无人机火箭助推发射风险控制方法研究
2023-07-11张世慧袁培新董功锐崔丹
张世慧 袁培新 董功锐 崔丹


摘 要:本文针对某型无人机在起飞发射过程中存在的风险,对无人机起飞发射过程进行了分段处理,分析了各阶段姿态控制逻辑,对火箭助推发射的风险边界进行了研究论证,提出了无人机发射过程中调整火箭助推器的两种方法,能够有效提升无人机火箭助推发射的安全性,为该类无人机安全发射起飞提供理论依据。
关键词:无人机;火箭助推发射;姿态控制;方法研究
1 概述
无人机的起飞方式有很多种,归纳为零长发射起飞、弹射起飞、起落架滑跑起飞、载机空中发射起飞、容器式发射起飞、垂直起飞、投掷发射起飞等类型。比较通用也是比较成功的起飞方法之一是火箭助推发射起飞,火箭助推发射一般采用零长或短轨的发射方式,无人机安装在零长度发射装置上,在火箭助推器作用下飞离发射装置,无人机起飞后,抛掉助飞火箭,由飞机上的发动机完成飞行任务。
以某型无人机为例,该型无人机在实际使用中,由于发射场地周边环境复杂,有村庄和高压线等建筑物,无人机火箭助推发射起飞后,火箭助推器掉落地点不固定,人员和设备存在一定安全风险。为解决该型无人机在复杂环境下的起飞问题,本文从发射风险入手,分析研究了该型无人机火箭助推发射过程,提出了改进意见和注意事项,为火箭助推类无人机发射提供理论依据[1]。
2 无人机火箭助推发射的特点
无人机的起飞方式是反映作战灵活性的关键因素,在实际应用过程中发射阶段往往最容易发生问题。火箭助推发射作为零长发射的一种方式,不受地域环境的限制、机动性好、便捷快速、火箭助推发射存在时间短、无人机受力相对复杂、重心在瞬间移动大等特点[2]。
火箭助推无人机往往受多种因素的影响,火箭安装角度不合适,会出现推力线不通过无人机重心的问题,导致无人机在俯仰和横倾方向产生较大的作用力矩,造成无人机起飞时俯仰姿态或者横倾发生变化,影响无人机安全起飞性能,会造成发射阶段无人机失败问题,调整助推火箭的推力线对于保证起飞具有十分重要的意义。
在实际操作中,火箭助推发射时需要考虑的因素较多,主要为气动参数、控制系统参数、火箭安装参数等方面,如果这些参数选择不当,很容易导致发射过程的失败[2]。
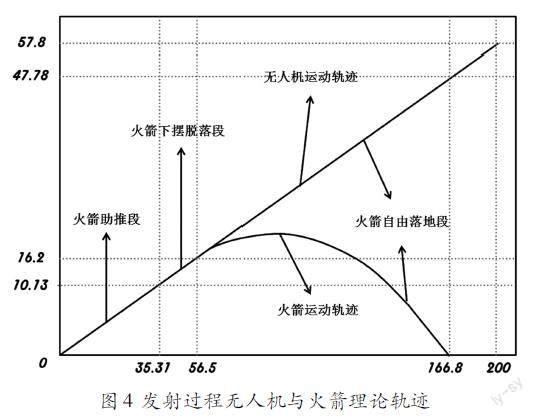
3 火箭助推过程
火箭助推过程可分为3个阶段:在轨滑行阶段、脱离发射架到助推结束阶段、助推火箭脱落阶段[3]。
3.1 在轨滑行阶段
在轨道滑行阶段,无人机受力主要有发动机推力、助推火箭推力、无人机重力、气动力、导轨的支撑力和摩擦力。该阶段无人机发射角与爬升姿态角一致,即机体横倾为0°,俯仰为±13°,且该阶段飞行速度较低,同时受导轨的约束,因此可以不考虑气动力。
3.2 火箭助推阶段
从火箭点燃到燃烧结束,火箭的燃烧时间大约为2s左右,当火箭脱落時无人机飞行的高度约80米,距离也相对较近,通过发射无人机的姿态分析,无人机起飞时发射角度与爬升时的姿态角基本一致,机体坐标轴与速度方向一致(迎角为零)。无人机离开发射架后,俯仰角开始变大,在飞行控制器的作用下,最终保持在一定的范围内,无人机的实际飞行数据与火箭助推发射阶段纵向姿态曲线基本一致。但是,无人机在发射阶段速度不是很高,所以想要确保无人机在发射阶段安全,必须在飞行前做好火箭助推器的安装和检查工作,确保推力线和安装角在中心位置。
3.3 火箭脱落阶段
