基于无人机平台的运动多站无源定位技术研究
2023-07-13张辉崔勇强
张辉,崔勇强
(1.中船重工722研究所武汉迈力特通信有限公司, 湖北 武汉 430079;2.中南民族大学电子信息工程学院, 湖北 武汉 430074)
0 引言
无源定位技术自身不发射信号,只利用单个或多个接收站获取的信号定位辐射源,也被称为被动定位技术.传统的无源定位通常分两步实现[1]:第1步,接收机截获辐射源信号,并对原始采样信号进行处理,使用空间谱等方法[2-4]估计蕴含辐射源位置信息的定位参数;第2步,基于定位参数与辐射源位置之间的关系建立方程并求解,实现定位.2004年,Weiss等首次提出了直接定位(direct position determination,DPD)技术[5],DPD是一种单步定位算法,该算法同样利用两步定位中的信号却可以直接估计目标位置,而无需中间参数估计.在该定位技术中,利用多阵列观测站,将目标的角度信息融合在阵列流型中.同时,通过对接收数据进行离散傅里叶变换,将时延信息转换为相位,便于数据的处理.基于极大似然准则,分别在信号已知和未知状态下建立代价函数,初次实现了单目标的直接定位,在低信噪比下,DPD技术具有比两步定位更高的定位精度.
近年来,无人机(unmanned aerial vehicle, UAV)由于其灵活的移动性,基于此平台的辐射源定位技术成为了人们关注的焦点.无人机产业的迅猛发展在为人们提供诸多便利的同时,因为缺乏有效的管制措施,“黑飞”事件频频发生,无人机已然成为了城市治安新的威胁[6].传统民用无人机飞行高度低、飞行速度慢、目标小,难以被雷达快速探测并识别,但其功能强大,可以遥控进行拍照、窃听、投放和悬挂等操作[7],极易被不法分子所利用,对我国低空空域带来极大的安全隐患,同时对城市公共安全甚至国家安全构成威胁,其中机场、监狱、体育场馆、公共建筑和其他重点敏感区域成为无人机侵扰与袭击的重点对象[8].
针对此问题,开展基于无人机平台的辐射源定位算法研究显得十分迫切.无线电测向作为无线电监测中的一项重要技术,和基于到达时间(TOA)[9]、到达时间差(TDOA)[10-15]、到达频率差(FDOA)[16-18]的方法相比,不需要时间参数或频率同步[19],能实现远距离的多站协同定位.本研究采用基于时延和多普勒频率[20]的直接定位算法,协同处理多个接收站截获的信号,根据极大似然原理建立代价函数,直接通过确定目标函数的极值点来实现对目标位置的估计,不需要多普勒频率或频差估计等步骤.
1 信号模型
本文中仅考虑平面定位,且考虑到的信号为确定性信号.具体的实验场景如下,目标辐射源位于p=[x,y]T,L个速度已知的移动接收站截获目标的发射信号,并且各接收站的时频同步,每个接收站在其运动轨迹上对目标信号进行K次截获.用pi,k和vi,k(l=1,…,L,k=1,…,K)分别表示第l个接收站在第k个时隙中的位置和速度,同时假定接收站在每个时隙中的速度和位置均保持不变,则第l个接收站在第k个时隙中时刻的观测信号可以表示为:

(1)
fl,k=fc[1+μl,k(p)]
(2)
(3)

rl,k=[rl,k(t1),…,rl,k(tN)]T,
wl,k=[wl,k(t1),…,wl,k(tN)]T,
sk=[sk(t1),…,sk(tN)]T,
(4)
则式(1)的采样形式可以表示为:
rl,k=βl,kAl,kFl,ksk+wl,k
(5)
2 直接定位算法模型
在信号处理领域,参数估计是一个普遍存在的问题常见的问题.常用的参数估计方法有贝叶斯估计、极大似然估计、极大极小估计等,而DPD技术正是基于极大似然估计原理而提出的.利用极大似然原理对所有未知参数进行估计,由于wl,k是均值为零方差为σ2I的复高斯白噪声,则所有未知参量的极大似然函数为:
(6)
对式(6)取对数并忽略常数得到:
(7)
将式(7)对未知量噪声方差求偏导并令导数为零,即可求得噪声方差的极大似然估计值:
(8)
将式(8)代入式(7)中,可以得到以下的最小二乘估计模型:
(9)
假设,通过最小化式(9),便可得到信道衰减量的极大似然估计值为:

(10)
将式(10)代入式(9)中,有
(11)
(12)
定义以下N×N的Hermit矩阵:
(13)
(14)
(15)
目标位置的估计可以通过下式计算:
(16)
通过上述讨论可知,当信号波形未知时直接定位技术的大致步骤:
步骤0 将感兴趣的区域进行网格点划分,其数量为J,每一个网格点记pj.给定观测时隙数K,接收站数目L;
步骤1 令j= 1;
步骤2 令k= 1,令C2(pj)= 0;
步骤3 令l= 1;
步骤5 令l=l+1,若l≤L,转步骤4,否则,转步骤6;
步骤7 令k=k+1,若k≤K,转步骤3,否则,转步骤8;
步骤8 令j=j+1,若j≤J,转步骤2,否则,转步骤9;
步骤9 寻找C2的最大值,对应的网格点便是估计的目标位置.
3 仿真实验
本次仿真实验模拟两个无人机机载的移动接收站对一个静止目标辐射源进行定位的场景.其中,辐射源发射的是脉冲信号,带宽为3.3 MHz,载波为5.8 GHz,接收站的采样率为8.4 MHz,观测时隙数为10,信号波形如图1所示.

