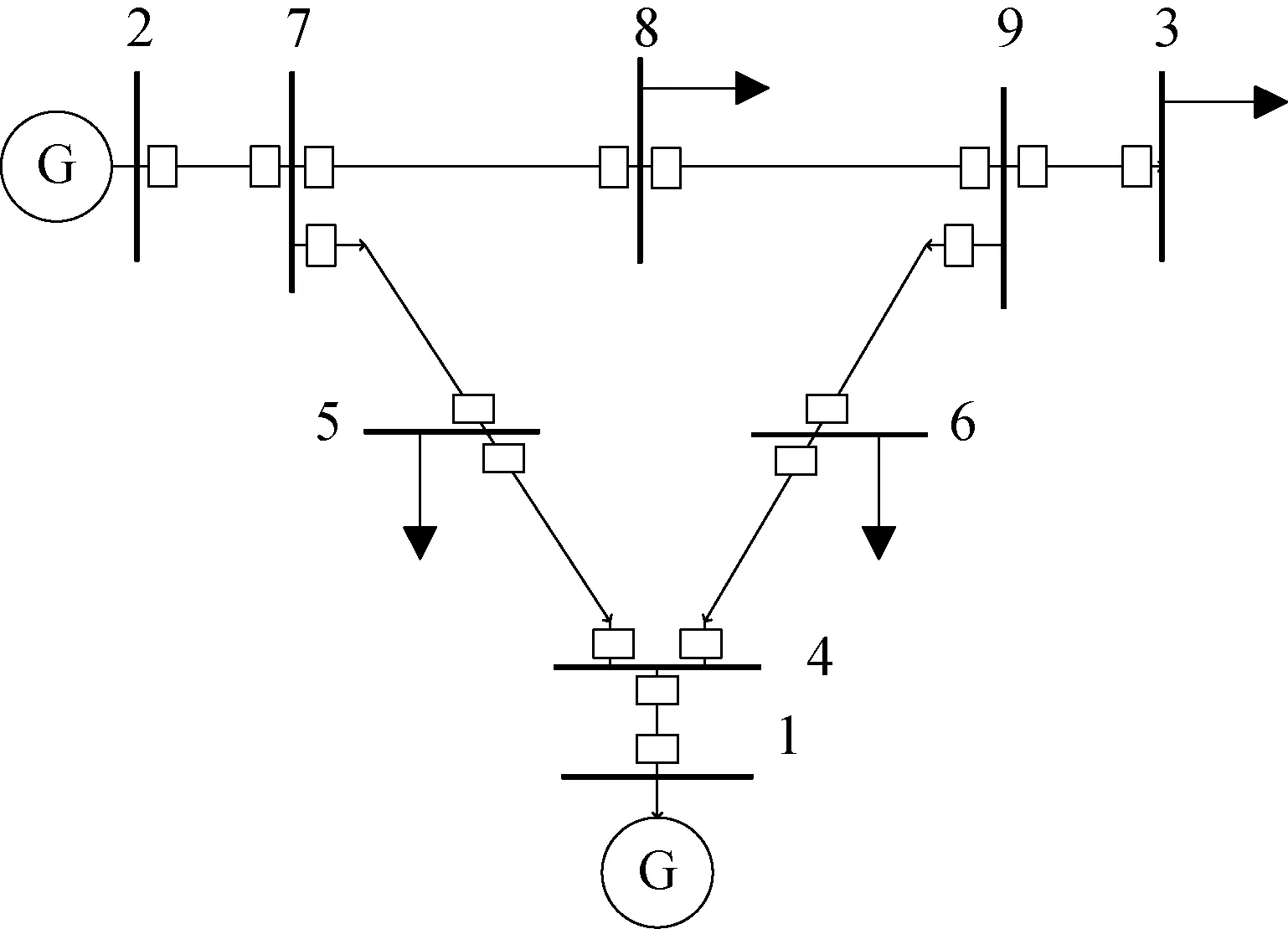
图5 IEEE-9总线系统
表1给出了4种研究案例情况计算出的时间整定系数TDS和启动电流.表2给出了4种案例情况下计算的主、后备保护对于故障电流的动作时间间隔.可以看出,案例1情况下计算出的主、后备继电器的动作时间间隔在一些情况下定于设定的0.4 s.

表1 IEEE-9总线网络的整定计算结果

表2 部分主、后备继电器的整定时间间隔 s
运行时间对比结果如表3所示.根据表3所示,相比于使用传统遗传算法的案例2,使用本文中提出的线性规划方法的案例3计算出了更低的平均动作时间(t=0.734 s),并且其计算时间明显低于案例2的计算时间,证明了本文中提出的线性规划方法的可行性.此外,将4种案例情况下计算出的平均动作时间进行对比,使用本文中提出的组合算法的案例4计算出的平均动作时间最短(t=0.426 s),证明该方法可行有效.

