基于boosting 的区域停车场剩余泊位预测系统设计
2022-09-14李艺涵
李艺涵
(悉尼大学,悉尼新南威尔士州2027)
很多公共场所如医院、学校等,由于人口、建筑物密集,很难在现有建筑的基础上扩建停车场,因此如何有效地管理停车泊位是现代智能交通中缓解停车压力的重要措施。目前,停车管理系统中最大的问题是停车泊位信息不能有效发布,驾驶员无法远程获取车位的目标信息,大大降低了各个停车场的停车效率和泊位利用率。因此,设计停车场剩余泊位预测系统,及时发布泊位信息,可以方便有停车需求的驾驶员查询剩余泊位信息。
文献[1]提出基于优化LSTM 模型的停车泊位预测系统,通过构建LSTM 模型的上一层网络预测时间序列进行学习与训练,及时捕获剩余泊位信息,从而预测停车场的剩余泊位;文献[2]提出基于NB-IoT 技术和GA-BP 神经网络的车位预测系统,采用NB-IoT技术采集车位信息,并构建车位预测模型,预测未来短时内车位的变化趋势。然而,上述两种预测系统的诱导牌诱导效果不佳,缺少合理布设原则,导致预测精准度较低。面对该问题,设计基于boosting 的区域停车场剩余泊位预测系统。
1 系统硬件设计
区域停车场剩余泊位预测系统硬件结构由中心服务器、控制器、双向地磁检测传感器、计数修正手柄和配置计算机组成,如图1 所示。
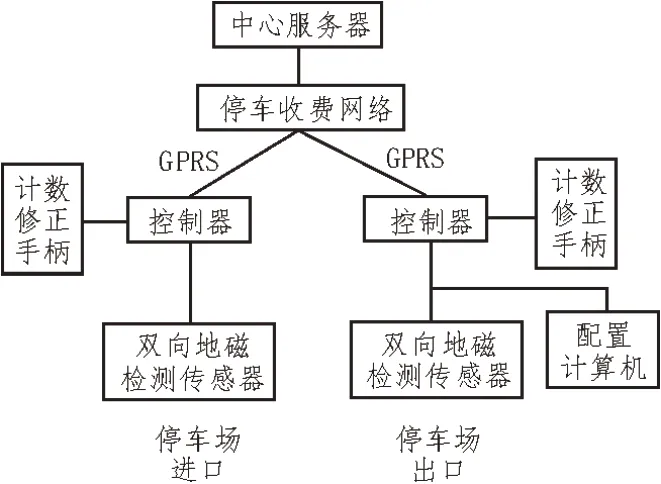
图1 预测系统硬件结构示意图
由图1 可知,在停车场出入口设置双向地磁检测传感器,用于检测车辆的通行信息;控制器负责控制双向地磁检测传感器进行数据传送,避免传输拥塞;计数修正手柄负责修正泊位预测误差;中心服务器通过网络收集停车场的车辆信息,并进行统计和显示[3-5]。
1.1 双向地磁检测传感器
