基于齐格勒—尼柯尔斯PID算法对车辆纵向行驶稳定性的研究
2023-01-18王黎明韩力春
敖 翔,王黎明,汪 洋,韩力春
(海军工程大学 电气工程学院,武汉430034)
智能巡检车是当今车辆发展的一个重要趋势,随着社会的发展,研究者设计智能巡检车能在标准路况下行驶,同时具有全地形的越野能力.车辆在不同地形纵向行驶时,相应的摩擦系数[1]和平整程度的改变会影响[2]车辆行驶的稳定性,可能会造成严重的安全事故.因此研究智能巡检车在不同地形下行驶的稳定性具有很大意义.
目前,增加车辆行驶稳定性的方法主要分为两方面:一方面是机械被动调节,在车轮与车架之间安装悬架弹簧[3],以此缓和及抑制不平整路面所引起的冲击[4],进而完成被动减震;另一方面是算法主动调节,对车辆主控器的速度控制进行参数调节,使其达到车辆运行的稳定性要求[5].速度控制调节相比于机械被动减震,其优点在于主动性强,鲁棒性高和普适性好.针对当前主动调节速度的控制主要用于标准路面,而在道路复杂的路面运用较少[6-7].文中对巡检车在不同的路面纵向行驶时的速度环PID采用齐格勒—尼柯尔斯(Ziegler-Nichols method)算法分析[8],通过Matlab的simulink仿真实验和现实场景下智能巡检车进行速度PID仿真实验[9].结果表明,该方法能使车辆在复杂路面纵向行驶时较快得出对应的PID参数并且能提高车辆纵向行驶的稳定性.
1 车辆动力学分析
1.1 路面分析
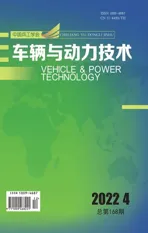
为了便于建立车辆动力学模型,需要对路面材质进行分析,通过查阅《公路与城市道路设计手册》的资料,得到相关参数如表1所示.
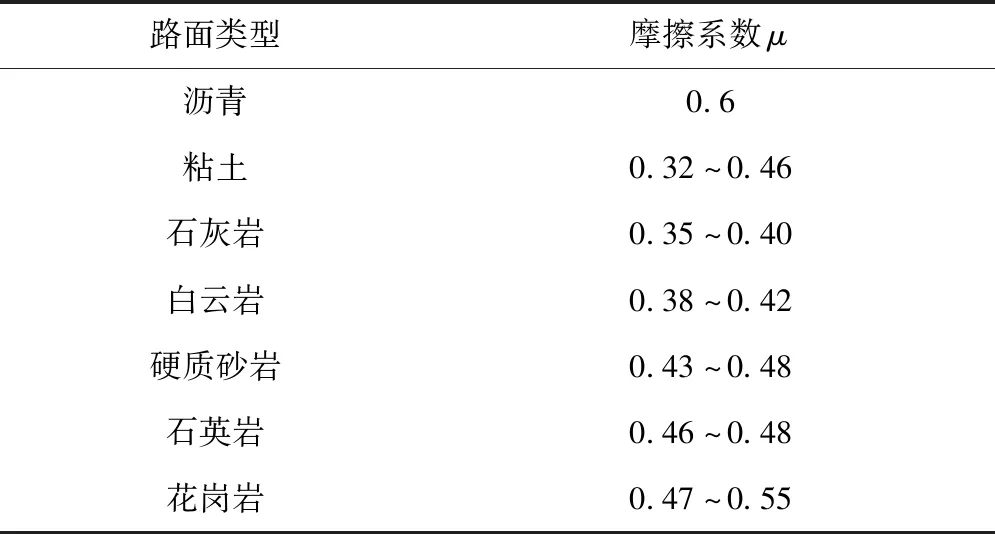
表1 路面各材质摩擦系数
通过表1的摩擦系数参数与《公路与城市道路设计手册》资料,得到标准路面与越野路面指标如表2所示.
