自制教具杠杆力臂测量仪
2022-08-13新疆维吾尔自治区克拉玛依市第十六中学834014杜建华
新疆维吾尔自治区克拉玛依市第十六中学(834014) 杜建华
“杠杆”一节是“机械运动”的开篇,对引导学生从生活走向物理、从物理走向社会有着重要意义。杠杆作为简单机械之一,是复杂机械的最小单元,杠杆平衡条件的运用,让人类有了征服自然、挑战自我的勇气。《义务教育物理课程标准(2011年版)解读》中写到:“对杠杆平衡条件的要求,要既包含过程,又包含结果”[1],然而笔者通过课堂教学发现,对于杠杆在水平位置下的平衡条件的运用,学生都可以掌握,但学生对于杠杆在非水平位置下的力臂的理解还存在着认知盲区[2]。针对学生的这一认知盲区,笔者制作了“杠杆力臂测量仪”,运用此教具进行教学,有助于学生对杠杆的整体性理解。
1 教材分析及制作意图
“杠杆”一节中涉及到力臂的部分为:“动力臂:从支点O到动力F1作用线的距离l1;阻力臂:从支点O到阻力F2作用线的距离l2”,且在之后的探究杠杆的平衡条件实验中只进行了杠杆水平条件下的平衡条件的探究,对杠杆非水平位置下动力与阻力位于同侧、异侧等情形未进行探究。造成此现象的原因:一方面是绝大多数学校探究杠杆平衡条件的仪器,只在杠杆的下方设计了可挂钩码的小耳,上方未设计小耳;另一方面是对力臂定义中的“作用线”和“距离”较为抽象,缺少实验引导,学生无法在脑海中建构模型。笔者自制的杠杆力臂测量仪具有以下特点:①用可移动“十字”游标具体化作用线;②用带刻度磁吸标尺精准表示力臂;③用支点处的激光束具体化力臂。这一自制教具可以直观、全方位地体现不同条件下的杠杆力臂,激发学生求知欲望,补全学生知识盲点。
2 杠杆力臂测量仪的结构
杠杆力臂测量仪是采用实验室常见仪器改进得来的,其结构如图1所示,具体包括:磁吸式底座、上下两层可移动小耳的杠杆、带可移动“十字”游标的磁吸刻度标尺、可360°旋转的激光发射器。

图1 杠杆力臂测量仪的结构示意图
3 杠杆力臂测量仪的优点
(1)采用可磁吸式底座,既可以吸附在白板上,方便教师操作和学生观察;也可以拆下磁吸式底座,将仪器安装在铁架台上,方便学生进行实验。
(2)采用带可移动“十字”游标的磁吸刻度标尺将力的作用线具体化,可以准确读出力臂的具体数值。
