基于GPRS技术的北斗卫星定位算法研究
2023-06-07姚建群
姚建群,吴 洋
(1.中交基础设施养护集团有限公司,北京 100000;2.广州星绘大数据服务有限公司,广东 广州 510000)
0 引 言
在全球定位系统(Global Positing System,GPS)和俄罗斯全球卫星导航系统(Global Navigation Satellite System,GLONASS)取得巨大成功后,欧洲和中国分别建立了伽利略卫星导航系统和北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)。BDS是我国自主研发设计的全球卫星导航系统[1,2]。相较于其他卫星导航系统,BDS含有更多高轨卫星,抗遮挡能力更强,在低纬度地区其性能更为明显,也能提高服务精度,同时也融入了导航和通信能力。BDS对于国防安全和国防建设都具有重要的战略意义。该系统已经进入了逐步应用阶段,已经在农业、交通、军事、公共航海、石油、通信、防灾减灾、航空等领域都有广泛应用[3],并且正在逐步改变人们的生活方式。
同样的,在如今5G组网技术和应用需求不断提升的情况下,BDS仍然存在一些会降低其定位精度的问题,如卫星信号在产生和通信过程中因为北斗卫星接收机自身条件产生的误差和卫星信号在通过电离层、对流层等介质时受环境因素影响产生的折射、反射而出现的误差等[4]。因此,如何减弱甚至消除BDS中各种误差的影响是目前高精度实时动态定位系统中迫在眉睫的一项任务。
为改进卫星定位和通信服务能力,许多研究人员都提出了不同的改进方案。王均晖、孙蕊针对城市无人机定位应用中卫星信号受干扰严重而降低卫星定位导航精度的问题,提出一种基于“m”字形伪距残差的GPS/北斗组合伪距定位算法,将定位精度控制在2 m以内[5]。Wang、Qiu等人提出一种基于物联网和边缘计算的差分定位方法,在降低整个边缘网络的服务延迟时同样具有较好的定位功能,可为大型物联网提供实时定位服务[6]。杨柯等人提出一种基于伪距特征误差模型的伪距单点定位加权算法,有效提高了高程精度[7]。Wei等人提出北斗卫星导航系统和全球移动通信系统想结合的车辆定位跟踪远程监控系统,该系统利用多个可获取的卫星导航系统和移动网络实现车辆位置的精确跟踪[8]。
针对常规多点定位方法中存在的定位时间长、精度低、效果无法达到预期等问题,提出一种基于移动通信技术的卫星定位方法,利用RTK数学模型计算伪距,修正多路径误差和相对误差,以达到改进北斗卫星定位精度的目的。
1 卫星定位技术原理及改进
1.1 卫星定位技术原理
尽管BDS在星座卫星在接收信号过程中,受到卫星钟差与接收机钟差之间的同步误差以及其他不可控因素的影响,使得接收机很难测出真实的距离。从而得到叠加了许多误差的卫星和接收机之间距离的测量值,这个测量值被称为“伪距”,卫星单点定位原理如图1所示,BDS由多个导航卫星、用户接收机设备以及地面测量、控制网路等组成,导航和通信卫星即是空间位置的参考点,又是通信的中继站。在实际应用过程中,单个接收机可以同时接收多个导航卫星的信号,在数据经过相关算法处理后,可以获得更准确的导航定位信息,并利用接收机得到含有未知数的伪距方程。其中,未知数包含用户的空间坐标(X,Y,Z)以及接收机的时间误差,因此,伪距定位实际上是通过多个卫星与一个接收机之间的伪距来获得接收机的地球坐标系和接收机钟差[9]。
图1 卫星单点定位原理图
理论上,假设用户的空间坐标为(X,Y,Z)而在BDS中卫星的坐标为(Xs,Ys,Zx),用户与第i个卫星之间的距离为Dsi,则
(1)
然而,通过卫星定位理论可知,伪距与真实距离之间存在偏差,我们将伪距用Psi表示,则有
Psi=Dsi+c△tr
(2)
式中:c为光速,△tr为接收机钟差。在式(1)(2)中,共有X,Y,Z和△tr共四个未知数,因此,为了能够解算出未知数,接收机需要至少接收到四颗卫星的定位信号。在至少收到4个卫星的定位信息的情况下,接收机的坐标信息和钟差可以通过最小二乘方法进行解算。
通过n(n≥4)个卫星定位方程组合成的方程组如(3)式所示
(3)
式中:δE=c△tr,由于使用最小二乘方法进行求解的前提是方程组为线性方程,但是卫星导航系统是非线性的,因此需要对(3)式进行线性化变换,将上式用泰勒级数展开并线性化,得到
(4)
Ps=BU
(5)
其中,Ps=[Ps1Ps2…Psn]T,U=[ΔXΔYΔZΔδE]T,B为系数矩阵,具体为
(6)
