基于变幅信号前馈和倾角反馈的调平性能提升
2022-09-16吴广宁
赵 燕,王 骏,焦 祥,吴广宁
(无锡职业技术学院 机械技术学院,江苏 无锡 214000)
引言
调平技术广泛应用于现代军事与工程设备中,如雷达、导弹发射车、高空作业车、大型钻机和重型起吊车等,调平对设备本身的工作性能有很大影响[1-3]。以高空作业消防车为例,主臂在变幅运动过程中与水平面形成一定夹角,导致工作平台与水平面产生相同的夹角,而调平机构需迅速对工作平台的倾角进行调整,保证工作平台始终水平,防止因工作平台的倾斜对操作人员的生命安全产生威胁[4-5]。然而,由于液压系统本身固有的非线性、参数时变、元件非一致性、电液参数需匹配(电方面或电液或控制方面问题)等特性[6-8],高空作业车辆在变幅过程中,电液调平系统易产生滞后,从而导致变幅初始动作时工作平台与水平面之间的夹角偏差及夹角超调量增大,轻者引起整个变幅过程调平时间长,工作平台抖动,重则直接影响操作人员的人身安全。因此,如何解决初始变幅起升时工作平台与水平面的夹角超调量大的问题,对改善高空作业车辆的性能,提高产品安全性具有重要的研究意义。
目前,对于工作平台的调平性能研究主要集中于调平元件优化、调平铰接点位置/机构优化、模糊PID控制、角度闭环反馈控制等方面[9-11],同时结合前馈控制和反馈控制方面的研究较少。因此,本研究以某款典型高空作业消防车的变幅和调平系统为载体,结合机电液系统建模仿真和整机测试分析,在反馈控制的基础上,从变幅信号前馈方面对电液调平系统进行仿真优化。
1 系统测试
图1为某款消防车的变幅及调平液压系统原理图,主要由液压泵、主阀、变幅油缸组件、调平油缸组件等组成,其中主阀是由1个电液比例变幅阀和1个电液比例调平阀组成,分别控制变幅油缸组件和调平油缸组件。消防车在工作平台上安装倾角传感器采集工作平台与水平面的夹角信号[12],当夹角信号大于设定的目标值,电液比例调平阀通过接受控制器输出的PWM脉宽调制信号,控制调平油缸伸缩来完成工作平台前倾或后倾,从而完成调平控制,保证工作平台始终与地面保持水平。
通过对该消防车现场测试发现,初始变幅起升时工作平台与水平面的夹角出现超调且幅值较大,平台出现抖动,给用户带来极大的不适感。典型的测试曲线如图2所示,该工况为发动机高速(1600 r/min)、工作平台满载(300 kg),主臂变幅角度φ由-12°开始起升至75°,具体如下:

图2 变幅起升时主臂和工作平台角度的测试曲线
(1)0~4.5 s时,主臂静止不动,变幅角度φ为-12°,此时工作平台角度θ保持在-0.8°;
(2)4.5~8 s,主臂开始变幅起升,变幅角度φ开始变大,工作平台与水平面的夹角θ逐渐增大;第8秒时,变幅角度φ增大至-4°,工作平台倾角θ由-0.8°增大至3.8°,角度变化量为4.6°,工作平台与水平面的夹角超调量为3.8°;