表3 4种案例的计算结果对比
3.2 IEEE-14总线系统的测试结果IEEE-14总线系统如图6所示.在该网络中,安装了40个过流继电器.部分继电器的整定计算结果如表4所示.值得注意的是,在案例1情况下使用固定故障电流计算出的继电器的时间整定系数TDS的结果中出现了14个未满足整定约束(整定时间间隔Δt为0.4 s)的结果,这表明在存在暂态故障电流的情况下,传统方法无法计算出准确的结果.表5给出了4种案例情况下计算的主、后备保护对于故障电流的动作时间时间间隔.根据表5同样可以看出,案例1情况下计算出的整定时间间隔在部分情况下低于设定的0.4 s.
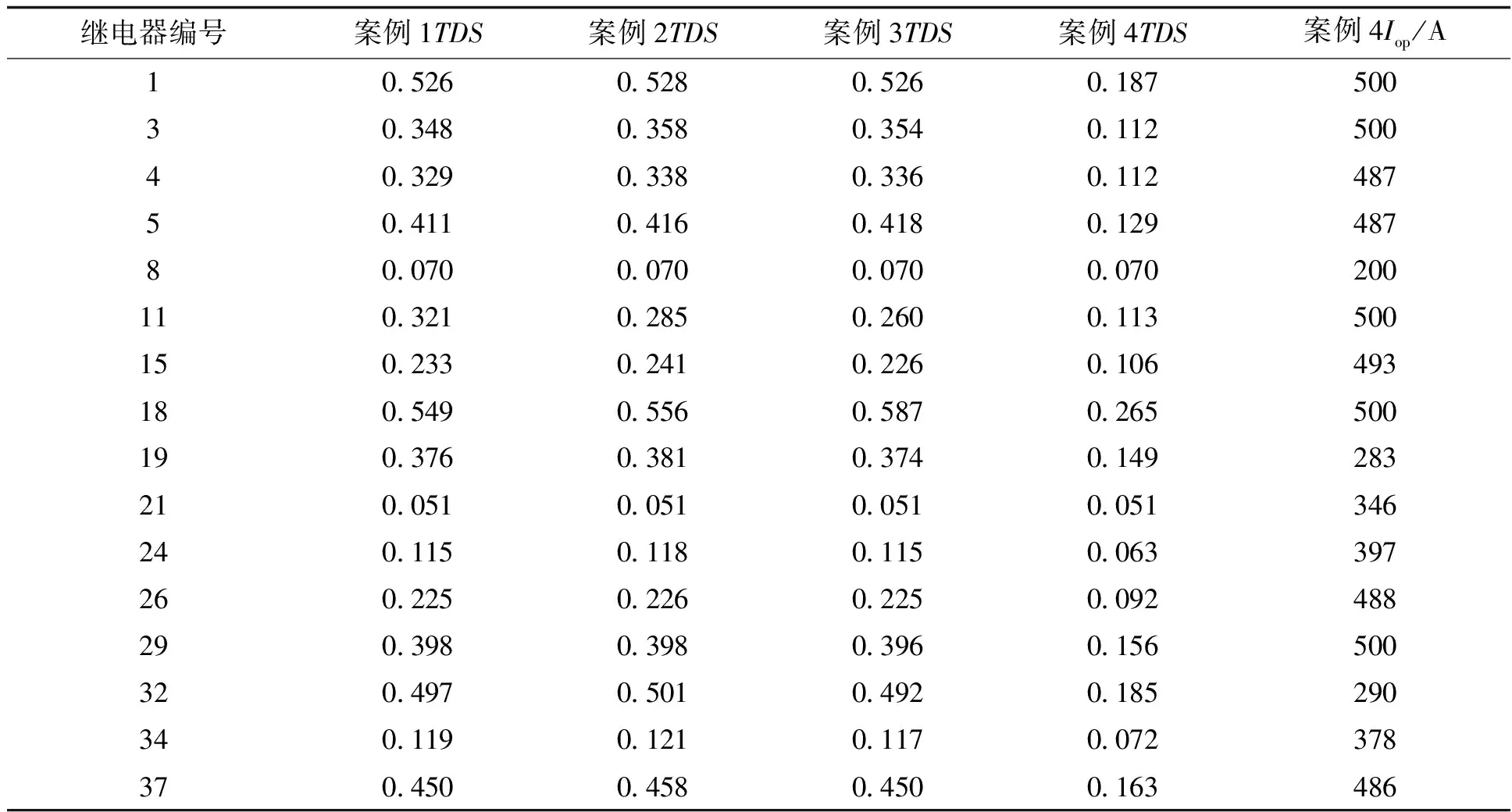
表4 IEEE-14总线网络的部分整定计算结果