图1 信号波形
图2展示了目标辐射源和两个以60 m/s从左向右运动的接收站的位置分布,目标的位置坐标为(450 m, 300 m),两个无人机机载接收站的起始位置分别是(0 m, 0 m)和(200 m, 0 m).SNR取(-25:10:35)dB.在本仿真实验中,均方根误差(RMSE)由以下公式确定:
(17)
目标位置估计值的均方根误差如图3所示.同一种信号状态下,在低信噪比时,直接定位算法的性能明显优于两步定位算法,这是因为两步定位技术在估计中间参数的过程中引入了误差,而且忽略了不同接收站接收来自同一个目标发射信号之间的相关性;当信噪比较高时,噪声的影响减小,两步定位法对中间参数的估计更加精准,所以此时两种定位方法性能相当,都渐近逼近克拉美罗界(Cramer-Rao bound,CRB).同时,从图3可以看出,对于同一种定位技术而言,信号波形已知时可以充分利用目标发射信号的波形信息,定位精度高于信号未知时的情况.
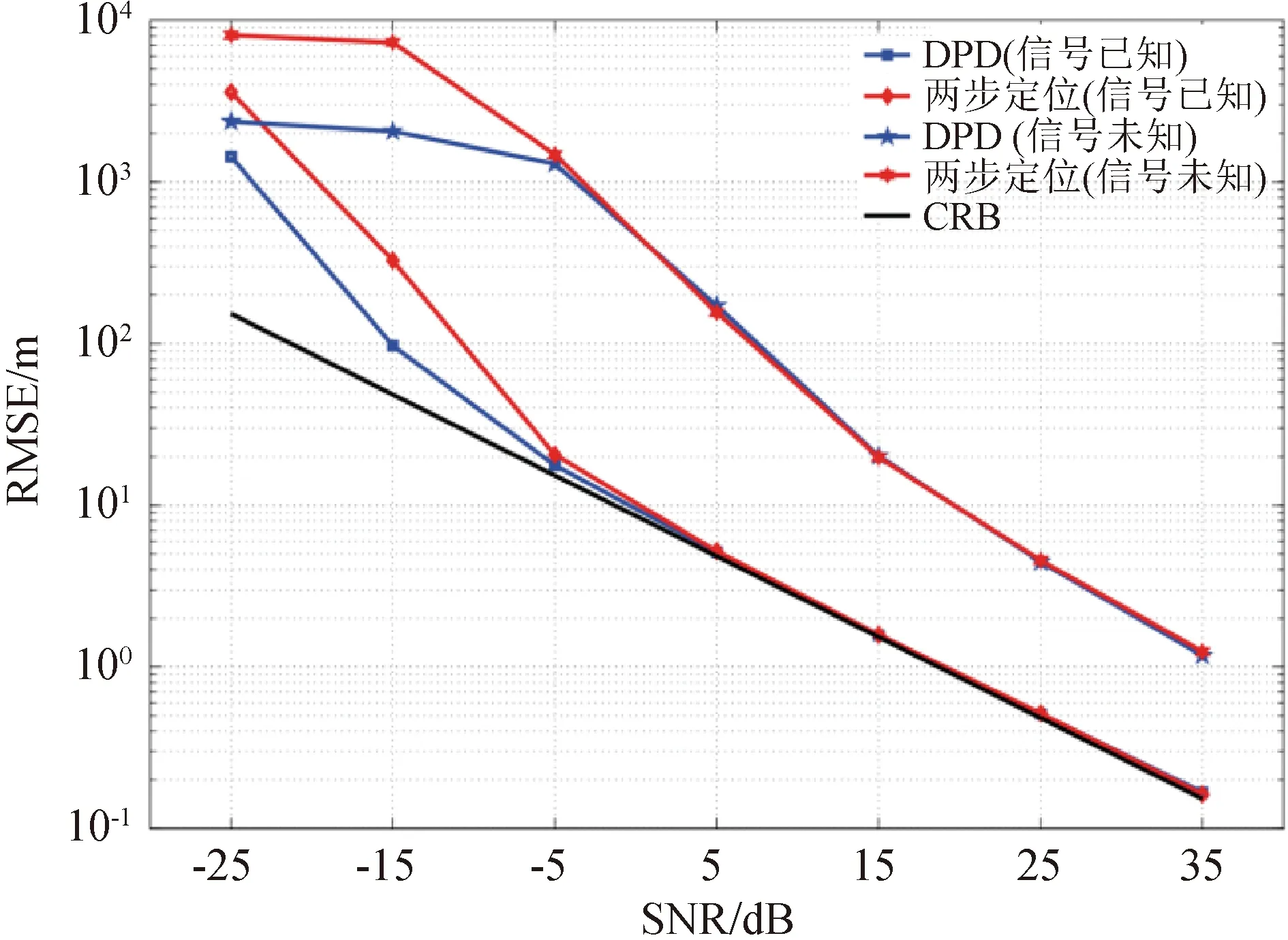
图3 目标和接收站几何位置分布图
4 结论
本文中对无人机机载的运动多站无源定位技术进行研究,采用了基于时延和多普勒频率的直接定位算法,协同处理多个无人机机载接收站截获的信号,根据极大似然原理建立代价函数,直接通过确定目标函数的极值点来实现对目标位置的估计,不需要多普勒频率或频差估计等步骤.主要通过利用多普勒频率与目标辐射源和接收站之间相对速度的非线性关系,基于多普勒频率的直接定位技术以多普勒频率为中间变量,直接通过数字信号处理以得到目标的位置,而无需对该频率值进行估计,进而避免了在估计过程中引入误差,提高了系统的抗噪性能.