(3)8~45 s,主臂角度φ由-4°变幅起至75°,工作平台角度θ由3.8°回调振荡,最终稳定在1°左右。
2 问题分析与改进措施
2.1 问题分析
阀控对称液压缸是由四边滑阀和对称液压缸组成的,由图1可知,该款消防车的调平系统属于阀控对称液压缸,阀为电液比例调平阀,对称液压缸为2个调平油缸。
阀的线性化流量方程为:
QL=Kqxv-KcpL
(1)
式中,QL——负载流量
Kq——流量增益
xv——阀芯位移
Kc——流量-压力系数
pL——负载压力
液压缸的连续性方程为:
(2)
式中,AP——液压缸活塞有效面积
xP——活塞位移
Ctp——液压缸总泄漏系数
Vt——液压缸总压缩容积
βe——有效体积弹性模量(包括油液、连接管道和缸体的机械柔度)
液压缸的输出力与负载力的平衡方程为:
(3)
式中,mt——活塞及负载折算到活塞上的总质量
BP——活塞及负载的黏性阻尼系数
K——负载弹簧刚度
FL——作用在活塞上的任意外负载力

(4)
式中,ωh——液压固有频率
ζh——液压阻尼比
式(4)为以惯性负载为主时的阀控液压缸的动态特性。分子中的第一项是稳态下活塞的空载速度,第二项是因外负载力造成的速度降低。在调平液压系统中,活塞位移xP看作调平油缸位移,对位移xP影响最大的2个因子为电液比例调平阀的阀芯位移xv和外负载力FL。外负载力FL为干扰信号,而电液比例调平阀的阀芯位移xv是指令信号。
调平液压系统为电液比例系统,而电液比例系统受比例阀中位死区等因素的影响而呈现出很强的死区非线性,可导致系统产生稳态误差,制约系统的动态性能,有效的死区补偿可以改善电液比例位置系统的动静特性,而比例阀死区补偿效果由死区参数决定[14]。因此,对电液比例调平阀进行台架测试,图3是电液比例调平阀在进回油压差为3 MPa时,控制电流从0 mA逐渐增大至1400 mA时其输出流量的测试曲线。由曲线可知,该电液比例调平阀的控制区间为480~1200 mA,死区为0~480 mA。

图3 电液比例调平阀控制特性测试曲线
当主臂起升、变幅角度开始发生变化时,工作平台与水平面的夹角通过传感器反馈到控制器,控制器输出PWM信号控制电液比例调平阀,使工作平台跟随主臂变幅运动。即变幅起升时,工作平台需前倾,确保其与地面保持水平。然而,由于比例阀死区原因,当控制器输出PWM信号时,电液比例调平阀不能立即响应控制信号,需控制信号越过死区后才能开启[15]。如何补偿比例阀死区,提高其控制性能,是比例阀控制面临的一个挑战[16]。此外,由于高空作业消防车作业高度是其重要指标,因此长管路是不可避免的,而液压长管路及液压系统自身油液压缩性、系统建压时间等因素进一步加剧了调平系统的迟滞现象[17-19],导致主臂变幅至一定角度后,电液比例调平阀才有控制信号,调平系统才有流量通过,调平油缸才开始对工作平台进行调平,而这最终体现为初始变幅起升时工作平台与水平面的夹角超调量大。
