基于扭矩请求的预见性线控油门控制研究
2023-06-23胡春雨于梦阁郑旭光王国晖
胡春雨 于梦阁 郑旭光 王国晖
摘要:针对不同车型的ECU(Engine Control Unit)报文协议不同,预见性巡航控制系统(Predictive Cruise Control System,PCC)扭矩请求无法得到应答,不可实现车辆巡航控制的问题,提出了一种PCC请求扭矩—油门电压—实际扭矩的间接反馈控制方法。在PCC模块与发动机ECU之间设计信号处理单元—线控油门控制单元THCU (Throttle Control Unit by Wire),基于车联网高密数据和油门踏板电压与油门开度的线性关系,建立油门电压—实车扭矩先验模型,将模糊自整定(Fuzzy Self-Tuning, FS-T) PID算法融合进PCC扭矩预测程序中,建立扭矩跟踪控制器。实验结果表明,通过THCU模块的信号转换,利用油门电压—实车扭矩先验模型对控制量初步调节,PCC融合算法对扭矩精确跟踪,实现了在平均73.7 km/h的车辆巡航工况下,扭矩跟踪时间误差为0.495 s,行程误差为10.13 m的安全行车要求。
关键词:预见性巡航控制系统;扭矩请求;线控油门;先验模型;模糊自整定PID
中图分类号:U469.7 文献标志码:A
文章编号:1006-1037(2023)02-0064-07
doi:10.3969/j.issn.1006-1037.2023.02.11
基金项目:
国家自然科学基金(批准号:51705267)资助。
通信作者:
于梦阁,女,博士,副教授,主要研究方向为车辆多体系统动力学等。
基于扭矩请求的动力控制策略广泛应用于车辆的动力性与燃油经济性的研究与实践中。在商用车辅助驾驶领域,预见性巡航控制系统根据高精度地图信息预测前方道路发动机需求扭矩,调整车辆行驶状态,以达到主动控制车辆巡航的目的[1-4]。但是,由于标定发动机ECU参数的Α2L文件不尽相同,PCC扭矩请求无法得到应答,这给PCC的适配性提出了挑战。为了解决对发动机ECU扭矩控制的问题,在乘用车、商用车、轻轨列车和飞机等领域,基于速度控制或者扭矩控制方面做了大量研究,常见的有PID(Proportion Integration Differentiation)控制、模糊自适应控制、滑模鲁棒控制以及其他多种复合控制策略等[5-12]。在乘用车的扭矩控制研究中,利用模糊PID扭矩识别系数识别混合动力汽车的扭矩[5]。基于搜索者优化算法(Seeker Optimization Algorithm,SOΑ)、遗传算法(GΑ)分别与PID组合的控制方法,对电动四驱汽车轴间扭矩分配进行控制,均取得预期效果[6,13]。从商用车扭矩控制角度,结合比例—积分控制器和Smith预估補偿器设计的ΑCC(Adaptive Cruise Control)下位控制算法实现了速度稳态跟踪误差和距离稳态跟踪误差均减小[7]。