(3)用可360°旋转的激光发射器进一步“图解”力臂是从支点到作用线距离的定义,加深学生对力臂的理解。
(4)使用上下两层可移动小耳的杠杆,既可以测量动力、阻力分布在支点同侧的力臂,也可以测量动力、阻力分布在支点两侧的力臂。
4 杠杆力臂测量仪的使用
在传统的探究杠杆平衡条件的实验教学中,绝大部分教师和学生按照教科书的要求进行实验探究。具体步骤:①调节杠杆两端的平衡螺母,使得杠杆水平并静止,此时杠杆处于平衡状态;②在杠杆左侧A点处挂上钩码,此时杠杆不平衡,在杠杆右侧合适的位置B点挂上同样数量的钩码,此时杠杆恢复平衡,测出从支点O到A的距离l1、从支点O到B的距离l2,记录数据;③改变杠杆左侧A点处挂上的钩码数目或A点的位置,重复步骤②,在杠杆右侧找出合适的位置和挂上合适的钩码,再次记录数据,重复操作几次;④根据数据,总结归纳得到杠杆平衡条件。在这个实验中学生对于杠杆平衡条件的结果及运用都可以掌握,但在探究杠杆平衡条件的过程中,学生对于杠杆在非水平位置下的力臂认知与测量存在盲区。因此,可将探究杠杆平衡条件实验增加以下几种情形:
(1)动力、阻力位于支点两侧水平位置的力臂测量;
(2)动力、阻力位于支点两侧非水平位置的力臂测量;
(3)动力、阻力位于支点同侧水平位置的力臂测量;
(4)动力、阻力位于支点同侧非水平位置的力臂测量;
(5)异形杠杆的力臂测量。
4.1 动力、阻力位于支点两侧水平位置的力臂测量
①将杠杆力臂测量仪固定在白板上,调节杠杆两端的平衡螺母,使得杠杆水平并静止,此时杠杆处于平衡状态。②在杠杆左侧任意一点A点处挂上一定数量的钩码(假设钩码对杠杆施的力F1为阻力),此时杠杆不平衡,将测力计挂到右侧合适的位置B点处并斜拉(杠杆处于水平位置),杠杆恢复平衡,测出从支点O到A的距离l1,移动磁吸刻度标尺的“十字”游标,使之与测力计斜拉方向重合(此时,B点和游标之间的连线具体化为动力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为动力臂,表示支点到动力作用线的距离),可直接从刻度标尺上读出距离l2,记录数据,如图2所示。

图2 第(1)种情形下的力臂测量
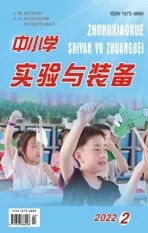
4.2 动力、阻力位于支点两侧非水平位置的力臂测量