火箭助推结束后,无人机速度完全由自身发动机推力保持,未完全达到最大速度,火箭此时跟随无人机一起做匀速运动。不同的是,火箭在重力的作用下向前下方摆动脱落,可简化为一物体在重力作用下绕定点下摆,分离时间非常短暂,火箭脱落时运动可以分解为沿接触点(助推火箭与无人机)的下移和转动。
4 火箭助推风险边界分析
一般来说,无人机重心会偏离设计推力线(比如无人机的发动机在火箭点火之前就已经启动,由于各个型号无人机的油箱位置、结构设计等不同,发动机启动后至无人机发射前一段时间的燃油消耗会导致无人机重心偏离设计推力线),助推火箭的推力会对无人机产生一个抬头力矩;发射过程中,火箭推力的重心在无人机重心的后下方,无人机发动机的推力会对无人机产生低头力矩;在火箭推力的作用下,无人机速度随之增加,升力也慢慢增大,无人机的重心点在组合体重心之前,气动力会对组合体产生一个抬头的力矩[4]。
火箭在离轨后俯仰角变化较大,这是由于在无人机离轨瞬间,导轨的作用力突然消失,由于惯性作用,无人机产生一定的抬头力矩。在2s时间内,助推火箭力矩大于发动机推力力矩,无人机俯仰角减少。3s后,在气动力矩与发动机推力力矩共同作用下,最终使无人机的俯仰角稳定在给定值。从速度、高度的变化来看,虽然发射阶段俯仰角变化较大,但由于无人机离轨时飞行速度很低,气动力矩作用可以忽略,舵面效率基本不存在,要确保无人机安全发射,必须在发射前调整好助推火箭的安装角[5]。
4.1 无人机发射过程必须引入俯仰控制
火箭助推发射过程中,无人机的初始速度主要由助推火箭产生,加入俯仰控制,可使无人机发射时以固定角度和方向爬升,当助推火箭脱落后,无人机在自身发动机的推力下沿纵向俯仰方向飞行,如果没有引入俯仰控制,会导致组合体重心发生移动,无人机受力发生变化,并且始终受到较大的火箭推力,致使整个过程无人机没有平衡点。无人机俯仰姿态变化较大,不利于发射安全,尤其俯仰力矩系统对俯仰角速度的导数较小时,则无人机的姿态变化将更加剧烈。如果火箭推力线在组合体重心上方通过,则常值力矩是低头力矩,无人机在助推发射过程中可能存在坠地风险。因此,必须在无人机的火箭助推发射过程中引入俯仰控制,以消除无人机由于存在重心测量误差、安装误差等造成的影响,确保发射安全[6]。
4.2 火箭助推发射无人机重心匹配问题
根据上述分析,无人机重心的位置是决定无人机纵向稳定性的重要参数,即使引入俯仰控制,无人机和助推火箭、助推火箭和发射架之间的缝隙也应当尽可能小。
当无人机重心位置固定时,必须满足推力线的延长线与无人机的实际重心之间距离在一定范围内才能保证发射安全。因此,在发射前需测量无人机的实际重心,保证助推火箭推力线通过组合体重心。
4.3 火箭助推发射无人机重心位置的调整
在空中飞行的无人机全机重心的前后位置允许变动的范围较小,重心位置的前限由滑跑起飞时把机头拉起的条件决定,重心的后限由无人机飞行时的安定条件决定,常说的重心位置是相对于机翼平均气动弦长的百分比来表示[7]。
某型无人机采用火箭助推的方式起飞,起飞前已经引入了俯仰控制,主要考虑的是安定性方面的要求。根据空气动力方面的计算,并且将平均空气动力弦简化折算到机翼根部弦长上去,某型无人机的重心位置在33%~35%机翼根弦。由于火箭发射起飞,要求推力线与重心之间有较严格的关系,因此上述范围应予以保证。
无人机出厂前重心位置已调整在上述重心位置,无须再进行调整,但飞机内的装载设备如有大的变动,则重心必须重新调整。其方法是根据力矩平衡原则按以下步骤调制要求位置:某型无人机以待飞状态安装,即各种设备全部安装到位,加满油,装好伞,发动机安装到位,机翼尾翼安装到位,在中翼上画好配重线,贴好刀口支撑板;配重时先将刀口对准中间一条线,看全机能否配平,否则移动刀口直到全机平衡;若刀口还在重心前后0.5mm范围内则无须另外配重,若超出此范围,可在头部或者尾部配重。