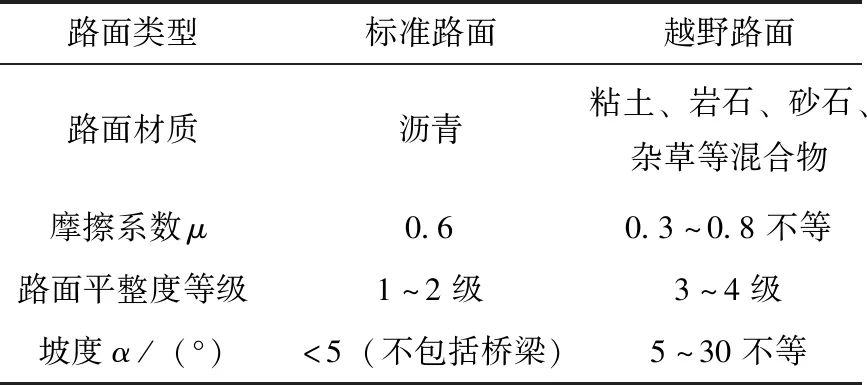
表2 标准路面与越野路面指标
上述数据可以看出以沥青路面作为标准路面,不含杂质,平整度高,摩擦系数变化小,车辆行驶时稳定性高,在进行PID调节时,应优先保证调节速度快;而丛林越野路面是由粘土、岩石、砂石、等混合物构成[10-11],各个物质摩擦系数差距大且路面平整度低,状况复杂,对车辆越野性能考验较大,在进行PID控制时,应优先考虑车辆行驶性能的稳定性.
1.2 车辆行驶时的力学分析
如图1为车辆在理想道路上做纵向行驶时的受力分析示意图,可建立动力学方程.
(1)
式中:m为整车质量;v为整车行驶速度;Ft为车辆行驶牵引力;c为车辆行驶阻尼系数.
对(1)公式进行拉氏变换:
msv(s)=Ft(s)-cv(s).
(2)
建立速度传递函数模型为
(3)
图1 车辆行驶受力分析
2 车辆速度PID的控制分析
2.1 控制模型的建立
为了便于搭建仿真模型,需建立控制系统的传递函数图,如图2所示.
控制算法采用经典PID进行速度控制,电机内编码器检测速度参数作为速度反馈回路[12].该车辆在行驶时路面平整度不同,因此,可在该模型中加设不同的干扰值作为不同路面的平整度对速度PID参数进行分析.

图2 控制传递函数图
2.2 齐格勒—尼柯尔斯离散PID算法分析
连续型PID算法为
(4)
式中:e(t)=p(t)-b(t)为给定值p(t)与实际输出值b(t)构成的偏差;系数kp、ki、kd分别对应比例、积分、微分系数.
将积分系数和微分系数改写为时间常数的形式,可得到:
(5)
在工程中,要求对连续PID进行离散化分析,则有如下公式.
(6)
式中:T为采样周期.
将上述公式代入PID连续公式中,改写为增量式离散PID方程有

(7)
目前对比例系数、积分时间常数和微分时间常数进行调节所采用的方法普遍是齐格勒—尼柯尔斯调节方法,该方法的优点是可在不确定被控对象模型前提下,确定PID参数.调节方法为:先设Ti=∞,Td=0,只调节kp,使kp达到临界阻尼kc,得到的正弦波形如图3所示,其周期设为P(c).则可得到kp、Ti、Td的参数如表3所示.