2.2 改进措施
为解决初始变幅起升工作平台与水平面的夹角超调量大的问题,提出以下改进方案:在现有工作平台倾角闭环反馈控制的基础上,增加变幅信号前馈,即通过检测电液比例变幅阀的控制信号,间接检测变幅角度,使控制器超前输出控制信号控制电液比例调平阀;且使该控制信号越过电液比例调平阀的一定比例的死区,从而使工作平台同步跟随主臂变幅动作。即在工作平台倾角PID闭环反馈的基础上,通过“事前控制”及“电液比例调平阀死区补偿”改善调平系统的迟滞现象,减小变幅起升初始动作下工作平台倾角的超调幅值,提高初始调平性能,其控制流程图如图4所示。
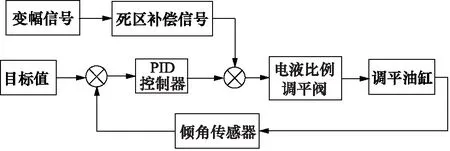
图4 控制流程图
3 仿真优化与整机验证
3.1 仿真优化
根据变幅、调平液压系统元件配置,建立含变幅信号前馈的调平电液系统仿真模型,如图5所示,在仿真软件中,设置各元件的相关参数,如表1所示。
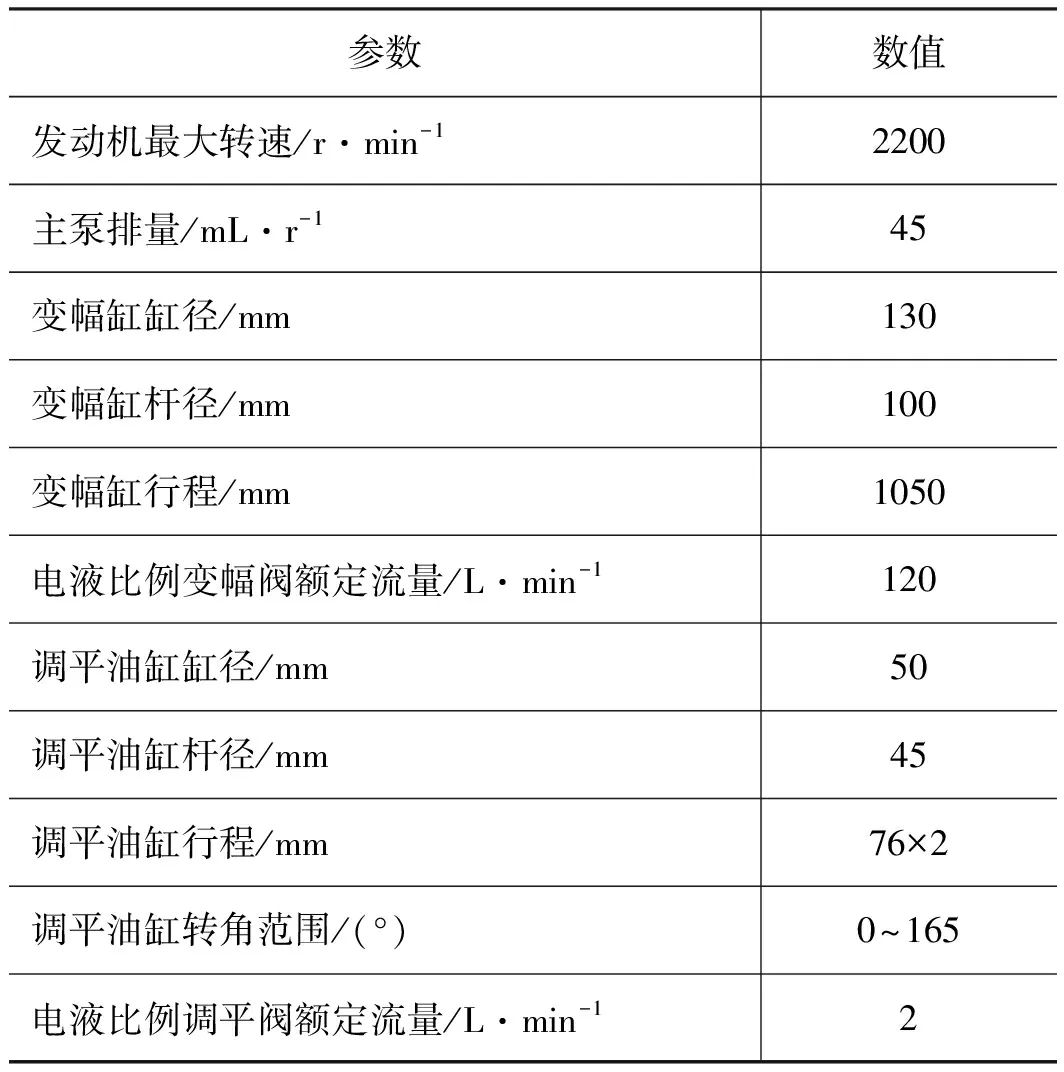
表1 变幅及调平系统仿真模型主要参数
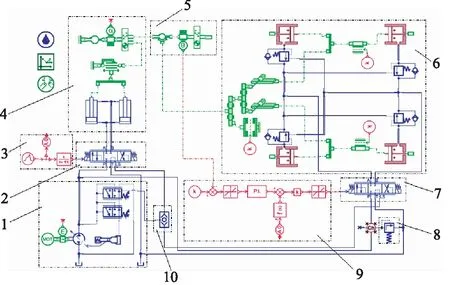
1.电机泵及油箱 2.电液比例变幅阀 3.变幅控制信号 4.变幅油缸组件 5.工作平台 6.调平油缸组件 7.电液比例调平阀 8.溢流阀 9.调平控制信号 10.梭阀
在仿真模型中,通过设置电液比例变幅阀的控制信号发送端A0与电液比例调平阀的控制信号接收端A0的通断,控制变幅前馈信号引入与否。当发送端A0和接收端A0断开,表示不引入变幅前馈信号,模拟原变幅及调平系统,即只含工作平台倾角闭环反馈;当发送端A0和接收端A0连通,表示引入变幅角度前馈信号,同时在电液比例调平阀的A0接收端通过设置合理的函数f(x),给定电液比例调平阀的死区补偿信号。
首先,校正原系统仿真模型的准确度,仿真工况保持与图2曲线的测试工况一致,输入电液比例变幅阀的控制信号控制主臂变幅动作,仿真输出主臂变幅角度、变幅油缸无杆腔压力以及工作平台倾角的变化量;然后,根据功率流原理建模,将仿真结果与测试结果对比,如图6~图8所示。

图7 变幅缸无杆腔压力仿真数据与实测数据对比

图8 工作平台倾角仿真数据与测试数据对比
由图6~图8可知,主臂变幅角度、变幅油缸无杆腔压力以及工作平台倾角的仿真曲线与测试曲线整体趋势一致,该仿真模型可以用于分析变幅起升时的调平性能。在此仿真模型的基础上,引入变幅角度前馈信号,将发送端A0和接收端A0连通;同时对比不同的死区补偿电流下工作平台倾角的超调量,其仿真结果如图9和图10所示。