利用STM32 作为主控芯片,结合HMC5843 传感器,研制双向地磁检测传感器,该传感器主要通过I2C 通信协议识别车辆通过时的环境磁场强度,实现对车辆的检测。由于双向地磁检测传感器采集到的地磁数据在车辆通过时会产生很大的变化,当车辆进入停车场后,背景磁场强于局部磁场,说明有车进入停车场[6]。在这种情况下,需要对车辆的速度和行驶方向进行识别,当背景磁场恢复到初始值时,说明车辆通过完成,并将信息包的检测结果传送给控制器。
1.2 控制器
控制器主要由无线接口、232 串口和485 串口组成,其结构示意图如图2 所示。
由图2 可知,ATMega1280 是控制器的主要处理芯片,并配备SIM300C 模块,集成GPRS 无线通信系统,使控制器接收信息包的过程更加稳定。另外,控制器配有电池,可在突然断电时继续保持稳定工作的状态,并具有为系统提供小容量数据存储的功能。
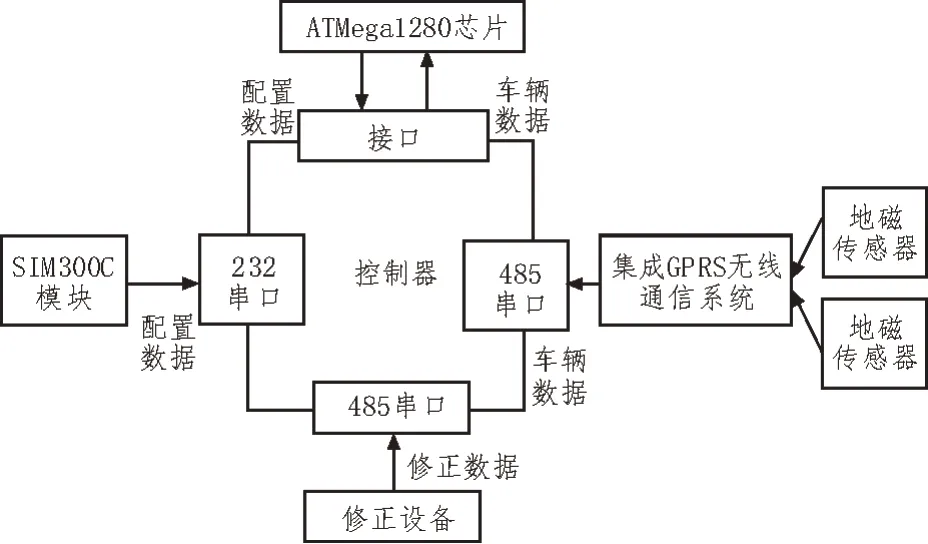
图2 控制器结构示意图
1.3 停车诱导子系统
1.3.1 信息采集子系统
信息采集子系统由监控装置、感测装置组成,监控装置负责监视诱导区域内的停车情况,感测装置负责感测停车场内的停车状态、车流量和车速信息[7-9]。
1.3.2 信息处理子系统
信息处理子系统对停车场的停车状态、车流、车速信息进行处理,并将这些信息转化成数据的形式发布给驾驶员,它能为停车需求状态预测、停车泊位等提供辅助服务[10]。
1.3.3 信息传输子系统
信息传输子系统主要由采集端、管理中心、发布端三部分组成,负责采集、处理和发布过程之间的信息交换。
1.3.4 信息发布子系统
根据诱导标志,信息发布子系统主要负责发布停车场的位置、停车泊位的使用情况以及周边道路的交通状况信息[11-12]。