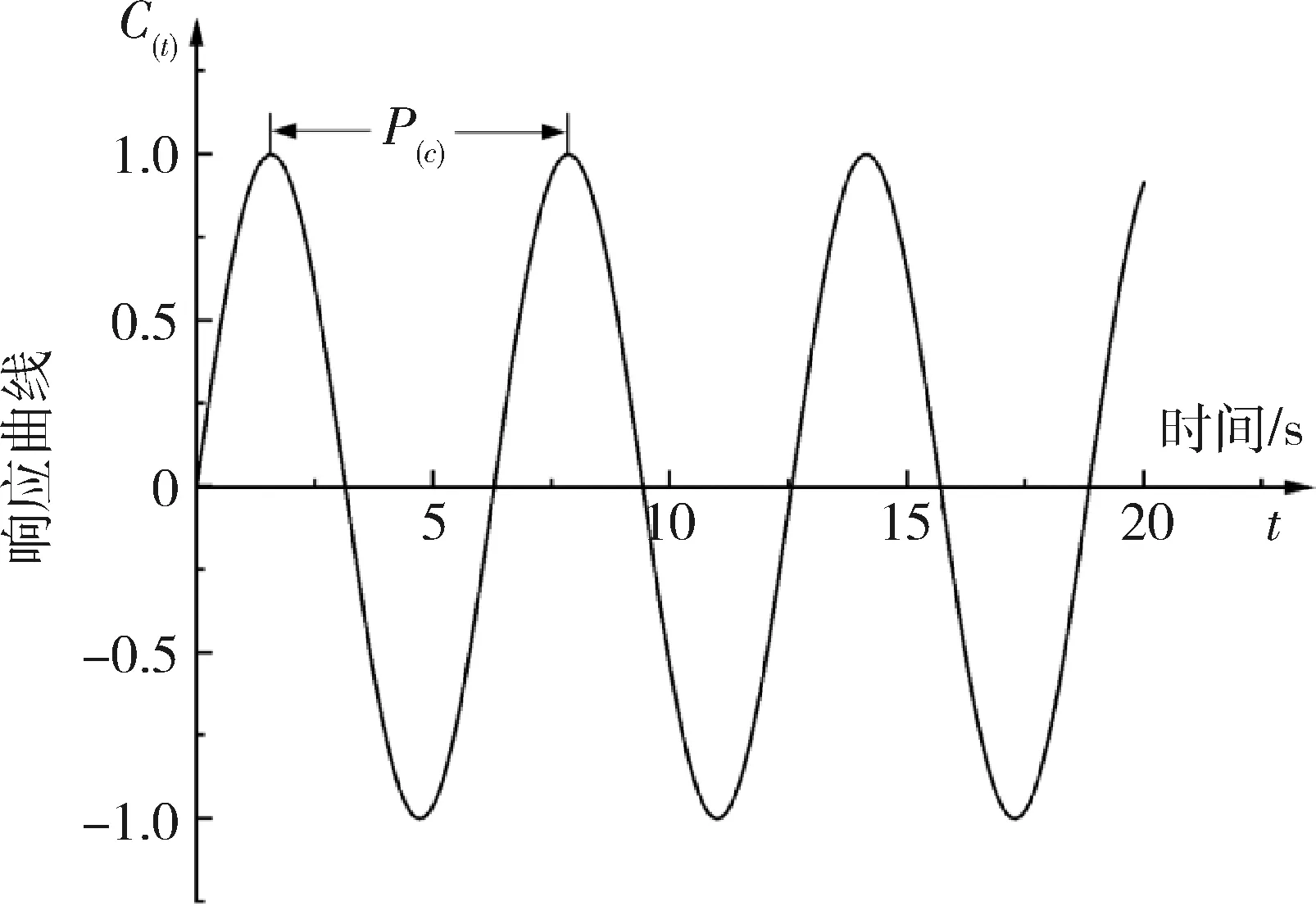
图3 临界阻尼波形图
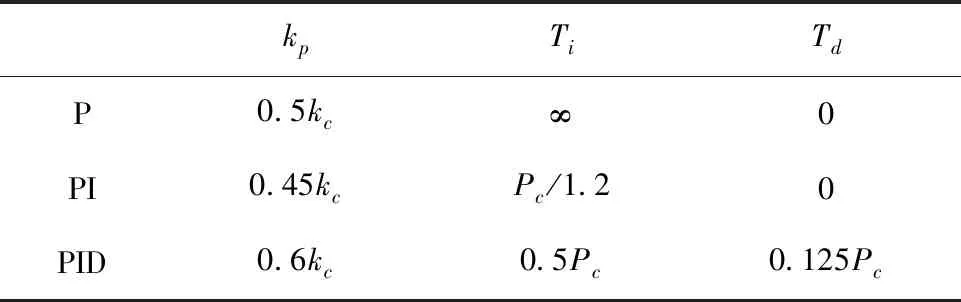
表3 齐格勒—尼柯尔斯调节方法
3 仿真模型
3.1 simulink模型搭建
结合公式(3)与图2的传递函数图对车辆速度控制建立数学模型,车辆在不同路面下随着PID参数的变化,速度稳定性也发生变化,在Matlab-simulink分析PID参数对速度稳定性的影响,simulink仿真模型图如图4所示.