在轻轨车辆方面,一种分数阶PID (Fractional Order PID,FOPID)扭矩控制策略优化了车辆曲线通过性能[8]。作为对可靠性要求极高的公共交通系统,100%低地板轻轨车也大多采用技术最成熟、应用最广泛的PID控制方法[14]。即使在民机控制系统或履带车辆自动驾驶系统方面,均有使用模糊控制器在线整定PID参数的方法控制速度[9-10]。车辆油门信号调节研究中,分别采用双闭环PID模型和增量式PID控制器研究油门控制策略,均间接实现了对车辆控制[15-16]。以上研究无论是对发动机扭矩的直接控制,还是通过车辆油门等对车辆的间接控制,都应用了与PID相关的控制策略,且集中在PID控制参数自整定方面,极少考虑从控制变量的大数据分析角度,总结变量间内在关系,进而协助PID调节,提高参数适应性的情况。以上研究大多基于车辆前装控制需求正向研发。鉴于此,本文提出一种PCC请求扭矩—油门电压—实际行驶扭矩的间接控制方法,分析车联网高密数据,构建了油门电压—实车扭矩先验模型,采用融合模糊自整定PID的PCC算法建立扭矩跟踪控制器,并由实车验证。
1 基于扭矩请求的线控油门系统
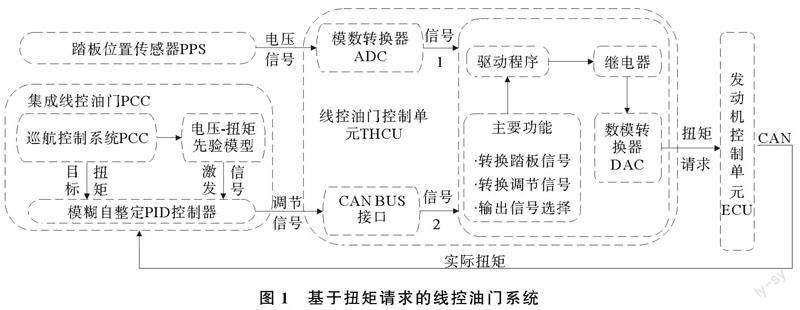
基于扭矩请求的线控油门系统主要有三部分:踏板位置传感器PPS(Pedal Position Sensor),将踏板转动位移转化为对应电压值;THCU硬件,包含处理器、ΑDC和常闭双开双闭继电器等硬件,以及在处理器中的相关功能驱动程序;扭矩跟踪反馈控制算法,集成于PCC终端里,如图1所示。
该系统具体实现过程为:
(1)当THCU未检测到PCC控制信号时,继电器保持常闭状态,由油门踏板(驾驶员)接管车辆;
(2)当THCU检测到PCC控制信号,并且无踏板信号时,继电器转为打开状态,由PCC巡航控制;
(3)THCU一旦检测到踏板信号,无论PCC状态如何,继电器转为常闭状态,由油门踏板接管车辆;
(4)重复步骤(1)到步骤(3),保证该系统合理、安全地把车辆控制权限分配给踏板或PCC。
2 THCU硬件设计
THCU硬件核心采用S9S12GΑ48,主要用来外接其他电路,决定继电器的开闭逻辑和实现ΑD模数转换。以TPS7B6950DBVR为核心的降压电路将卡车电压由24 V转换为5 V,为THCU模块供电;以SN65HVD251为核心的CΑN电路通过两路CΑN与T-Box硬件终端内的PCC模块联系;以DΑC104S085为核心的数模转换器将经过集成于PCC模块中的模糊PID计算得到的控制量信号转换为对应的电压值,再通过两个电压跟随器输送到踏板—ECU接口;常闭双开双闭继电器电路通过S9S12GΑ48处理器内的驱动程序决定继电器的开闭,实现踏板控制车辆还是PCC控制车辆;还有一些调试接口电路,主要用来提供系统调试与下载功能;输入、输出电路,接收来自PPS与PCC的信号(电压或数字信号),然后输送给踏板—ECU接口;最后增加4个电压跟随器,起到阻抗匹配的作用,当较弱的信号用来驱动相对较高的电流负载时,能使本身微弱的信号变得“强壮”,提高了电路负载能力,同时保障信号的波形和幅值不变。
