基于扰动补偿的多轴车辆主动悬架自适应模糊动态滑模控制策略研究
2023-01-18陈肇群朱学斌
陈肇群,朱学斌,张 生
(北京航天发射技术研究所,北京 100076)
多轴车辆是军民两用的特种机动平台,在工程运输、应急救援、武器装备贮运及机动发射等领域具备不可替代的地位和作用,行驶平顺性是评价多轴车辆性能的一项重要指标,而悬架的功能特性是至关重要的影响因素之一.上世纪八十年代,主动悬架的出现为车辆行驶性能的升级提供了更多技术途径,相应控制策略的设计开发也逐渐成为该领域的研究热点.近年来,滑模变结构控制策略由于对系统模型线性化的依赖度较低,可自行设计滑模面且与被控对象及扰动无关的特征,使其具有响应速度快,无需在线辨识,物理实现简单的一系列优点,在悬架主动控制研究中的应用也逐渐增多[1-3].在传统滑模控制中,切换函数只与系统状态有关,控制律中的不连续项直接作用于对象输出,导致系统频繁切换控制逻辑,存在引发控制输出高频抖振的缺点.为弥补传统方法弊端,动态滑模控制策略通过将控制律中的不连续项转移至控制输出的一阶或高阶导数项抑制抖振,国内外诸多学者将其在悬架控制问题中的应用研究证明了该方法的有效性[4-5].而为进一步应对切换增益中存在的干扰项问题,部分研究人员尝试在滑模控制项中加入干扰补偿以更好抵消系统外部扰动和未建模动态[6],并在诸多复杂机电系统控制问题中得到成功应用[7-8].
基于上述研究,文中针对某型具有参数不确定性和外部干扰特点的六轴车辆主动悬架系统,考虑到车身垂向、俯仰两自由度振动对平顺性的影响最为显著[9],以整车垂向加速度、俯仰角加速度作为平顺性控制优化目标,采用动态滑模控制策略设计控制器,使之跟踪自适应理想天棚阻尼参考模型.为改善控制性能,设计扰动观测器,实时观测外部干扰和参数变化,在动态滑模主动悬架控制律中添加扰动补偿,利用模糊调节切换项增益方法进一步优化.最后利用MATLAB/SIMULINK软件进行仿真实验分析,验证控制算法的有效性.
1 多轴车辆主动悬架系统动力学模型
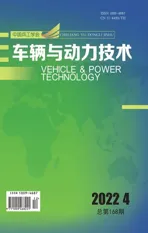