在仿真中,引入4组PID参数做对比,其值如表4所示.在该表中,PID1为齐格勒—尼柯尔斯算法所得出参数值,PID2、PID3、PID4均是在该基础上适当减小ki、kd后所得参数值以应对崎岖地形的干扰.
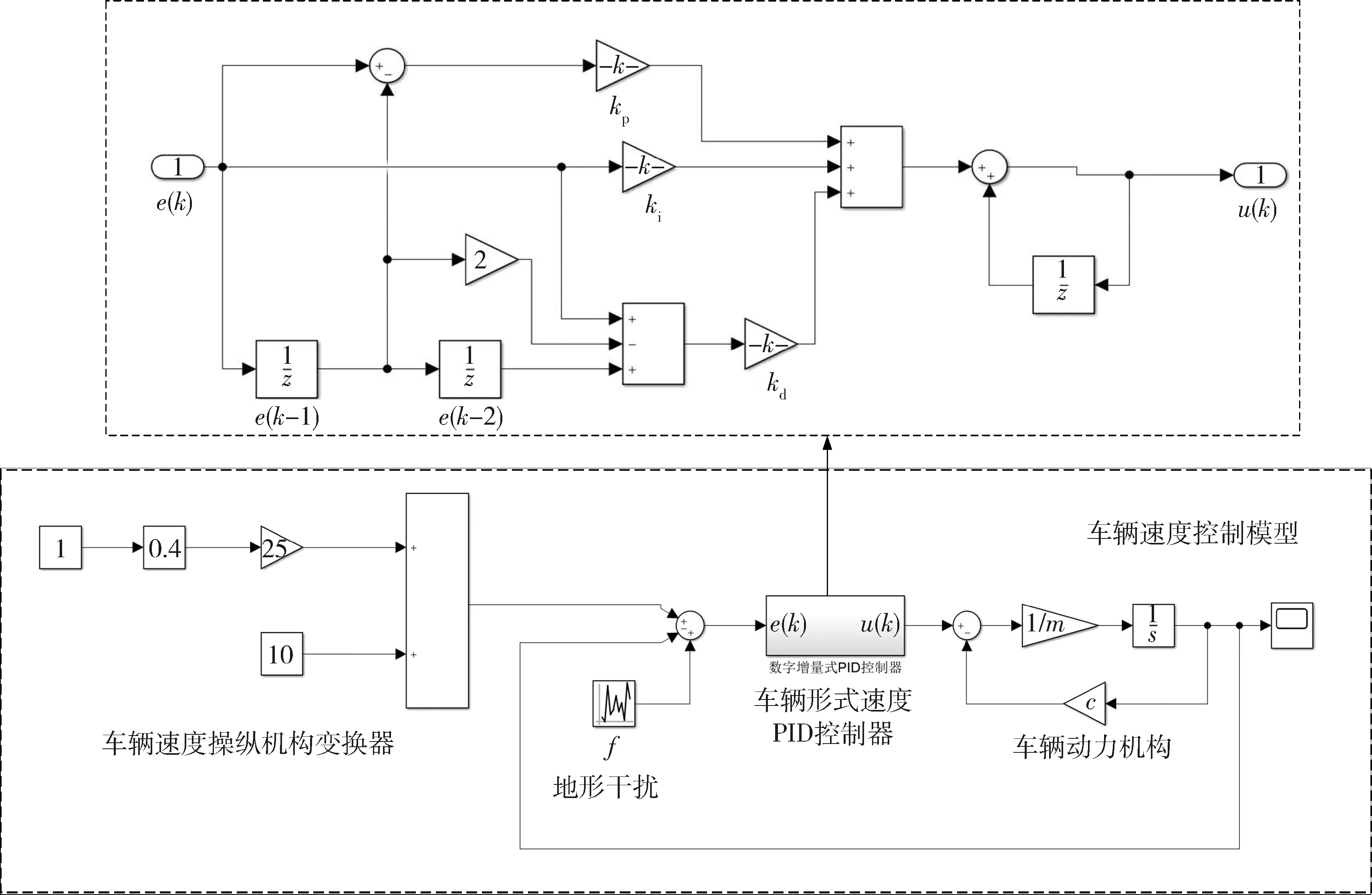
图4 车辆速度控制模型图
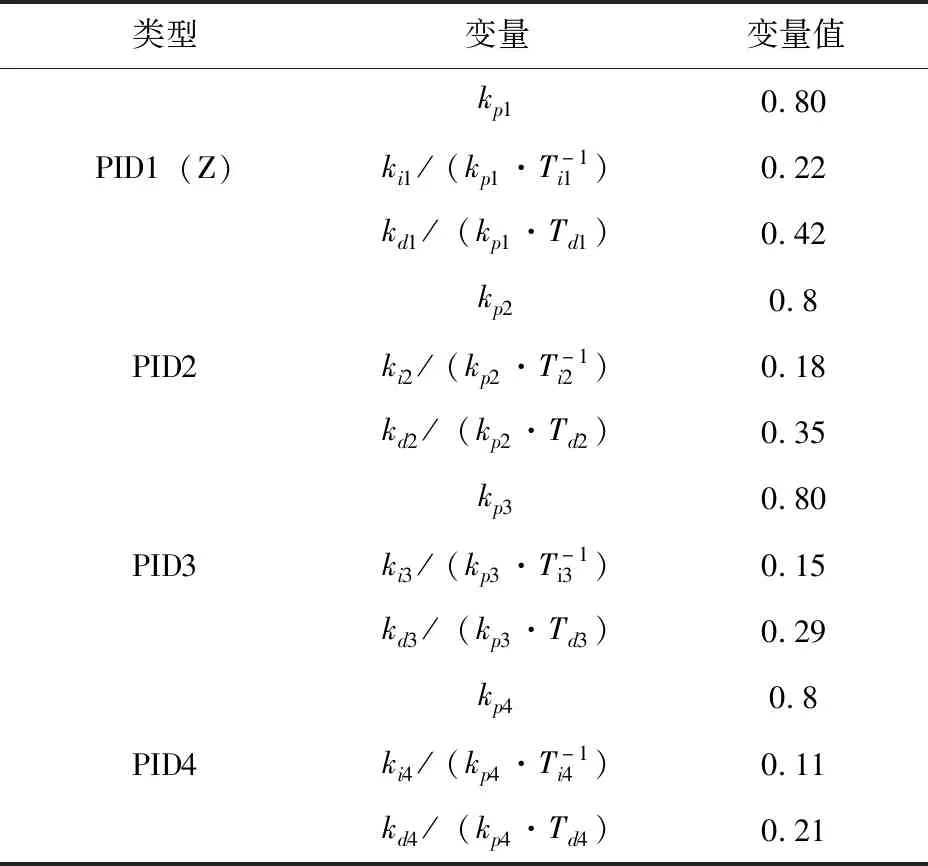
表4 越野路面最优PID参数值
在仿真中,为确保车辆纵向行驶仿真效果更加真实,加入随机数f作为在标准地形和越野地形的情况下路面崎岖程度对车辆纵向行驶的速度干扰,在标准地形下干扰值f1取值为速度值的5%,在越野地形下干扰值f2取值为速度值的20%.并通过查找实验车辆相关参数,确定标准地形下阻尼系数c1为20,越野地形下阻尼系数c2为30.相关参数如表5所示.