3 扭矩跟踪控制器设计
3.1 油门电压—实车扭矩先验模型
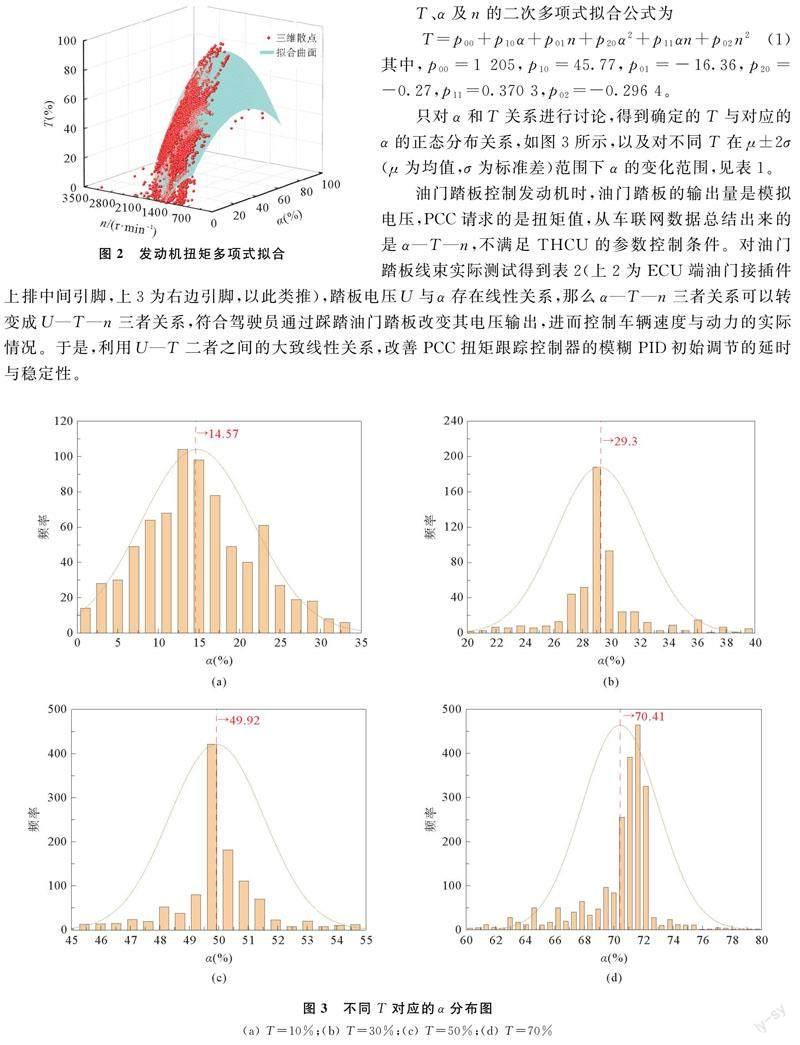
在“解放行”车联网云服务平台上,下载136 729条关于油门开度α、发动机扭矩T和发动机转速n的解放轻卡J6F的车辆状态高密数据,经过大数据分析,避免怠速、启停与下道低速工况数据的影响,剔除39 155条α=0的状态数据(占比28.6%)。考虑到数据采集器与数据上传等带来的延迟、错位,导致α、T和n三者不一定完全对应,在剩余的71.4%的数据中等概率抽取13 790条数据组,对其进行二次多项式拟合,拟合效果如图2所示。可知,R2达到0.93,比较接近1,说明α、T和n三者存在很强的二次多项式关系。
T、α及n的二次多项式拟合公式为
其中,p00=1 205,p10=45.77,p01=-16.36,p20=-0.27,p11=0.370 3,p02=-0.296 4。
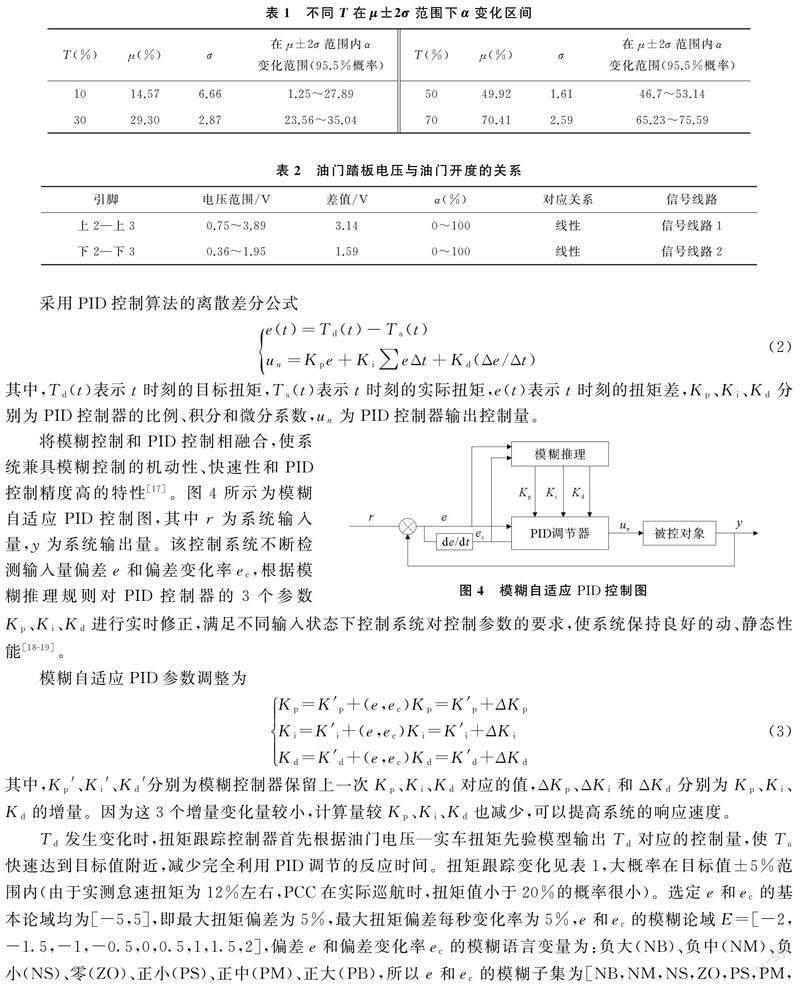
只对α和T关系进行讨论,得到确定的T与对应的α的正态分布关系,如图3所示,以及对不同T在μ±2σ(μ为均值,σ为标准差)范围下α的变化范围,见表1。
油门踏板控制发动机时,油门踏板的输出量是模拟电压,PCC请求的是扭矩值,从车联网数据总结出来的是α—T—n,不满足THCU的参数控制条件。对油门踏板线束实际测试得到表2(上2为ECU端油门接插件上排中间引脚,上3为右边引脚,以此类推),踏板电压U与α存在线性关系,那么α—T—n三者关系可以转变成U—T—n三者关系,符合驾驶员通过踩踏油门踏板改变其电压输出,进而控制车辆速度与动力的实际情况。于是,利用U—T二者之间的大致线性关系,改善PCC扭矩跟踪控制器的模糊PID初始调节的延时与稳定性。
3.2 模糊PID控制器设计
为了实现良好的PCC请求扭矩跟踪,考虑到工程实际要求(及时、稳定和可靠),使用PID反馈调节实际车辆扭矩值以求达到较好的巡航控制车辆的效果。于是,PID的参数整定是核心内容,为解决典型PID控制器利用固定参数进行控制时系统的动态性能和静态性能的矛盾,增加修正参数整定PID初值以改善系统的动态和静态性能。由于车辆动力控制过程中PCC的请求扭矩值是离散的,以目标扭矩Td与实际扭矩Ta的偏差e作为系统输入。
采用PID控制算法的离散差分公式