2 系统软件部分设计
2.1 基于boosting的停车诱导距离计算
在系统硬件设计完成后,结合boosting算法,加大停车数据管理力度,研究停车场剩余泊位数据跟踪和检测差异性,计算差异值数据,建立以下数据计算公式:
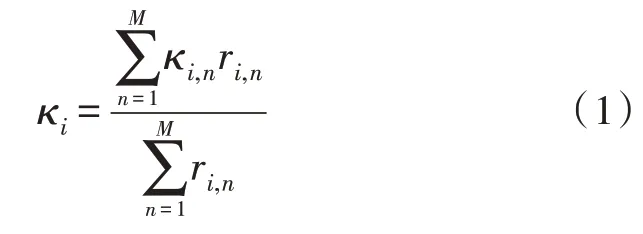
式中,κi,n表示差值数据参数,ri,n表示象征性数据跟踪检测指数,n表示操作的基础数据,i为方向角标[13-15]。
完成上述内部操作后,清除混乱的空间数据,构建内部调整系统,利用系统的中心调整性能来获取具有较大相关性的空间数据,并对并行boosting 算法进行标准化改造。
使用选定的指数参数建立预测模型,如式(2)所示:

式中,W表示泊位区间数据,T表示时间范围,N表示数据总量,η表示可操作泊位数据,μ表示调控系统数据。
驾驶员在A 视认点上已经找到了S 标志,从B 点开始读出标志的信息,到C 点就可以将标志内容全部读完,这个距离称为读标记距离[16]。看到标记后,作出判断动作,这种距离称为判断距离。然后,开始行动。这时车辆已经走到D 点,而动作点D 到动作结束的距离称为动作距离L,计算公式如下:

式中,v1表示接近车位的速度;v2表示容易发生车祸的速度;a表示减速时的加速度;h表示当前位置到目标位置的距离;d表示前置距离;l表示标志距离;L*表示倒车所需距离。
停车牌诱导标志信息处理流程如图3 所示。
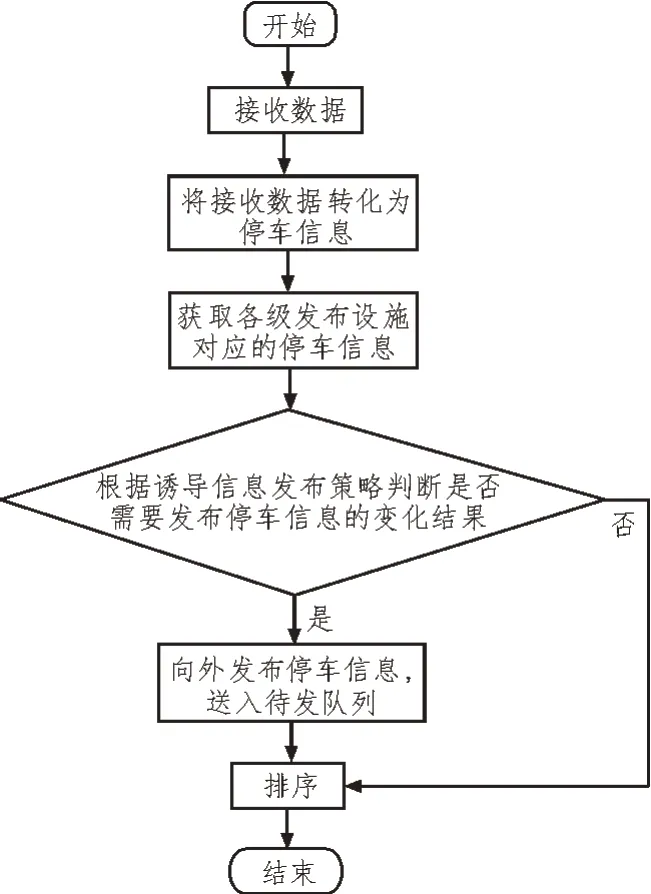
图3 停车牌诱导标志信息处理流程
由图3 可知,经过此处理流程,能够及时将停车场内部停车情况传送到停车场外部,为泊位预测提供信息支持。
2.2 泊位预测流程设计