多轴车辆作为复杂的振动系统,在振动分析的建模过程中,要根据所分析问题对研究对象进行简化并建立相应数学模型,考虑多轴车辆的对称性并忽略前后车辙的不平度差异和较小的轮胎阻尼进行模型构建,由于该型多轴车辆油气主动悬架系统的单侧一~二桥及三~六桥油气弹簧连通,根据轴荷相近原则,将一~二桥简化为前桥,三~六桥简化为后桥,所建立的多轴车辆四自由度振动模型如图1所示.
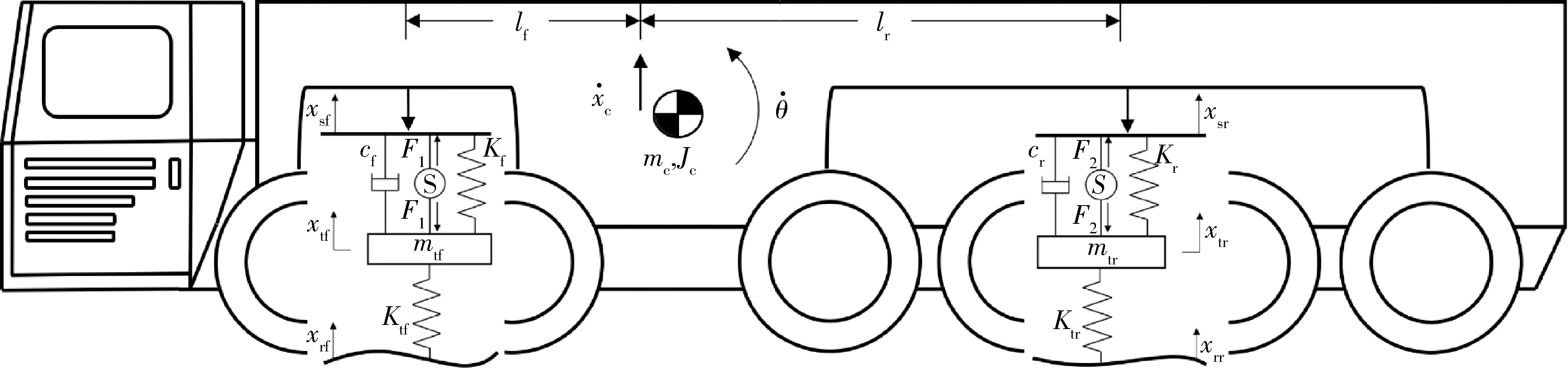
图1 1/2多轴车辆主动悬架系统动力学模型
图中,mc表示半车簧上质量;Jc表示半车转动惯量;mtf、mtr分别表示前、后桥簧下质量;lf、lr分别为簧载质量质心与等效前后轴的距离;表示车身俯仰角度;xc为车身垂向位移;利用xsf、xsr表示前后悬架上支耳与车身底板端面连接处位移;xtf、xtr为多轴车辆前后轴非簧载质量垂向位移;xrf、xrr表示多轴车辆前后轴簧下质量垂向位移;Cf、Cr为前后悬架阻尼系数;Kf、Kr为前后悬架弹簧刚度;Ktf、Ktr为前后轮胎等效刚度;F1、F2则分别为前后主动悬架作动器输出主动力.
根据车辆系统动力学理论,可推导出悬架系统动力学方程.
(1)
(2)
(3)
2 随机路面功率谱激励模型
通常将路面不平度函数定义为路面相对于基准面高度在道路延伸方向上的变化函数,当把车辆近似为线性系统时,可利用路面不平度及整车频域响应函数求出其功率谱,分析评价车辆行驶平顺性及车辆振动系统参数的影响.路面激励是引起车身垂向振动的关键输入,常见的建模方法包括滤波白噪声法、谐波叠加法、逆傅里叶变换等[10].文中采取简易高效的滤波白噪声模拟法,根据路面激励输入的统计特性和标准文件[11],采用路面空间功率谱密度函数对其进行描述.
(4)
式中:n0为参考空间频率;Gq(n0)为路面不平度系数;n为空间频率,表征单位距离包含的波长数量;ω为频率指数.
通常以功率谱密度为指标,将路面划分为A至H八个等级,由于车辆振动是动态过程,其功率谱密度与车速u耦合,进一步将空间功率谱密度Gq(n)与时间功率谱密度Gq(f)关联,时间频率f可表示为空间频率与车速的乘积,结合式(4)得到时频功率谱密度函数Gq(f)表达式为
(5)
以高斯白噪声模拟路面输入,圆频率表示的功率谱密度计算表达式为