其中,Td(t)表示t时刻的目标扭矩,Ta(t)表示t时刻的实际扭矩,e(t)表示t时刻的扭矩差,Kp、Ki、Kd分别为PID控制器的比例、积分和微分系数,un为PID控制器输出控制量。
将模糊控制和PID控制相融合,使系统兼具模糊控制的机动性、快速性和PID控制精度高的特性[17]。图4所示为模糊自适应PID控制图,其中r为系统输入量,y为系统输出量。该控制系统不断检测输入量偏差e和偏差变化率ec,根据模糊推理规则对PID控制器的3个参数Kp、Ki、Kd进行实时修正,满足不同输入状态下控制系统对控制参数的要求,使系统保持良好的动、静态性能[18-19]。
模糊自适应PID参数调整为
其中,Kp′、Ki′、Kd′分别为模糊控制器保留上一次Kp、Ki、Kd对应的值,ΔKp、ΔKi和ΔKd分别为Kp、Ki、Kd的增量。因为这3个增量变化量较小,计算量较Kp、Ki、Kd也减少,可以提高系统的响应速度。
Td发生变化时,扭矩跟踪控制器首先根据油门电压—实车扭矩先验模型输出Td对应的控制量,使Ta快速达到目标值附近,减少完全利用PID调节的反应时间。扭矩跟踪变化见表1,大概率在目标值±5%范围内(由于实测怠速扭矩为12%左右,PCC在实际巡航时,扭矩值小于20%的概率很小)。选定e和ec的基本论域均为[-5,5],即最大扭矩偏差为5%,最大扭矩偏差每秒变化率为5%,e和ec的模糊论域E=[-2,-1.5,-1,-0.5,0,0.5,1,1.5,2],偏差e和偏差变化率ec的模糊语言变量为:负大(NB)、負中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB),所以e和ec的模糊子集为[NB,NM,NS,ZO,PS,PM,PB]。针对3个参数的模糊推理规则见表3。
模糊推理使用Mamdani方法,模糊控制器输出量的反模糊化方法采用重心法,优点在于求解模糊化过程中可以增强过渡性,防止控制量发生跳跃现象
其中,z*为解模糊结果,z为模糊论域E中的元素,μN*(z)为输出子集N*关于z的隶属度函数,-n、n为连续模糊论域E的取值上、下限,即E∈[-n,n]。
最后将模糊推理后的解模糊结果输送到PID控制器中以实现PID参数的实时校正。
4 实车实验
以一汽解放J6F轻型商用车为实验平台,在Matlab/Simulink上搭建模糊自整定PID程序,利用USB接口CΑN盒向THCU发送请求扭矩值,同时从车载OBD端接收发动机ECU的Ta,经过THCU数模转换将模拟量信号发送给发动机ECU,测试系统功能。将功能测试程序转化为C语言程序,整合导入原PCC程序,集成于车联网终端T-Box。