图9为仿真对比只引入变幅前馈信号的工作平台倾角与原系统无变幅前馈信号的工作平台倾角,由图可知,工作平台倾角均从-1°开始调平,引入变幅前馈信号后,初始动作时,工作平台倾角的峰值由3.5°减少至2.3°,幅值降低了34%。
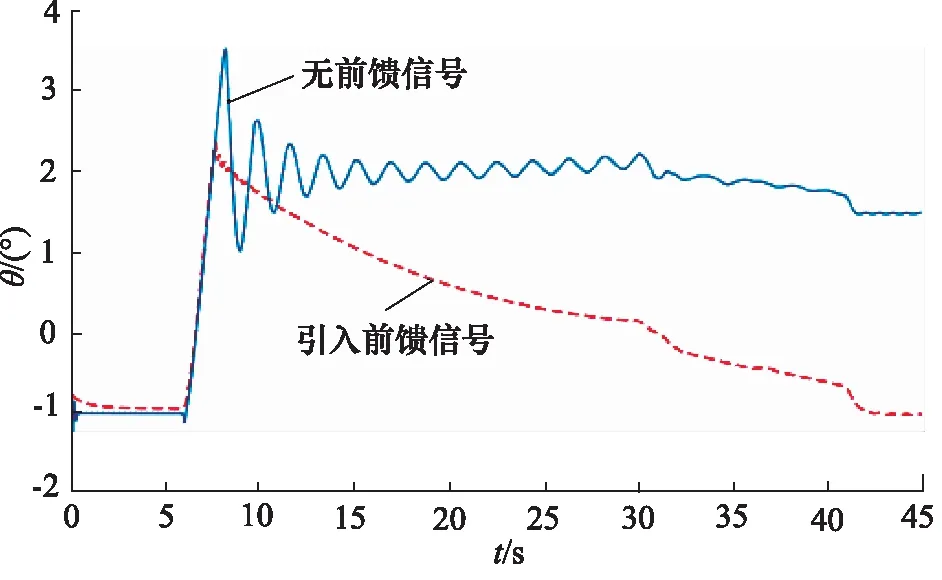
图9 引入前馈信号前、后的工作平台倾角仿真曲线对比
图10为引入变幅前馈信号,对比电液比例调平阀不同死区补偿量的工作平台的倾角。由图可知,死区补偿量分别为电液比例调平阀死区的40%,70%,100%时,初始变幅时,工作平台倾角的偏差分别为2.4°,0.8°,1.3°;当死区补偿量为100%时,工作平台出现过补偿。

图10 不同的死区补偿量下工作平台倾角仿真曲线对比
由此可知,在工作平台倾角闭环反馈的基础上,引入变幅前馈信号后,电液比例调平阀死区补偿电流设置太小,调平系统有延迟,工作平台倾角超调量仍然大;电液比例调平阀死区补偿电流设置太大,调平系统响应太快,易引起工作平台倾角的过补偿。因此,电液比例调平阀需设置合理的死区补偿值。
3.2 整机验证
根据该技术方案对此款消防车产品进行技术改进,在满足系统稳定时间下,结合原工作平台倾角闭环反馈,增加主臂变幅角度前馈控制,设置合理的电液比例调平阀死区补偿电流值,保持发动机转速、控制手柄开度及外载荷与图2曲线的测试工况相同,对主臂变幅进行整机测试验证。优化后的测试曲线如图11所示,主臂变幅初始角度φ为-12°,工作平台初始角度θ为-0.1°;第4.5秒主臂开始变幅,变幅角度开始增大,工作平台角度θ跟随主臂角度出现超调,第6秒时达到最大超调角度0.75°,第7秒时工作平台角度回调至0°并保持。变幅初始工作平台与水平面的夹角超调量由之前的3.8°减少至0.75°,调平效果显著。
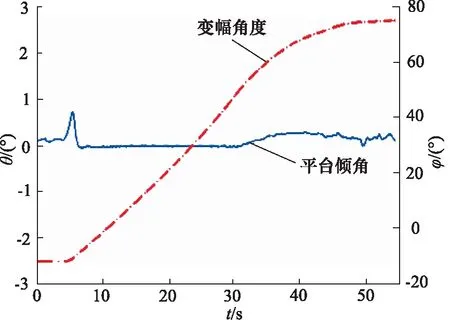
图11 优化后变幅起升时主臂和工作平台角度的测试曲线
4 结论
(1)针对高空作业消防车初始变幅起升时工作平台与水平面的夹角超调量大的问题,在工作平台倾角闭环反馈的基础上,增加变幅信号前馈及设置合理的电液比例调平阀死区补偿量,对电液比例调平阀进行“事前控制”,可有效改善电液调平系统的迟滞现象,减小变幅起升初始动作下工作平台与水平面夹角的超调幅值,提高调平性能;
(2)电液比例调平阀的死区补偿需设置合理的值,死区补偿值太小,调平系统仍有明显延迟、超调量仍大;死区补偿电流太大,易引起工作平台倾角的过补偿;
(3)该套仿真分析方法对高空作业车辆的电液系统的调平性能提升方面具有借鉴意义和参考价值。