(6)
式中:H(jω)为路面激励系统频响函数;GW(ω)为高斯白噪声功率谱密度,取值1/2π.
可得到该积分白噪声下的路面时域模型为
(7)
因低频段路面谱近似水平,为滤除干扰引入空间下截止频率f0进行时域模型修正,将车速代入换算,最终对应的时域空间路面激励输入的表达式为
(8)
考虑到同一路面区域下,车辆同侧轮间激励输入具有时滞相关性,前后轮路面激励耦合关系可描述为
(9)
在匀速工况下,仿真生成的滤波白噪声随机路高曲线如图2所示.

图2 前后轮所受路面激励输入
3 主动悬架控制器设计
在前节所搭建的1/2多轴车辆动力学模型及路面激励模型基础之上,进行主动悬架自适应动态滑模控制算法的开发,使被控对象实现对自适应理想参考模型的精确跟踪,并利用扰动观测器和模糊切换增益调节方法对控制策略进行优化,以提升整车平顺性能,更好的应对系统参数的不确定性和外部干扰.
3.1 自适应理想天棚阻尼参考模型
天棚阻尼控制策略最初在1974年由D.karnopp教授提出,理想的天棚阻尼方法作为一种简单高效的状态判定控制策略,直接作用于车辆簧载质量独立坐标的绝对速度,其基本思想是在簧载质量与天棚间加入阻尼装置,通过设置合适的阻尼系数实现对车辆的振动抑制,改善车辆在行驶过程中的平顺性.虽然在实际的物理系统中并不存在一种虚拟的惯性坐标用来安装减振器,但这并不影响由于该方法优秀的鲁棒性和有效性而被广泛应用于控制系统中参考模型的设计.多轴车辆垂向运动及俯仰运动理想天棚阻尼控制原理如图3所示.
Cv和Cp分别表示垂向及俯仰天棚阻尼系数,参考模型的动力学方程可以分别表示为

(10)
由于设计滑模控制器的根本目的在于对参考模型的完美跟踪,这使得参考模型的性能对控制效果起到决定性作用.系统的输出通常受到输入条件的时变影响,但采用固定参数的理想天棚阻尼控制器并不能很好的适应复杂的道路条件变化.为改善参考模型的全局性能,将模糊控制方法与理想天棚阻尼控制方法相结合,实现参考模型中阻尼参数的自适应调节,分别设计垂向天棚阻尼模糊控制器及俯仰天棚阻尼模糊控制器.为保证控制调节的时效性,以车身质心垂向振动速度、垂向振动加速度、俯仰角速度、俯仰角加速度作为模糊控制器的误差及误差变化率输入参数,输出作用于天棚阻尼控制器的阻尼系数.在模糊控制输入项和输出项的模糊集合论域内定义5个模糊子集:{NB(负大),NS(负小),ZE(零),PS(正小),PB(正大)}.采用输出上限为1、输出下限为0的非线性高斯隶属度函数,应用Mandani法和重心法进行模糊推理和解模糊,设计模糊规则的标准是使车身俯仰角加速度及车身垂向振动加速度最小,并确保悬架动挠度和轮胎动载荷在约束范围内,模糊规则如表1所示.

图3 天棚阻尼悬架控制系统示意图
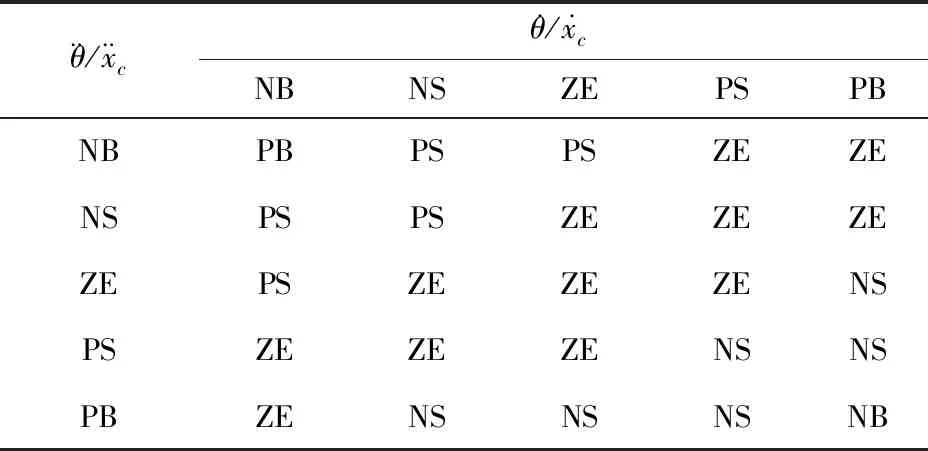
表1 天棚阻尼参考模型模糊控制规则表
3.2 动态滑模控制器设计
动态滑模控制方法针对传统滑模控制中的切换函数进行改造,使用函数的一阶或高阶形式,将传统滑模的不连续性隐含在新的切换函数中,因此,动态滑模控制能够在控制时域内输出连续,从而有效缓解高频抖振现象.引入参考期望车身垂向位移xcr和参考期望俯仰角θr,以车身垂向位移及其积分项、车身俯仰角及其积分项为控制目标,分别定义跟踪误差向量为
(11)
设置滑模切换面比例系数矩阵cθ及cx,将常规滑模面定义为
(12)
进一步构建动态滑模面:
(13)
将动态滑模面进行微分,结合式(11)、(12)及(13):