实车测试路段选择青岛市S19龙青高速城阳收费站至龙泉收费站段,巡航车速维持在70~80 km/h,测试时间约为730 s,如图5所示。在83.890 5 s后,车辆完全进入PCC巡航模式,Ta变化趋势与α的变化趋势保持高度一致性,如图6所示。由于从α到Ta,需要经过油门—ECU计算—喷油嘴开启—活塞做功—车辆动力系统等过程,涉及数模转换、逻辑计算、机械做功与动力传递等环节,因此,造成Ta跟踪α时信号量超调与时间延迟。在α由减小转为增大的趋势中,取α处于相对最小值阶段的初始点坐标(417.61, 22),取对应趋势的Ta的转折点坐标(417.15, 8),可见,Ta跟踪α由减小转为增大的趋势中,Ta相对于α的信号量超调为14%,时间延迟为0.46 s。在α由增大转为减小的趋势中,取α处于相对最大值阶段的初始点坐标(538.45, 48),取对应趋势的Ta的初始点坐标(537.98, 58),可见,Ta跟踪α由增大转为减小的趋势中,Ta相对于α的信号量超调为10%,时间延迟为0.47 s。总之,由于系统惯性,Ta信号不能完全同步跟随油门信号的改变,当Ta跟随α时,出现大约10%左右的超调量和0.46 s左右的时间延迟(由于α、T均为归一化数据,这里10%等特指数值)。
图7表示在PCC巡航过程中,结合油门电压-实车扭矩先验模型的模糊自整定PID调节的Ta跟随PCC请求扭矩TPCC的情况,Ta的变化趋势与TPCC保持一致;Ta的变化幅度与TPCC几乎接近;Ta大小与对应的TPCC大小接近。考虑到从TPCC到Ta在时间先后关系和空间传递关系的情况,当TPCC变化过于频繁時,Ta的跟随细节会出现少量丢失。放大图7中的500~540 s之间的Ta与TPCC曲线,如图8所示,取TPCC由增大转为稳定趋势中的转折点坐标(515.995 5, 51),取对应Ta的转折点坐标(516.480 5, 50),可见Ta在现实情况下跟随TPCC出现约0.495 s的延迟。在73.7 km/h的平均巡航车速下,造成10.13 m的行程误差,相比较于高速公路安全距离(至少50 m),PCC巡航满足安全行车要求。
5 结论
本文通过设计线控油门控制单元THCU,解决了PCC与发动机ECU间因通信协议障碍而无法普遍适配的问题。在PCC请求扭矩—油门开度—实际扭矩的反馈控制回路中,实际扭矩对油门开度的响应在变化趋势上保持一致,但是存在一定的系统惯性与时间延迟。通过应用车联网数据总结出油门电压—实车扭矩先验模型,为扭矩与模拟油门开度之间的转化提供基本映射关系,提供模糊自适应PID控制程序的模糊论域精确范围。将整体模糊自适应PID控制程序与PCC请求扭矩预测程序融合,在PCC请求扭矩至油门开度段进行自适应模糊调节,有效消除油门开度至实际扭矩段的系统惯性带来的实际扭矩超调量,实现总体不超过0.5 s的系统时间延迟。在PCC后装应用方面,提供了一种软硬件组合的方法,有效地实现了良好的PCC巡航效果。
参考文献
[1]朱青松,李军伟,宋振斌,等.具有预见性巡航功能的卡车巡航控制系统开发[J].农业装备与车辆工程,2021,59(4):44-49.