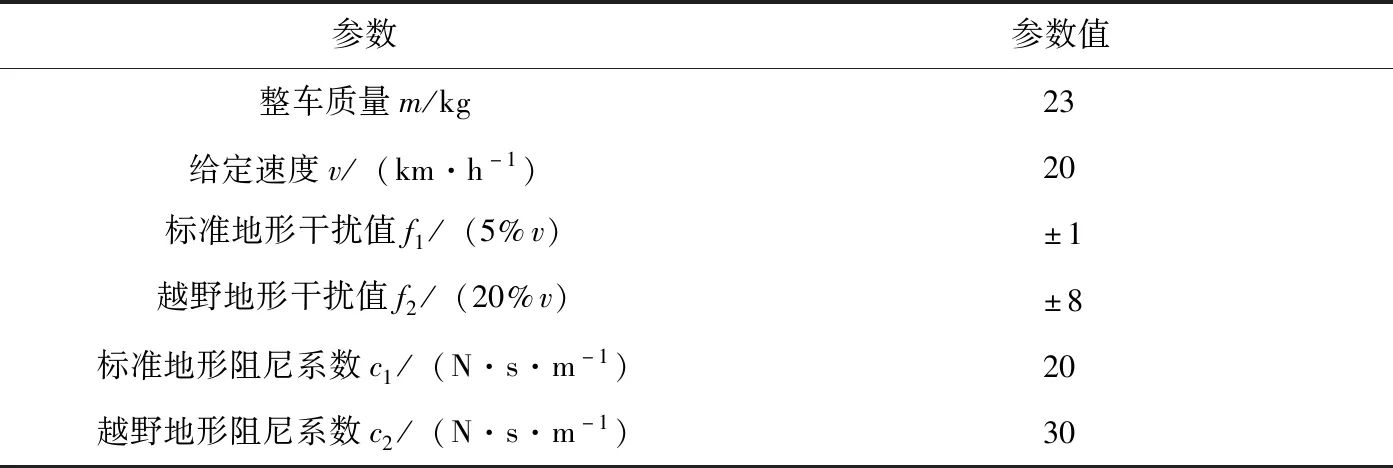
表5 车辆结构仿真参数表
3.2 仿真结果分析
将上述参数带入simulink仿真图中,再设置不同的PID值,得到仿真图如图5所示.
由图可知,在标准路面上PID4中的ki4与kd4的取值均是50%的ki1与kd1,其调节时间为1.75 s,若调节时ki、kd值小于其值,则响应较慢,不满足工程要求,所以PID2与PID3中的ki、kd是以PID1与PID4为参考,分别取84%与68%(在100%与50%下的ki、kd值进行均分)的ki、kd值进行对比分析.对上述路面,加入PID算法均可提升系统的稳定性,且齐格勒—尼柯尔斯PID算法在标准路面下调节时间短,能将系统的误差带控制在5%的以下.在图(d)的越野路面下,4种PID值对应控制系统的误差带分别为17.5%、12.5%、9.3%、6.2%,所以可先调出齐格勒—尼柯尔斯PID参数,后根据相关要求,适当降低ki与kd参数值,牺牲一定的调节时间,增加系统稳定性,以满足越野路面稳定性的要求.
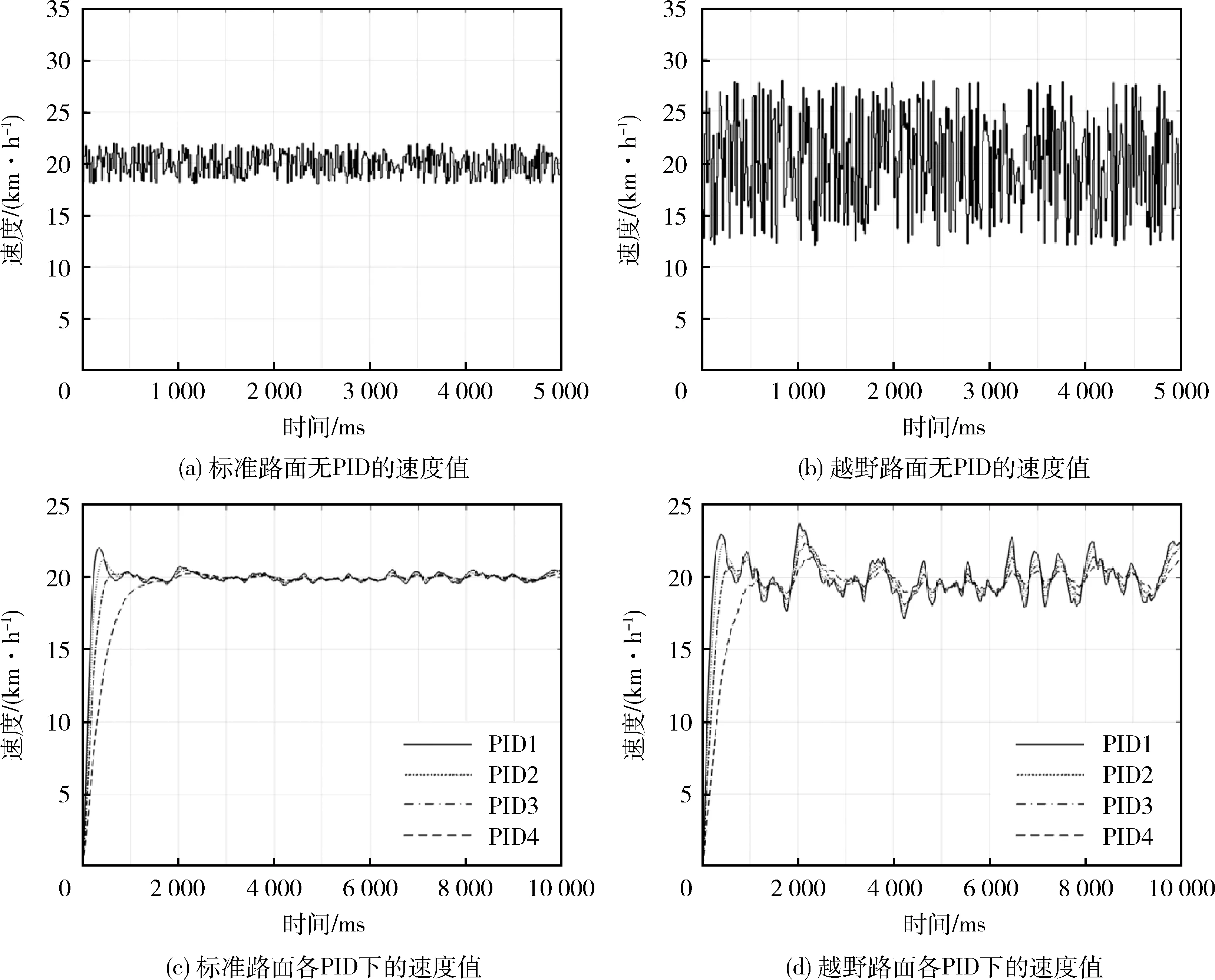
图5 仿真波形图
4 实物测试