(14)
基于上式利用极点配置法确定常数矩阵c和参数λ,滑模运动方程的特征根应满足二阶系统欠阻尼情况,选取cx1=cθ1=1,cx2=cθ2=15,λθ=λx=10,利用式(1)、(14)消去高阶导数项可得:

(15)
为保证滑模运动成立,令式(15)中的σ项为0,得到滑模控制器等效项:

(16)
应用等速趋近律方法使动态滑模面可达,选择饱合函数替代符号函数,利用积分操作柔化切换过程:
(17)
得到所需的垂向振动主动控制力及俯仰振动主动控制力:
(18)
其中εx(t)>0、εθ(t)>0,在完成滑模控制律设计后需要利用Lypunov稳定性定理进行稳定性分析,分别定义两个Lypunov函数为
(19)
可得到:
(20)
将式(15)至(18)代入式(20)可推导得出:
(21)
上式证明所设计动态滑模控制律满足滑动模态的可达性条件,可渐近趋近于滑模面.由于车辆振动可近似分解为车身沿垂直方向的平动和绕质心转动的合成运动.当车身仅作平动时,可设车辆前后悬架系统力发生器的作用力相等,当车身作绕质心的俯仰运动时,为抑制惯性力矩,减小俯仰振幅,前悬主动力做动器与后悬主动力作动器受力方向相反,设前悬力发生器作用的推力矩与后悬力发生器作用的拉力矩相等,则车辆前悬主动控制力F1及车辆后悬主动控制力F2可表示为
(22)
3.3 扰动观测器设计
主动悬架系统在多轴车辆行驶过程中所受干扰可主要分为外界环境干扰及系统内部参数的不确定性干扰,前节动态滑模控制器的设计中并未考虑系统所受干扰项的影响,因此为预防控制抖振产生,实际控制律中增益系数的整定应参考干扰项上界.引入未知干扰项P(t),1/2多轴车辆主动悬架系统可被描述为

(23)
动态滑模面的微分表达式变化为
(24)

(25)
为确保式(21)依旧成立,扰动观测器设计应保证扰动观测估计误差在有限时间内收敛为0[12],同样利用李雅普诺夫稳定性理论,可得出观测器设计必要条件:
(26)
引入时变函数fx(t)、fθ(t),常数dx、dθ,设计扰动估计表达式为
(27)
结合式(27),对式(25)等号两侧求导:

