复杂天气和环境下交通标志图像特征匹配技术的研究
2023-01-18赵俊梅张利平
赵俊梅,张利平
(中北大学 电气与控制工程学院,太原 030051)
交通标志对于交通参与者来说,信息量非常多,对于辅助驾驶、无人驾驶来说,更是具有举足轻重的作用.交通标志类型(指示标志、警告标志、禁止标志)多,形状(三角形、矩形、圆形、多边形)、颜色(红色、蓝色、黄色)不尽相同,具体含义(文字、数字、字母、方向等信息)非常丰富,再加上实际交通标志的安装位置的差异,给交通标志检测和识别带来非常大的挑战.同时,车辆因为道路环境的改变,在行驶过程中采集图像时易受车辆晃动和角度不同的影响,采集到的标志图像具有随机性和不稳定性.交通标志长时间暴露户外,也容易褪色、缺损和变形,也容易受到建筑物、树叶、广告牌等干扰物遮挡.为了安全辅助驾驶,需要行驶车辆离交通标志一段距离时检测到标志,采集到的交通标志图像会有其它非目标的干扰对象,这对交通标志实时精准定位要求非常高.文献[1]利用卷积神经网络对交通标志图像进行检测和识别.文献[2]利用YOLO_V4和DCGAN网络对标志图像检测和识别.文献[3]利用标志的几何特征和Hu不变矩等特征进行定位和识别.文献[4]利用高对比度特征、分流级联等算法对特殊情况下的标志图像进行分类和识别.文献[5]利用颜色和形态学对交通标志图像进行检测.
卷积神经网络需要大量的样本图像库,而且需要GPU硬件设备.特征检测方法不需要太多约束.而局部特征相对于全局特征来说,具有更强的描述能力,具有重复性好、鲁棒性高等特点,文中比较和分析几种局部特征算法对交通标志图像进行目标定位.
1 角点特征检测
1.1 SURF
SURF(Speeded Up Robust Features)算法是局部特征的高效稳定的算法之一.它具有特征抗干扰能力强等优点,而且计算速度较快.算法可分为特征点检测和特征点描述矢量生成两个阶段[6].SURF算法先对图像进行积分图像计算,然后用盒状滤波器近似二次高斯滤波生成Hessian矩阵,最后采用非极大值抑制定位特征点.图像中的像素的积分值是原图像中该像素左上方矩形区域内的全部像素点的灰度值之和.图像中任意一点I(x,y),它在尺度空间上面的Hessian矩阵表示为
(1)
1.2 FAST
FAST(Features from Accelerated Segment Test)算法具有检测速度快、计算复杂度低的优势,非常适合实时目标检测和跟踪的情形[6].FAST算法考虑每个像素点周围的一圈像素,如果在这个邻近像素组成的圆上有若干个连续像素的灰度同时大于或小于该像素,则认为它是一个角点.确定FAST特征点的表达式为
N=∑x∀(circle(p))|I(x)-I(p)|>εd,
(2)
式中:I(x)是圆周上面的特征点的灰度像素值;I(p)是中心特征点的灰度像素值;εd是两个灰度值的阈值;N是两个特征点灰度值的差大于εd的数量.
1.3 ORB
ORB(Oriented FAST Rotated Brief)算法由FAST进化而来,拥有FAST算法的部分优点,同时克服了FAST算法的缺点[6].它具有非最大值抑制,控制特征点数量的特点.ORB算法分为两部分,具体是特征点提取和特征点描述.特征提取是由FAST算法发展来的,特征点描述是根据BRIEF特征描述算法改进的.算法首先利用FAST特征点检测的方法来检测特征点,然后利用Harris角点的度量方法,从FAST特征点挑选出Harris角点响应值最大的特征点.FAST特征点是没有尺度不变性的,为了增加尺度不变性,ORB算法通过构建高斯金字塔,并在每一层金字塔图像上检测焦点来实现.另外,ORB算法采用了灰度质心的方法让它检测到的特征点具有旋转不变性.
1.4 KAZE
KAZE算法的特征点检测是计算不同尺度下的Hessian矩阵行列式的响应值并寻找局部极大值点作为特征点,是对Hessian矩阵行列式响应值做归一化[7].KAZE算法主要步骤包括:首先利用非线性扩散滤波构建非线性尺度空间.在非线性扩散滤波中,将图像亮度值L不同尺度的变化看为流动函数的散度;利用隐式差分方程,以AOS(加性算子分裂)算法进行迭代近似估计微分方程;以金字塔为尺度空间原型,尺度级别按照指数增加.算法中,对原始图像进行高斯滤波,计算对比度参数,构造非线性尺度空间图像;非线性不变特征算法KAZE依据不同尺度的归一化Hessian矩阵查找图像的局部极大值点,将每个像素点与同一尺度3×3邻域中的8个相邻点以及上下相邻尺度的共2×9个像素点进行灰度值比较.若该像素点为极值点,则将其作为关键点的候选点;以60°的扇形窗口对特征领域内的像素点进行直方图统计,统计高斯加权计算特征点的主方向,进而计算每个区域的的描述向量,通过对特征向量归一化,构建KAZE特征描述子.
1.5 BRISK
BRISK(Binary Robust Invariant Scalable Keypoints)算法主要利用FAST9-16进行特征点检测,其改进是尝试识别特征的尺度大小以及方向[6].BRISK首先通过创建具有固定数量的尺度的空间金字塔,然后根据尺度计算固定数量的intra-octave识别尺度.BRISK特征检测器首先应用FAST来查找这些尺度的特征,然后使用非极大值抑制来找到最大特征点.BRISK描述符由围绕中心点的一系列环构成.在所有圆的配对之间计算构成逐位描述符的亮度比较.这些配对构成短距离配对和长距离配对两个子集.短距离配对形成特征描述符,长距离配对用于计算主导方向.
2 复杂天气和环境下的特征匹配
2.1 复杂天气
实际的交通环境非常复杂,交通标志所在的环境变幻莫测,对于雨、雪、雾等恶劣天气的情况下,没有路灯或者光线不足的情况下,交通标志的检测和定位困难更大[8].文中通过添加椒盐噪声,噪声密度为0.05,模拟实际大雪天气.添加高斯白噪声,均值为0.3,方差为0.01,模拟大雨天气,添加方差为0.08的乘性噪声,模拟光照度不高或者晚上的情形.图1是参考模板图像,图2是待配准的交通标志实际图像,图3是椒盐噪声下的SURF算法的两幅图像的配准图,图4是椒盐噪声下的SURF算法的标志定位图,图5是高斯噪声下KAZE算法的两幅图像的配准图,图6是高斯噪声下KAZE算法的标志定位图.参考图像和待匹配图像中通过+或○表示特征匹配点.