为了进一步证明仿真结论,构建相应实物模型,以松灵SCOUT做为外壳,电机选用野火直流无刷电机,主控制器为野火STM32F407IGT6,电机驱动器为野火BLDC直流无刷电机驱动板,通信模块为HC06蓝牙模块,相关设备参数如表6所示.

表6 实验设备型号表
根据表6中器件搭建实验模型,实验模型以松灵SCOUT为小车外壳,四个轮毂均安装野火直流无刷电机与1∶120减速器,对实验小车进行驱动.主控制器为野火STM32F407IGT6,用于接收、处理、发送各类信号.电机驱动模块为野火BLDC直流无刷电机驱动板,用于接收主控制器的电机驱动信号以驱动电机和接收电机编码器的速度反馈信号发送至控制器进行处理.通信模块为蓝牙HC06模块,用于将主控制器与上位机相连,实时监测和调节电机的运行状态.其原理如图6所示。
进行实物实验,通过相应PID参数调节得到电机速度波形图如图7所示.
由于测试越野地形平整度低,所以引用表5中PID1(齐格勒—尼柯尔斯算法参数)与PID4的参数作为对比,分别写入控制器中.得到图7的电机速度波形图,在测试中该车在额定速度下运行时的电机转速为2 460 r/min.由上述图可知:在标准地形下,PID1(齐格勒—尼柯尔斯PID算法)的参数相较于PID4调节时间短,能更好的满足要求;而越野路面下,PID4相较于PID1调节时间较长,但其速度曲线较平滑,无过大抖动,更适用于越野路面下,该结论与仿真结论一致.