(28)
为抵消式(28)中饱和函数项,将误差估计项时变函数设计为
(29)
由上式及式(28)可得:
(30)
则
(31)
考虑到系统扰动及其变化率有界,只需将dx、dθ设置为足够大的正常数,设定李雅普诺夫函数为
(32)
易证:
(33)
上式结果表明,扰动误差状态变量将在有限时间内收敛至零点,进一步结合式(29)及式(27),最终完成设计的扰动观测器表达式可整理为
(34)
3.4 模糊增益切换调节设计
考虑到在实际行车过程中的复杂工况下,利用扰动观测器观测得到的外部干扰和参数不确定性幅值可能难以快速收敛,在收敛过程中仍需选择合适的切换增益,防止产生高频抖振,保持对参考模型的跟踪性能.从控制机理进行分析,不难发现,当滑模面趋近于零时,影响系统穿越滑模面的速率和幅值主要因素是增益系数的大小,因此,可利用模糊控制方法设定模糊规则表,当滑模面趋近于零时减小增益系数;当滑模面绝对值较大时,通过增大增益系数使系统加速穿越滑模面,从而减缓乃至消除扰动观测器收敛过程中的不利影响.选取动态滑模面及其变化率作为模糊控制器的输入变量,εx(t)、εθ(t)作为输出变量,分别进行模糊增益切换调节控制器设计.将输入项模糊集合定义为:{NB(负大),NS(负小),ZE(零),PS(正小),PB(正大)};输出项模糊集合定义为:{NB(负大),NM(负中),NS(负小),ZE(零),PS(正小),PM(正中),PB(正大)},隶属度函数设定为高斯型,模糊推理采用Mandani法,解模糊采用重心法,模糊规则表如表2所示.

表2 模糊增益控制规则表
4 控制策略仿真分析
利用MATLAB/SIMULINK将前文所设计控制器及1/2多轴车辆主动悬架系统动力学模型进行搭建,分别进行俯仰振动控制器及垂向振动控制器仿真,采样频率设置为1 024 Hz,整体控制系统逻辑如图4所示.

图4 整体控制系统逻辑框图
为验证参考模型性能,分别在不同路面等级激励输入及不同车速工况下进行无主动控制作用(Uncontrol(UC)),传统理想天棚阻尼控制方法(Ideal Sky-Hook(IDSH))及自适应理想天棚阻尼控制方法(Adaptive Idea Sky-Hook(AIDSH))仿真,将多轴车辆车身垂向加速度及俯仰角加速度情况进行对比分析.选择A、B、C 3个路面等级工况及50 km/h、30 km/h两个车辆行驶速度工况,经过仿真得到的车辆平顺性性能评价指标在UC、IDSH及AIDSH参考模型下的均方根值如表3所示.

表3 不同参考模型性能对比
由表3数据可知,自适应理想天棚阻尼参考模型相对于传统理想天棚阻尼模型能够更好的应对路面条件及车速工况变化,其相对于被动悬架性能提升35%以上,相对于传统模型性能提升15%以上.进一步验证文中所设计控制策略对多轴车辆主动悬架被控对象系统的作用效果,将自适应天棚阻尼理想参考模型、传统PID控制器和应用扰动观测器的模糊动态滑模控制策略(Fuzzy Dynamic Sliding Mode Control Based on Disturbance Observer(DOFD-SMC))进行横向对比.仿真中选择B级路面,车速为30 km/h,其中DOFD-SMC算法对参考模型的跟踪效果与无控制器作用下多轴车辆被动悬架簧载质量垂向加速度、俯仰角加速度对比如图5~6所示,DOFD-SMC及传统PID控制作用下的簧载质量垂向加速度、俯仰角加速度对比情况如图7~8所示.应用同样仿真工况,车辆轮胎动载荷在不同控制策略下的时域特性对比如图9所示.