表5 部分主、后备继电器的整定时间间隔 s
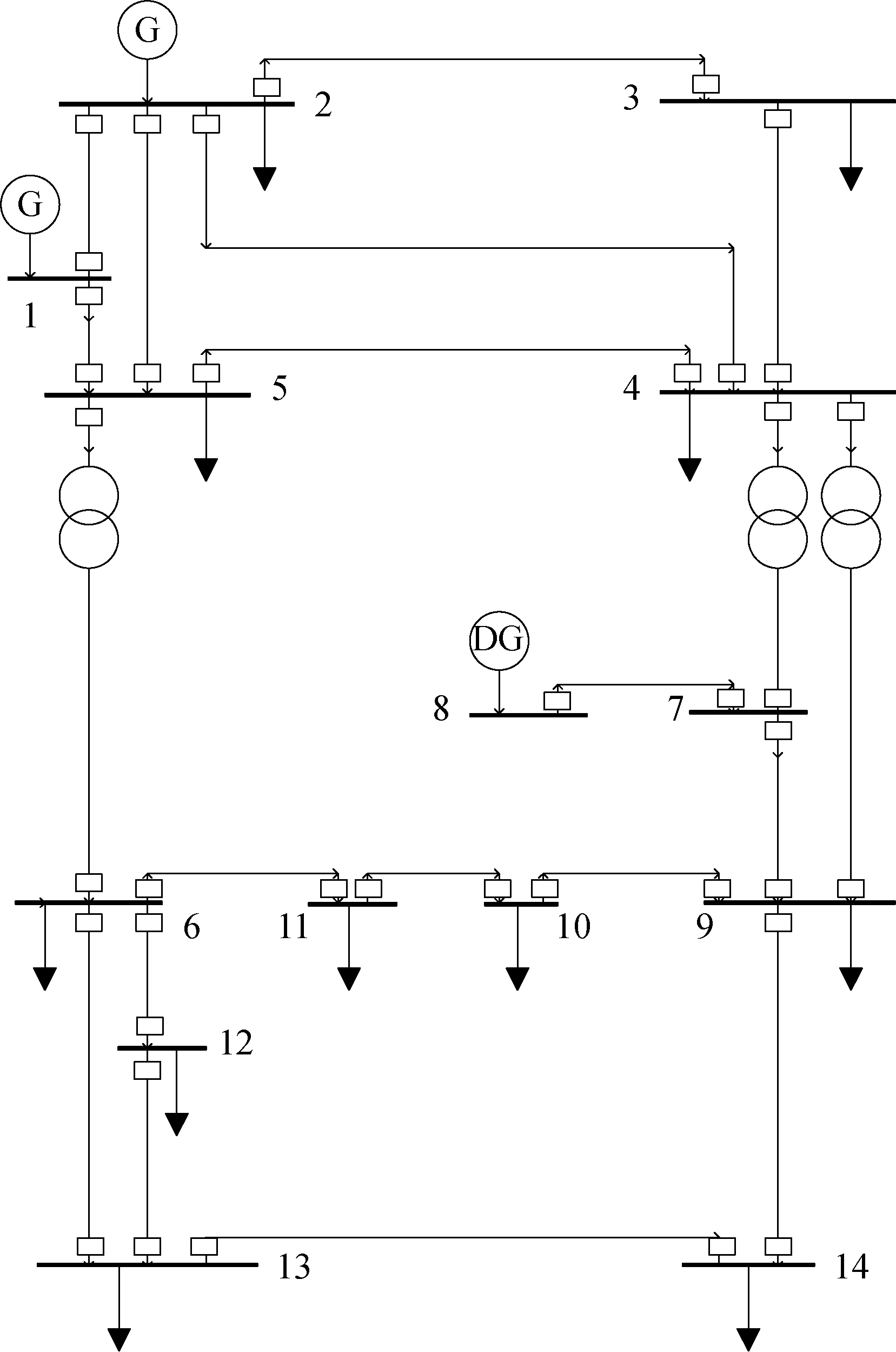
图6 IEEE-14总线系统
4个研究案例情况下的运行时间对比如表6所示.根据表6可以看出,案例3的运行时间(t=5.23 s)明显低于案例2的运行时间(t=6 200 s).将基于传统遗传算法的案例2与基于提出的线性规划算法的案例3进行对比,案例3的计算时间明显低于案例2的计算时间,证明了运行时间短是本文中提出的线性规划优化整定方法的主要优点.从表6中展示的继电器平均动作时间可以看出,通过采用本文中提出方法,系统中继电器的平均动作时间最短(t=0.271 s),同样证明了所提出的方法效果显著.

表6 4种案例的计算结果对比
4 结论
配电网中各类设备的暂态故障会导致流过继电器的故障电流随时间而变化.因此,过流继电器的反时限特性曲线无法准确计算继电器的动作时间.针对以上问题,提出了一种基于过流继电器动态模型的线性规划计算方法来计算继电器的动作时间.所提出的线性规划方法通过将继电器的动态模型转化为线性表达式,通过一系列的线性迭代计算以实现配电网络中过流继电器动作时间的优化整定计算.此外,还提出了一种组合算法,该方法将提出的线性规划计算方法与遗传算法相结合,以实现配电网络中过流继电器动作时间与启动电流的优化整定计算.
为了评估所提出的方法,研究了4种不同案例情况下的配电网继电器优化整定问题.仿真结果表明,本文中提出的线性规划计算方法相比于传统的遗传算法具有明显的计算速度优势.此外,仿真结果还显示本文中提出的组合方法计算出的配电网继电器平均动作时间最短,证明了该方法的有效性.