4.4 火箭推力线的测量
在无人机刚离开发射架时无人机的速度很低,机翼的升力很小,此时无人机的重量完全要由火箭推力的向上分力来负担。随后无人机的速度不断增加,机翼的升力逐渐增大,再加上火箭推力的向上分力,飞行轨迹势必向上弯曲,而且机头上仰角度也随之增大,这样的姿态容易造成无人机“失速”。因此,要使推力线有意的在重心上面通过,刚起飞时,造成一个低头力矩,使无人机略有低头,而在火箭助推的后期,不至于抬头过高。
5 调整火箭助推器的两种方法
火箭助推器起飞最大的优势就是起飞场地不受限制,可以在山地、河滩、丘陵等地形复杂的地方做到零长起飞,最大限度地提高了火箭助推无人机的机动性和展开时间[8]。
5.1 配重法
根据无人机的重心位置,使用钢板尺对机翼后缘进行测量,将重心位置调整到规定的范围值内,称重时必须保证油箱加满油,将回收伞装好,空速管安装到位。如果所测量重心不在规定范围内,则需使用铅块对其进行相应配重。如果无人机有轻微的抬头,基本可以忽略不计,但是必须保证无人机重心不变的情况下,不可以低头,确保重心不变。
5.2 推力线调整法
在已知无人机重心位置的情况下,根据某型无人机吊挂要求进行无人机满载吊挂,装好回收伞;加油时在前油箱顶部放置一块试验过的与飞行前油量相当容积的海绵,模拟无人机在外场飞行前发动机着车所消耗的油量;吊挂结束后再将吊挂时使用的海绵取出;最后再将油箱加满,使用吊挂器将无人机倒置吊起,推力线在吊挂筒正中间1mm左右范围,如不正确,需在相应的位置通过添加铜皮或者垫片进行调整,确保推力线重心位置。
综合上述研究分析,无人机火箭助推发射为确保发射安全,需注意以下四点:
(1)无人机在发射前调整好助推火箭的安装角(12°~15°可調)。
(2)为消除无人机可能存在的重心测量误差、安装误差,在无人机火箭助推发射过程中引入俯仰角控制。
(3)无人机出厂验收时,应充分关注和考虑重心问题,在装配时重视无人机的重心匹配。
(4)安装助推火箭时,用干毛巾清除飞机推力座与火箭上连接点的灰尘和油污,安装完毕后要反复测试助推火箭脱落情况。
结语
本文通过对某型无人机的发射过程进行分析研究,给出了分析结果,提出了安装火箭助推器的方法,为同类型的无人机操作使用提供了非常重要的参考资料,同样对于其他型号无人机发射阶段的安全分析,也具有一定的借鉴意义。
参考文献:
[1]董朝阳.无人机飞行与控制[M].北京:北京航空航天大学出版社,2020.
[2]李为吉.飞机总体设计[M].西安:西北工业大学出版社,2004.
[3]杨旭,王鹏基.无人机起飞段航迹控制方案设计与数学仿真[J].战术导弹技术,2004:4246.
[4]何庆,刘东升.无人机发射技术[J].飞航导弹,2010:2427.
[5]李东,荣辉.基于无人机数学模型仿真分析与研究[J].科学技术与工程,2008,8:15101535.
[6]田新峰,薛鹏,等.某无人机火箭助推发射研究[J].宇航计测技术,2012:3032.
[7]薛明旭.战术导弹发射动力学与仿真[D].西安:西北工业大学,2004.
[8]李浩,肖前贵.火箭助推无人机起飞发射段建模与仿真[J].东南大学学报,2010:136139.
作者简介:张世慧(1984— ),男,汉族,山西晋城人,本科,无人机技师,研究方向:无人机指挥控制。