结合停车牌诱导标志信息,设计基于boosting 的区域停车场剩余泊位预测流程,如下所示:
步骤一 数据准备:准备的数据包括已知停车场剩余泊位数目形成的训练集合,以及由预计停车泊位数目构成的测试集。
步骤二 数据检验:取得系统软件操作所需的内部数值,不断结合系统运行区内相关程度较高的停车场剩余泊位预测数据,并检验目标数据存在的合理性,构造数据检验公式,如式(4)所示:
式中,g表示目标数据空间占比系数,q表示数据合理性参数,φ表示数据相关程度数值。根据以上研究调整最终的数据操作状态,获取软件系统设计的关键信息参数。
步骤三 初始化权值:当进行初始化时,所有训练样本都被赋予相同的权重,因此有:

式中,m表示样本总数。
步骤四T轮训练:结合boosting 算法对样本集进行T轮训练,保证每次训练结束后,每个样本都具备较大权重,方便后续对剩余样本进行学习与训练,由此获取预测函数序列。
步骤五 计算该预测函数的错误率,如式(6)所示:

步骤六 重复上述步骤,直到获取最优迭代数据为止,并输出最终参数。
步骤七 将测试集中的预估停车场剩余泊位数以及最终的参数代入预测模型中,得到最终预测的剩余停车泊位数。
3 实 验
3.1 实验环境与数据
采集某一停车场区域的停车数据,生成停车场内部逻辑图,并上传到系统的服务端。该电子地图覆盖了泊位状态、实际地址等实时信息,可以作为泊位优化计算的辅助工具,停车场内部逻辑地图如图4所示。
由图4 可知,以某个停车场的7 个区域为例,分别是南一环A、B 区,东一环A、B 区,西一环A、B 区,北一环A 区,截至2018 年10 月份底,该市的停车场资源情况如表1 所示。
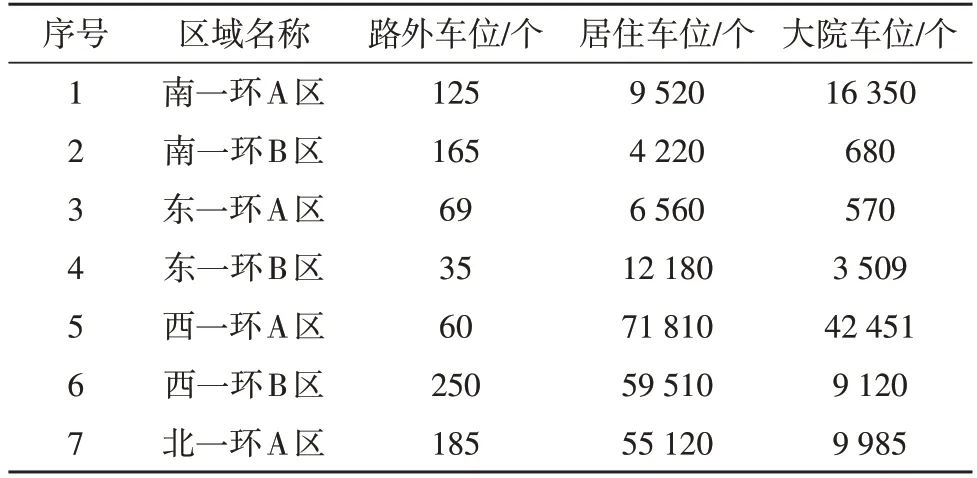
表1 停车资源调度表