图1 参考图像

图2 交通标志图像
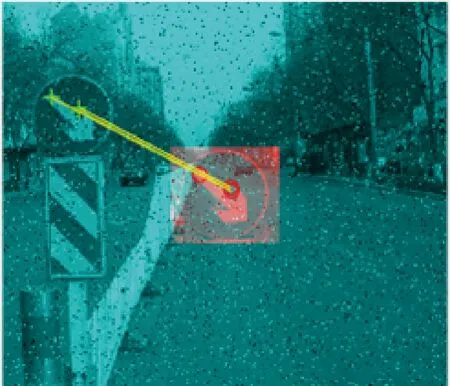
图3 椒盐噪声下SURF算法的标志匹配图

图4 椒盐噪声下SURF算法的标志定位图

图5 高斯噪声下的KAZE算法的标志匹配图

图6 高斯噪声下的KAZE算法的标志定位图
表1是椒盐噪声下的5种局部特征算法的匹配结果情况表.表2是高斯噪声下的5种局部特征算法的匹配结果情况表.表3是乘性噪声下的5种局部特征算法的匹配结果情况表.从3个表中可以看出:KAZE算法检测和匹配效果最好;SURF算法次之;FAST和ORB算法效果比较差.匹配数量为零的话,未写出运行时间,故表中是空的.

表1 椒盐噪声下5种局部特征算法匹配的结果

表2 高斯噪声下5种局部特征算法匹配的结果
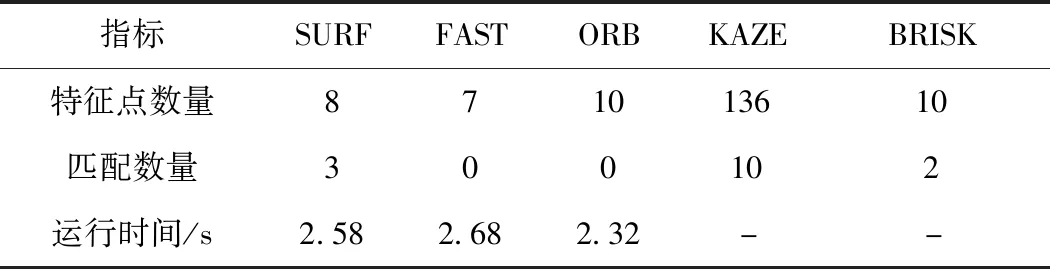
表3 乘性噪声下5种局部特征算法匹配的结果
2.2 复杂环境
交通标志所在的实际环境差异非常大,有的交通标志可能被树木或广告牌等遮挡,有的交通标志可能被撞击后倾斜或变形,有的交通标志颜色褪色,这均给定位带来了挑战[9].文中将图像旋转15°,模拟标志牌位置改变或者颠簸造成采集角度变化.将图像添加圆形滤波器,模拟标志牌褪色、光照度变化或者天气阴暗变化.将图像添加树叶,模拟标志被遮挡.图7是待配准的交通标志实际图像.图8是顺时针旋转15°后SURF算法的两幅图像的配准图.图9是旋转15°后SURF算法的标志定位图.图10是遮挡后的ORB算法的标志匹配图.图11是标志定位图.