①将杠杆力臂测量仪固定在白板上,调节杠杆两端的平衡螺母,使得杠杆水平并静止,此时杠杆处于平衡状态。②在杠杆左侧任意一点A点处挂上一定数量的钩码(假设钩码对杠杆施的力F1为阻力),此时杠杆不平衡,将测力计挂到右侧合适的位置B点处并斜拉(杠杆处于非水平位置),杠杆恢复平衡,移动磁吸刻度标尺的“十字”游标,使之与钩码重力方向重合(此时,A点和游标之间的连线具体化为阻力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为阻力臂,表示支点到阻力作用线的距离),可直接从刻度标尺上读出距离l1,如图3(a)所示;移动磁吸刻度标尺的“十字”游标,使之与测力计斜拉方向重合(此时,B点和游标之间的连线具体化为动力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为动力臂,表示支点到动力作用线的距离),可直接从刻度标尺上读出距离l2,记录数据,如图3(b)所示。

(a) (b)图3 第(2)种情形下的力臂测量
4.3 动力、阻力位于支点同侧水平位置的力臂测量
①将杠杆力臂测量仪固定在白板上,调节杠杆两端的平衡螺母,使得杠杆水平并静止,此时杠杆处于平衡状态。②在杠杆右侧任意一点A点处挂上一定数量的钩码(假设钩码对杠杆施的力F1为阻力),此时杠杆不平衡,将测力计挂到右侧合适的位置B点处并斜拉(杠杆处于水平位置),杠杆恢复平衡,测出从支点O到A的距离l1,移动磁吸刻度标尺的“十字”游标,使之与测力计斜拉方向重合(此时,B点和游标之间的连线具体化为动力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为动力臂,表示支点到动力作用线的距离),可直接从刻度标尺上读出距离l2,记录数据,如图4所示。

图4 第(3)种情形下的力臂测量
4.4 动力、阻力位于支点同侧非水平位置的力臂测量
①将杠杆力臂测量仪固定在白板上,调节杠杆两端的平衡螺母,使得杠杆水平并静止,此时杠杆处于平衡状态。