图5 DOFD-SMC与无控制下的车身垂向加速度

图6 DOFD-SMC与无控制下的车身俯仰角加速度
图7 DOFD-SMC与PID控制下的车身垂向加速度
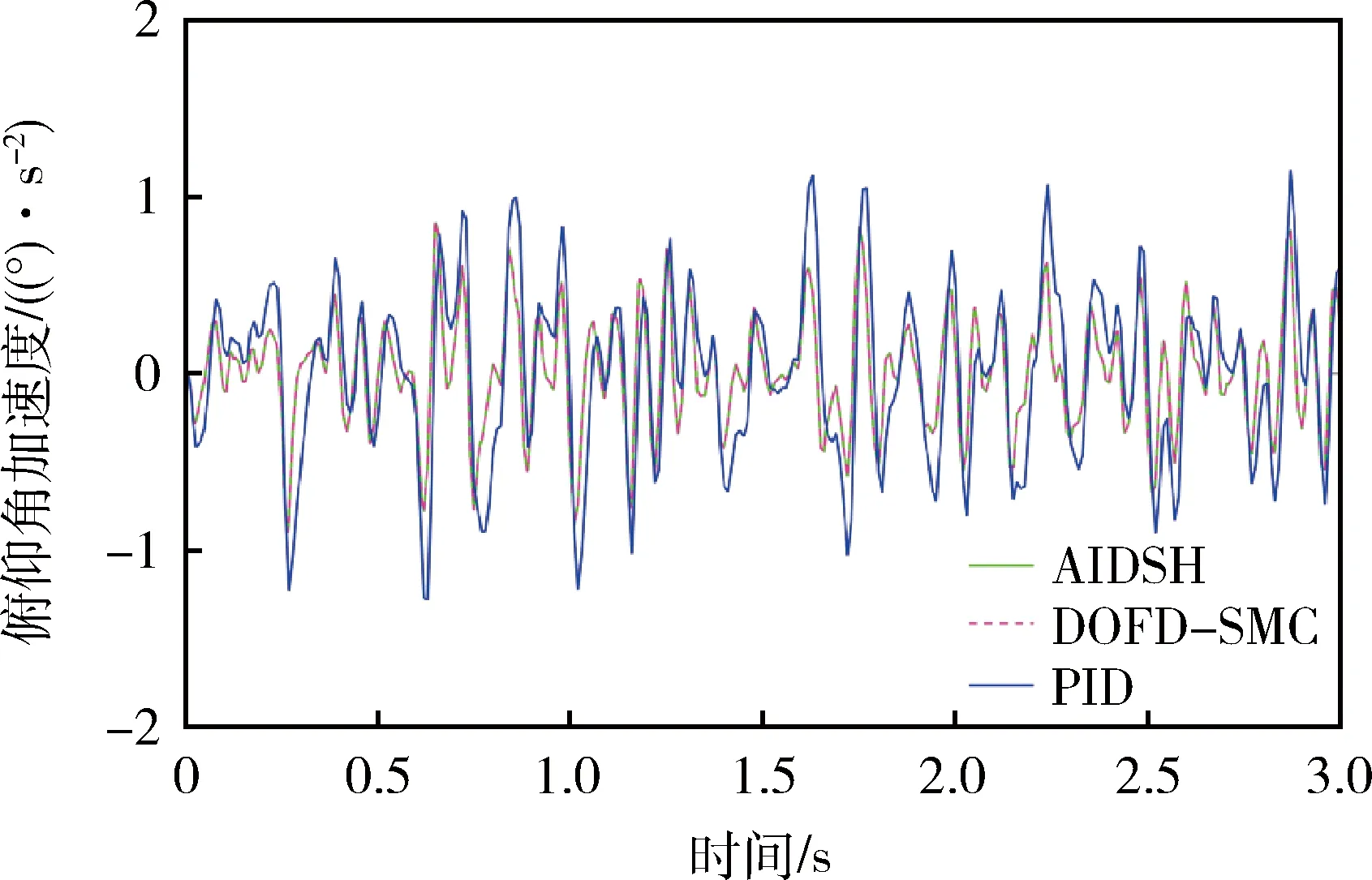
图8 DOFD-SMC与PID控制下的车身俯仰角加速度
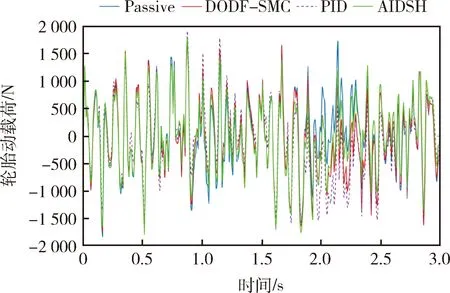
图9 不同控制作用下的轮胎动载荷对比示意图
仿真过程中为检验扰动观测器补偿效果,加入正弦波干扰信号用于模拟系统参数波动干扰,由图5至图8仿真结果表明,经过扰动补偿后,模糊动态滑模控制策略在干扰下很好地实现了对自适应理想天棚阻尼参考模型的跟踪,跟踪误差保持在0.05以内,在DOFD-SMC控制作用下的车身垂向加速度及俯仰角加速度输出曲线几乎与参考模型重合,很好地抑制了高频抖振现象并确保了控制系统稳定不发散,相对于传统的无模型PID控制策略,基于模型的DOFD-SMC控制策略具有更好的主动悬架控制效果,通过对仿真数据进行采集并计算均方根值,新型控制策略相对于PID控制策略性能提升在15%以上,且由于参考模型的自适应特性能够适用于复杂多样的路面条件及行驶车速变化工况,对多轴车辆车身俯仰角加速度及垂向加速度进行了更大程度抑制,使得被控对象车辆的行驶平顺性得到有效提升.进一步分析轮胎动载荷,作为悬架系统振动控制特性的评价指标之一,其对车辆路面附着性及操纵稳定性均具有重要影响,对图9中仿真数据进行计算处理,无主动控制(Passive)作用下的轮胎动载荷均方根值为654.69 N,AIDSH控制作用下的轮胎动载荷均方根值为652.37 N,DOFD-SMC控制作用下的轮胎动载荷均方根值为662.25 N,PID控制作用下的轮胎动载荷均方根值为664.83 N.结果表明,AIDSH方法相对于被动悬架轮胎动载荷略有改善,新型控制策略相对于被动悬架DTL下降1.2%,对比传统的PID控制方法在性能上提升0.4%,可见DOFD-SMC方法对车辆的路面附着性能的负面影响较小,优于PID控制策略.