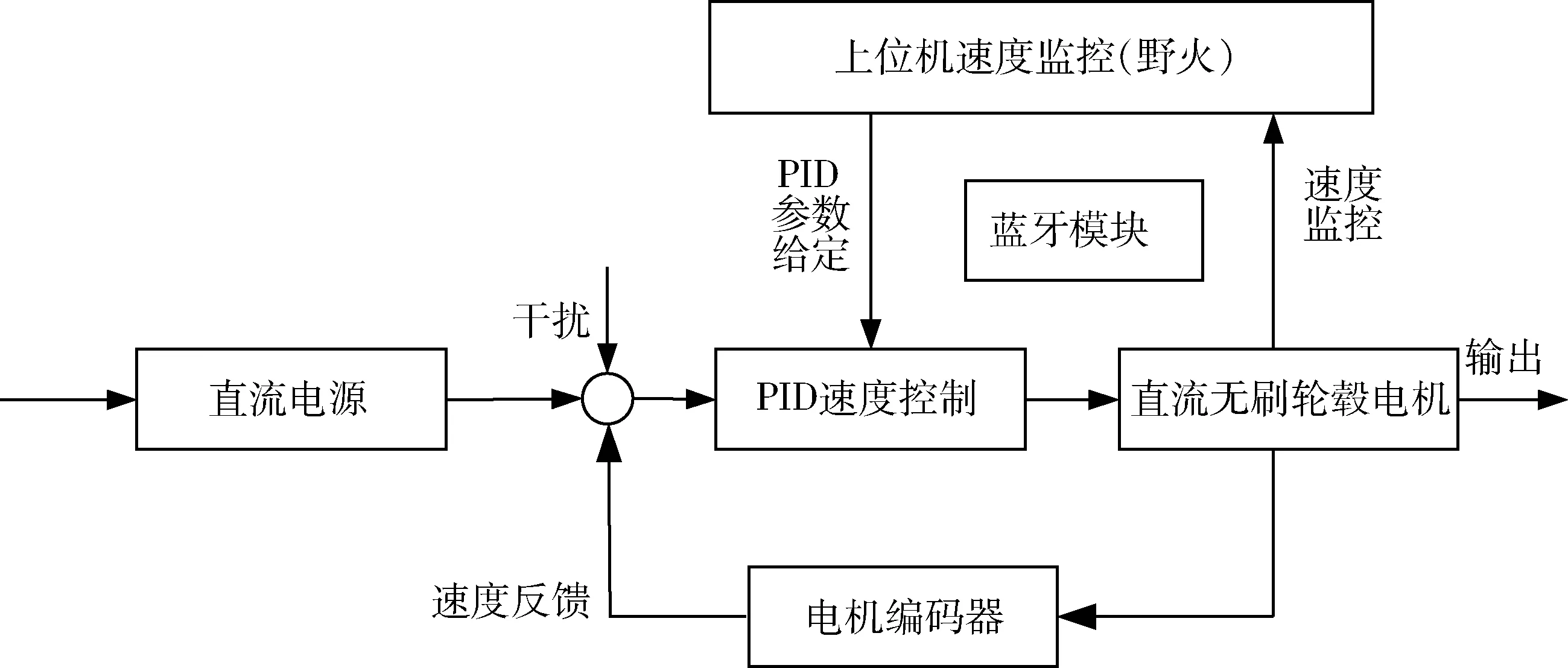
图6 实验原理图
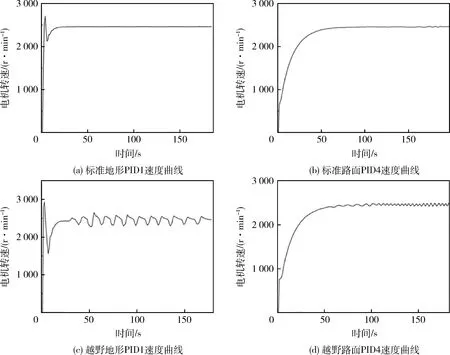
图7 电机速度波形图
5 结 论
本文通过Matlab的simulink对车辆在不同道路行驶的速度环PID进行仿真控制得到相应的仿真控制曲线,并搭建实物进行验证,得到如下结论:
1)车辆在标准地形下行驶时,可以直接使用齐格勒—尼柯尔斯PID算法调节,使其在较短时间达到系统稳定.
2)在干扰程度较大的越野地形,直接采取齐格勒—尼柯尔斯PID算法调节会使电机在误差矫正时,动作“过大”,产生不稳定波形.可根据道路情况适当减少ki、kd的值(由于本文测试路面平整度低,所以将ki、kd减少为原参数的1/2)以增加调节时间来换取电机行驶的稳定性.
应用文中方法,可针对车辆在较复杂路面行驶时较快设定出合理的PID参数,提升工作效率.