②在杠杆右侧任意一点A点处挂上一定数量的钩码(假设钩码对杠杆施的力F1为阻力),此时杠杆不平衡,测力计挂到右侧合适的位置B点处并斜拉(杠杆处于非水平位置),杠杆恢复平衡,移动磁吸刻度标尺的“十字”游标,使之与钩码重力方向重合(此时,A点和游标之间的连线具体化为阻力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为阻力臂,表示支点到阻力作用线的距离),可直接从刻度标尺上读出距离l1,如图5(a)所示;移动磁吸刻度标尺的“十字”游标,使之与测力计斜拉方向重合(此时,B点和游标之间的连线具体化为动力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为动力臂,表示支点到动力作用线的距离),可直接从刻度标尺上读出距离l2,记录数据,如图5(b)所示。
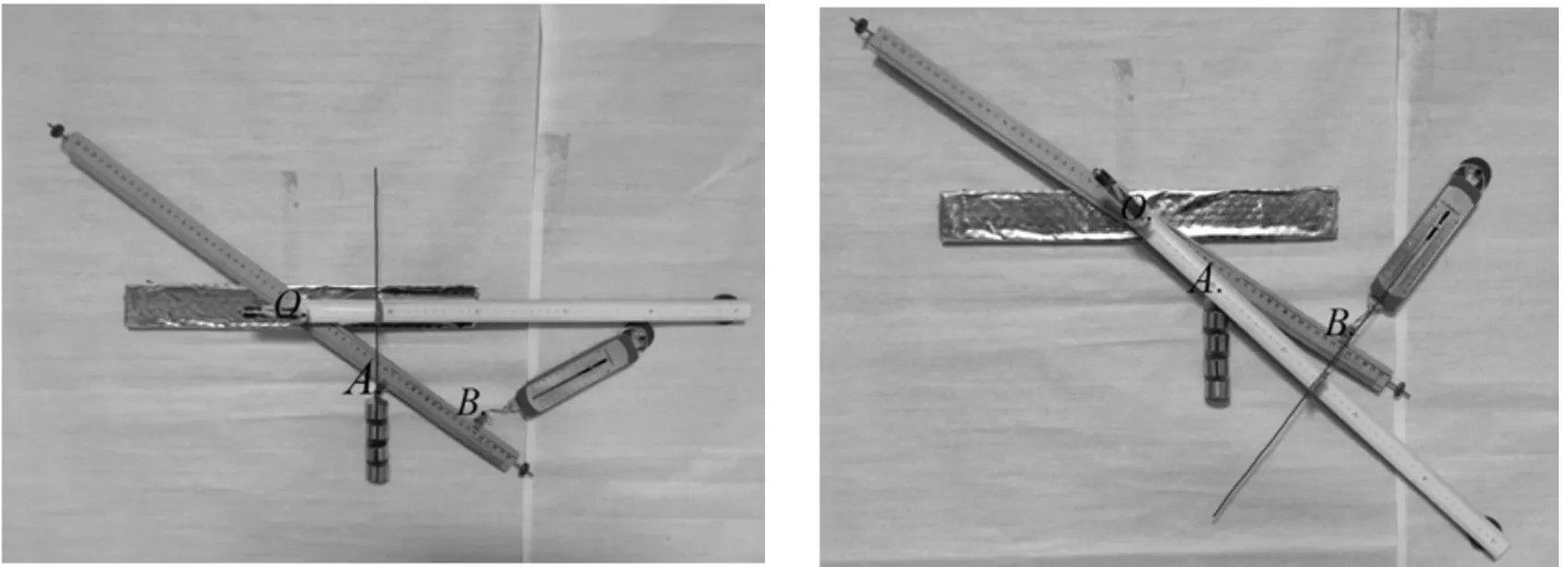
(a) (b)图5 第(4)种情形下的阻力臂测量
4.5 异形杠杆的力臂测量
①将杠杆力臂测量仪固定在白板上,调节异形杠杆,使得杠杆水平并静止,此时杠杆处于平衡状态。②在异形杠杆支点一侧任意一点A点处挂上一定数量的钩码(假设钩码对杠杆施的力F1为阻力),此时杠杆不平衡,将测力计挂到另一侧或者同一侧合适的位置B点处并斜拉(杠杆处于非水平位置),杠杆恢复平衡,移动磁吸刻度标尺的“十字”游标,使之与钩码重力方向重合(此时,A点和游标之间的连线具体化为阻力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为阻力臂,表示支点到阻力作用线的距离),可直接从刻度标尺上读出距离l1,如图6(a)所示;移动磁吸刻度标尺的“十字”游标,使之与测力计斜拉方向重合(此时,B点和游标之间的连线具体化为动力作用线),支点处的激光束沿着带刻度标尺照射到游标处(激光束具体化为动力臂,表示支点到动力作用线的距离),可直接从刻度标尺读出距离l2,记录数据,如图6(b)所示,图7(a)、7(b)为异形杠杆的同侧力臂测量。
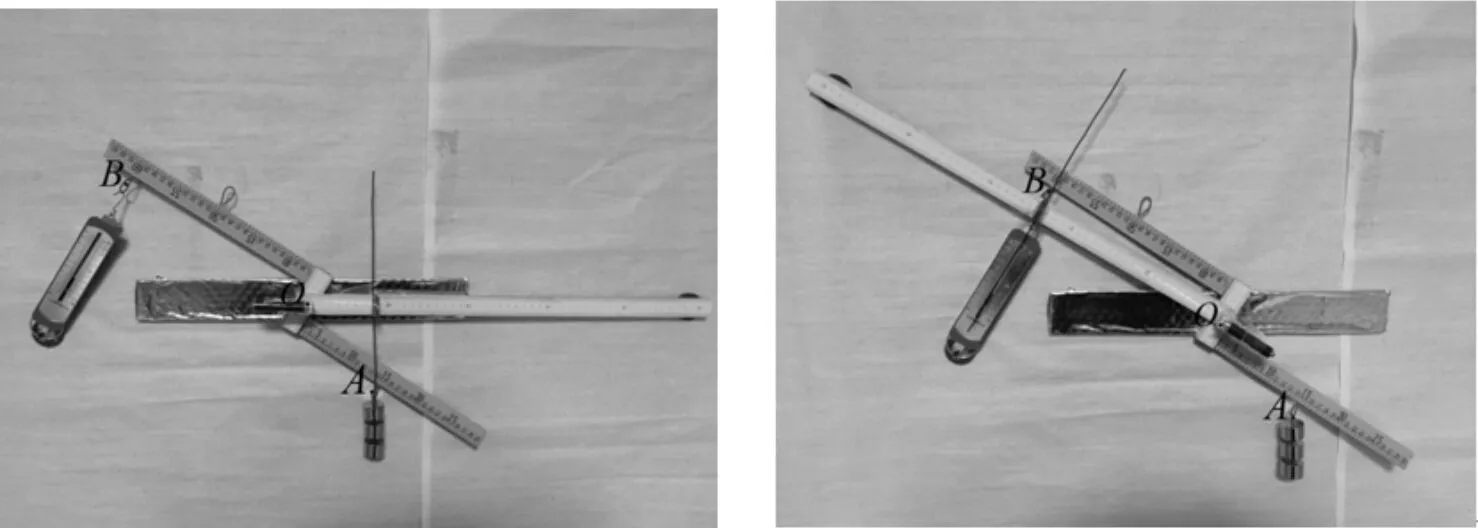
(a) (b)图6 第(5)种情形下的力臂测量(力臂在支点两侧)

(a) (b)图7 第(5)种情形下的力臂测量(力臂在支点同侧)
通过自制教具——杠杆力臂测量仪对杠杆在非水平位置下的力臂以及异形杠杆的力臂进行测量,重建并加深学生脑海中对于力臂这一知识点的认知,使得学生对杠杆平衡条件的认知,既包含了过程,又包含了结果。