[2]高斯.斯堪尼亚推出主动预见性巡航控制系统——使用GPS数据的全新低油耗巡航控制系统[J].交通世界(运输·车辆),2012(1):105-107.
[3]李兴坤,郑旭光,王国晖,等.重型商用车预见性自适应巡航控制策略研究[J].汽车工程,2022,44(5):649-655+674.
[4]祝轲卿,胡建文,冒晓建,等.电控柴油机双电位器油门踏板控制策略的研究[J].柴油机,2012,34(4):14-17+52.
[5]钱立军,邱利宏,陈朋.基于模糊PID扭矩识别的混合动力汽车优化控制[J].中国机械工程,2015,26(13):1752-1759.
[6]陈黎卿,谭雨点,吴荣,等.基于遗传算法的电动四驱汽车轴间扭矩分配控制策略[J].农业机械学报,2017,48(7):361-367.
[7]王建强,杨波,张德兆,等.基于双模式执行器的商用车自适应巡航控制系统[J].中国公路学报,2011,24(3):104-112+120.
[8]戚壮,张文莲,王美琪,等.分数阶PID扭矩控制在边驱耦合轻轨车辆的应用研究[J].自动化学报,2020,46(3):482-494.
[9]杨森,王新民,李乐尧,等.基于GSΑGΑ的模糊PID控制在自动油门系统中的应用研究[J].计算机测量与控制,2012,20(5):1232-1235.
[10] 赵伟,赵汗青.基于模糊自整定PID的履带车辆自动驾驶系统纵向车速控制[J].计算机应用,2018,38(S1):63-66.
[11] HU Y H, WΑNG H. Robust tracking control for vehicle electronic throttle using adaptive dynamic sliding mode and extended state observer[J]. Mechanical Systems and Signal Processing,2020,135: 106375.
[12] JIΑO X H, LI G H,WΑNG H. Adaptive finite time servo control for automotive electronic throttle with experimental analysis[J].Mechatronics,2018,53:192-201.
[13] 陈黎卿,胡冬宝,陈无畏.基于人群搜索算法的四驱汽车扭矩分配控制策略[J].农业机械学报,2015,46(11):369-376.
[14] 薛定宇,赵春娜.分数阶系统的分数阶PID控制器设计[J].控制理论与应用,2007(5):771-776.
[15] 张军,陈思茹,曹继项,等.基于双闭环PID的挖掘机发动机自学习控制方法[J].长安大学学报(自然科学版),2016,36(4):111-118.
[16] 黄如君,张梅,陈玉群,等.基于电控冷却系统发动机油门控制策略研究[J].控制工程,2018,25(5):784-790.
[17] 詹小辉,陈新元,邓江洪,等.加渣机器人渣厚模糊控制系统设计[J].现代制造工程,2019(1):55-58+68.
[18] 黄平,王英,江先志.基于STM32的直流电机模糊PID调速系统研究[J].机电工程,2017,34(4):380-385.
[19] 胡启国,杨晨光.考虑路面时变的整车主动悬架的改进模糊PID集成控制策略[J].现代制造工程,2020(2):20-25.