另外,受到卫星信号传播中的大气传播延迟效应和多路径效应的影响,在伪距定位过程中卫星相较于接收机的仰角越低,其观测噪声向量使用最小二乘方法进行定位解算时,其定位精度也会有一定的减小。因此,考虑到卫星仰角对于定位精度的影响,使用文献[10]中提出的加权最小二乘方法。
1.2 卫星定位数据采集
利用导航定位数据从北斗卫星导航定位系统接收到的数据中提取有用信息,然后通过无线模块将信息发送到通信网络[11]。目前主要有GSM、GPRS、CDMA无线通信方式。其中,GSM通信较为常用,它在全球使用多个频段。能够为用户提供市场上最广泛的移动服务和移动终端选择。整个GSM技术的规模经济效应基于它拥有众多的生产商和服务供应商。由于这个技术采用开放标准,它能够保障移动运营商的投资安全,并提供成功过渡到未来移动网络技术的途径。但同时GSM在传播速率、信息时延、覆盖范围等方面都存在缺陷,容易产生通信盲区[12]。而CDMA网络传输速度快,获取信息也更加方便,但同时CDMA网络也伴有接受范围小的缺陷。因此,综合考虑传输速率、频率利用率、网络时延、覆盖范围等因素,本研究选择GPRS网络作为主要通信平台。
GSM技术是一个得到广泛验证的标准。由于GSM技术能够提供向EDGE和WCDMA过渡的安全途径,它能够提供未来的服务并吸引新用户,并保持在移动通信标准中的主流地位。GPRS(通用数据分组服务)技术实现了在移动网络中应用基于IP的服务。这个技术根据需求,不再需要通过MODEM拔号连接过程,就可以即时实现网络连接,发送和接收需要的信息。这就是使用GPRS的用户能够永远在线的原因。基于GPRS的北斗卫星定位终端充分利用了GPRS支持IP协议、可以接入外部数据网络的特点。现在,北斗卫星定位终端主要采用短消息通信方式,利用GPRS实时在线的特点,与GSM相比,其性价比更高。因此,应用GPRS数据通信来完成定位信息的采集和传输。数字 从而降低每个用户的服务成本。
2 实验结果分析
为验证基于GPRS的北斗卫星定位算法的定位效果,进行了仿真。选取常规的GPS定位、北斗定位算法和文献[6]提到的基于物联网和边缘计算的北斗差分定位方法进行对比。
基于虚拟仿真实验平台,对平台的硬件电路和软件程序进行了调试。在调试的过程中,我们需要用到一些比较常用的软件开发调试工具。我们采用QT用户界面设计、开发和调试软件。
2.1 单点定位与多点定位的比较
利用位置和环境参数,我们分别比较了所提出的方法、基于物联网和边缘计算的北斗差分定位方法以及常规GPS、北斗定位算法的单点定位和多点定位结果。以1 s的采集速度采集定位目标的经纬度坐标,并以图形格式表示。三种方法的单点和多点定位结果分别如图2和图3所示。
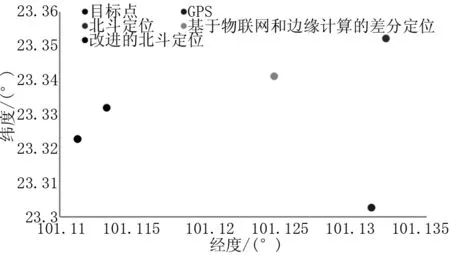
图2 单点定位结果

图3 多点定位结果
由图2和图3可知,在使用上述方法定位目标点时,无论是单点目标还是多点目标,定位结果都与目标点接近,相似度高。采用基于物联网和边缘计算的北斗差分定位方法以及常规GPS、北斗定位算法金鼎定位时,定位结果与目标点存在一定的偏差。表明该方法不仅能正确定位单点目标,而且能准确定位多点目标。
2.2 定位精度对比
为进一步验证所提方法的定位精度,选取10°~160°W和10°~80°N区间内的25个观测点作为实例,采用不同的方法进行定位,平均偏差被用作评价标准。我们计算了不同方法在观测点的定位结果,并使用均值偏差计算了不同方法的定位结果的平均值,结果如表1所示。
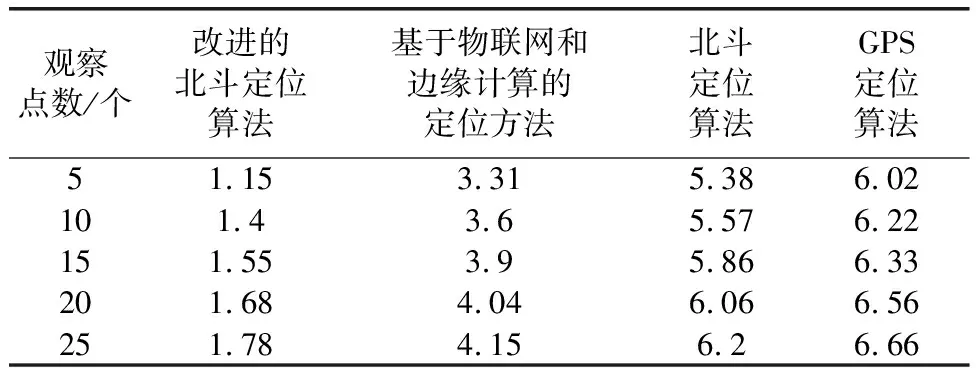
表1 不同方法定位的平均偏差
其中平均偏差值越大,定位精度越低;反之,定位精度越高。分析表1中的数据表明,与基于物联网和边缘计算的北斗差分定位方法和卫星定位相比,改进的北斗定位是方法的平均偏差值较低,且平均偏差均小于其他各方法的偏差值。表明所提方法的定位结果更加准确,可以获得可靠的北斗卫星定位结果。
3 结 论
针对传统方法存在的多点定位效果差、定位时间长、定位精度低等问题,提出了一种基于GPRS技术的北斗卫星定位算法。利用北斗卫星导航系统,将导航定位信息通过无线模块发送到通信网络。采用实时运动学(RTK)数学模型校正误差,然后计算伪距进一步消除相对论和多径误差。基于误差最小化的结果,改进了北斗卫星定位算法,修正了定位误差。实验结果表明,所提方法可以实现单点和多点目标的准确定位。结果证实该方法是有效的,具有一定的实际意义。