图7 交通标志图像

图8 旋转角度后的SURF算法的标志匹配图

图9 旋转角度后的SURF算法的标志定位图
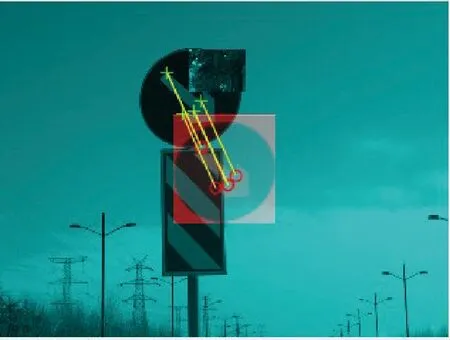
图10 遮挡后的ORB算法的标志匹配图

图11 遮挡后的ORB算法的标志定位图
表4是顺时针旋转15°后5种局部特征算法的匹配结果情况表.表5是模拟模糊褪色情况下5种局部特征算法的匹配结果情况表.表6是被树叶遮挡情形下5种局部特征算法的匹配结果情况表.从3个表中可以看出:SURF算法匹配和定位效果最好;其次是KAZE算法;FAST算法最差.

表4 旋转角度下5种局部特征算法匹配的结果

表5 模糊褪色下5种局部特征算法匹配的结果

表6 遮挡下5种局部特征算法匹配的结果
2.3 复杂天气和复杂环境
为了适应复杂天气和复杂环境下的交通标志目标定位的要求,进行二者结合的复杂环境进行模拟仿真.对旋转和模糊结合、遮挡和椒盐噪声的情形进行模拟.
表7是旋转和模糊后的5种局部特征匹配结果情况表.图8是遮挡和噪声下的5种局部特征匹配结果情况表.从两个表中可以看出,5种算法均不理想,匹配和定位效果无法适应实际环境.故需要新的特征检测算法来解决问题.根据表1~8的匹配数量和运算时间,SURF算法和KAZE算法的综合效果最佳.故考虑利用二者相互补充,来进行交通标志定位任务.

表7 旋转和模糊下5种局部特征算法匹配的结果

表8 遮挡和噪声下5种局部特征算法匹配的结果
3 SURF-KAZE算法
根据上面的实验,可以明显看出,SURF算法具有尺度不变性特征、运算速度快、稳定性好,KAZE算法鲁棒性强、抗噪声能力强、运算速度快,匹配率高.KAZE算法对于标志旋转比较敏感,SURF算法抗噪声能力比KAZE算法稍微弱一些,故充分考虑二者的优缺点,将其有机结合,再进行目标定位,效果会更好.SURF-KAZE算法步骤如下:
(1)检测参考图像和待配准图像的SURF和KAZE特征值.
(2)提取参考图像和待配准图像的SURF和KAZE的特征描述符.
(3)首先对KAZE描述符进行匹配,再对SURF描述符进行匹配.为了获取更多的特征匹配点,需要设置合理阈值.
(4)获取SURF和KAZE的候选特征描述符.
(5)将SURF和KAZE的候选特征值全部考虑,进而获得SURF-KAZE的综合特征点的位置,进而获取更好匹配点.
图12是顺时针旋转10°和圆形滤波器的模糊噪声下的标志匹配图.图13是顺时针旋转10°和圆形滤波器的模糊噪声下的标志定位图.图14是在旋转和模糊噪声基础上面再添加椒盐噪声,噪声密度为0.2的标志匹配图.图15是标志定位图.

图12 旋转和模糊下两种算法标志匹配图

图13 旋转和模糊下两种算法标志定位图

图14 旋转、模糊和椒盐噪声下的标志匹配图

图15 旋转、模糊和椒盐噪声下的标志定位图
4 仿真分析
交通标志种类多、所处环境复杂,为了证明SURF-KAZE算法的有效性和鲁棒性,通过仿真平台,进行了大量实验.采集到50幅实际道路环境下的交通标志图像,进行了各种噪声、旋转、遮挡等模拟,图像库可以扩展到200幅左右图像.电脑配置如下:CPU选用i5-7200U,2.70 GHz;RAM选用16.0 GB.通过仿真平台,进行了大量的仿真实验.交通标志的匹配准确率可以达96%以上,如果旋转角度大、噪声级别高,会给目标定位带来问题和错误率.图16是参考模板图像.图17是添加树叶遮挡后的图像.图18是遮挡基础上添加旋转角度和噪声的标志匹配结果图.图19是标志定位图.

图16 参考图像 图17 被遮挡的交通标志图像

图18 遮挡、旋转、噪声下的标志匹配图

图19 遮挡、旋转、噪声下的标志定位图
5 结 论
交通标志的精确、快速定位是智能车辆的重要领域,是实现无人驾驶、辅助驾驶的主要内容之一.结合局部特征的优势和特点,对5种局部特征的检测、匹配效果和能力进行了对比分析,并提出了SURF-KAZE互补结合的算法.对交通标志图像进行了大量仿真实验,证明了算法的抗干扰能力、精确定位能力,说明算法在复杂的道路环境下,具有一定的实用性.文中提出的算法相对单一局部特征算法来说,弥补了其缺点和劣势,集成了SURF与KAZE的优势,具有非常强的鲁棒性、稳定性、准确性.算法相对卷积神经网络来说,具有运行时间短、图像数据集少、定位效果好等特点.