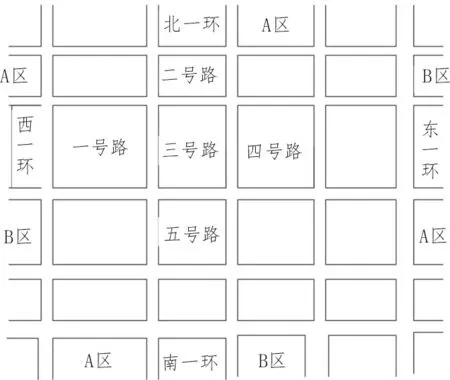
图4 停车场逻辑地图
3.2 实验结果与分析
停车场泊位使用率指的是一个时间段内的泊位情况,停车场泊位使用率实际数据统计如表2 所示。
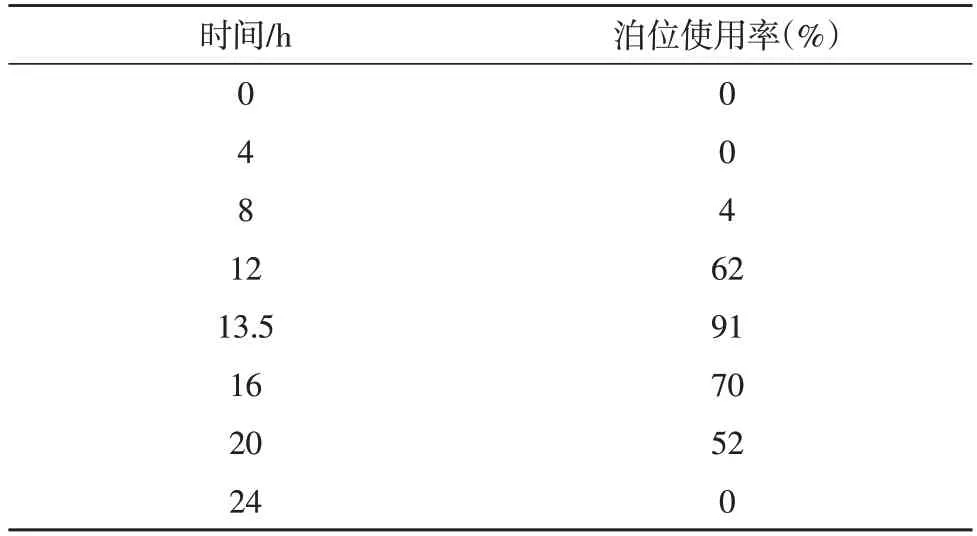
表2 停车场泊位使用率实际数据统计
根据表2 各个时间段的泊位使用率信息,能够对比分析基于优化LSTM 模型、NB-IoT 技术和GABP 神经网络的车位预测系统和基于boosting 的预测系统的泊位使用率预测情况,如图5 所示。
由图5 可知,使用基于优化LSTM 模型,在12 h左右的泊位使用率达到最高,为72%,且在6~8 h 内,出现了高达将近16%的泊位使用率,与实际数据不一致;使用NB-IoT 技术和GA-BP 神经网络的车位预测系统,在10~11 h 泊位使用率达到最高为71%,且在4~8 h 内,出现了高达将近56%的泊位使用率,与实际数据不一致;使用基于boosting 的预测系统,在13.5 h 左右的泊位使用率达到最高,为91%,与实际数据一致。
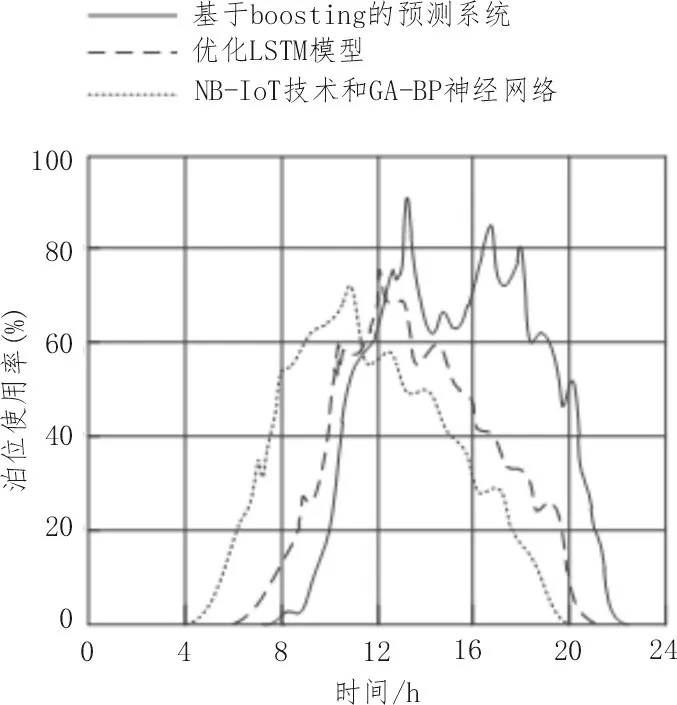
图5 3种系统泊位使用率预测情况对比结果
通过上述分析结果可知,该系统泊位使用率与实际数据一致,说明该系统的泊位预测结果较为精准,实际应用的价值较高,可以帮助司机实现高效停车。
4 结束语
在分析固有区域停车需求的基础上,结合boosting算法,提出并设计区域停车场剩余泊位预测系统。利用停车场历史数据进行分析和研究,建立停车场剩余泊位预测模型。该模型考虑多种因素,具有良好的预测效果,将该系统应用于车位信息发布中,能够有效提高泊车效率,避免停车场没有空余车位,或者空余车位未被发现的情况。