为深入研究被控对象在其所考察频段内各振动特性在不同频率处的响应量,运用正弦激励法分析主动悬架系统的频域响应特性,取参考频率范围为0.011 m-1 由上图中仿真结果可以看出,DOFD-SMC对车身垂向振动的控制效果与AIDSH参考模型近似,与被动悬架系统相比,新型控制方法在低频区、低频共振区和中频区均能很好的抑制车身垂向振动加速度,改善车辆行驶平顺性,仅在高频共振区有略微恶化.在轮胎动行程方面,DOFD-SMC与被动悬架系统及AIDSH参考模型相比,虽然在高频区性能有所恶化,但在中频和低频区域却有明显的改善作用. 图10 不同控制作用下的垂向加速度频域对比 图11 不同控制作用下的轮胎动变形频域对比 文中通过建立某型多轴特种车辆四自由度主动悬架系统动力学模型和设计采用扰动观测的自适应模糊动态滑模主动悬架控制策略,利用MATLAB/SIMULINK软件进行控制策略仿真和结果分析,得出以下结论: 1)自适应理想天棚阻尼参考模型相比于传统天棚阻尼方法能够针对车辆行驶工况变化利用模糊控制策略自校正增益系数,具有更好的鲁棒性和振动抑制能力. 2)文中所设计的用于控制某型多轴特种车辆主动悬架系统动态性能的DOFD-SMC控制器能明显降低车身的垂直振动加速度和俯仰振动加速度,仿真结果证明了新型控制策略在车辆平顺性提升方面的有效性. 3)算法在动态滑模控制基础之上,通过引入扰动补偿及模糊增益调节优化机制,在扰动工况下利用新型控制方法跟踪参考模型成功抑制了传统滑模控制存在的高频抖振及跟踪误差的收敛性问题. 4)AIDSH-DOFD-SMC算法相对于传统PID控制策略较大程度的改善了控制性能且能够适用于更为复杂多样的特种车辆行驶工况,在多轴特种车辆平顺性提升方面具有更好的性能表现.

5 结 论