基于FPGA控制的车载光能收集系统
2022-06-10冯梓浩
冯梓浩
(广西师范大学,广西桂林,541004)
0 引言
随着新能源的发展,太阳能发电得到了广泛的市场关注[1]。但现有市场主要的产品均为太阳能发电板安装在不同的装置,由于气候的因素,实时的光照各不相同,因此大多数相关发电效率不稳定[2]。本文基于一种高性能Stratix III FPGA芯片控制的移动式车载光能收集系统,可实时根据收集到的数据计算出收集太阳能的最佳位置。
1 系统的整体结构
本次项目主要对基于FPGA控制的车载光能收集系统进行研究设计,将FPGA为主控制器,由于FPGA相对于单片机具有并行试行等优点,在实时数据采集与发送数据之间不存在时间差,也就是说系统的收发可以变为一体化,减少中间因为收集采集和发送所损失的太阳能位置信息。同时针对于现有的太阳能板运输车一般采用锂电池作为动力,充电时间一般较长,严重影响车辆的使用效率,本系统车辆将车顶改为太阳能电池板,能够实现边工作边充电,但是传统太阳能电池板的安装位置大多是固定的,而这种方式不能够根据太阳的位置,进行调整太阳能电池板的照射角度,从而导致充电效率较低,所以存在不便于调节角度的缺陷,为此我们提出新型太阳能板,解决以上提出的问题。
本系统由光照传感器模块、电机模块、GPS模块、FPAG主控、光伏太阳能板、升压模块和储能电池组成。如图1所示。

图1 系统总构成
2 系统的软硬件总体
2.1 系统总体功能
基于FPGA的车载光伏收集系统其主要作用为通过各模块间的数据进行角度调整从而使光伏太阳能板的转化效率提高。由GPS模块采集车速信息以及光照传感器模块采集光所在的方位反馈至FPGA主控芯片中进行处理并发送控制电机调整光伏太阳能板的控制指令,使其面向光强度高的一方;光伏太阳能板将转化的电能通过升压模块升压到可以电动汽车需要的伏数后,将其储存在储能电池中,待电动汽车使用时将其释放。
2.2 硬件电路设计
2.2.1 主控制器
要做到快速的同时处理GPS以及光照传感器模块反馈的实时数据并发送控制指令,需要一个高算力的芯片;本次采用的芯片为Stratix III高端芯片,该芯片具有优异的特性、极高极快的算力、具有业界最佳的信号完整性和设计安全性、能够在逻辑阵列模块 (LAB) 级进行编程符合本次模拟设计。
2.2.2 光伏太阳能板
移动式太阳能收集板,包括调节箱,所述调节箱内腔底部的左侧固定安装有电机,所述电机的输出端固定连接有螺杆,所述螺杆的右端通过轴承与调节箱的连接处转动连接,所述螺杆的外表面螺纹连接有套筒,所述套筒的顶部固定连接有驱动板,所述调节箱的顶部滑动连接有活动板,所述驱动板的顶部贯穿调节箱且与活动板的连接处固定连接,所述调节箱顶部左侧的前后位置均固定连接有定位板,两个所述定位板相对一侧的顶部均通过轴承转动连接有转轴,两个所述转轴相对的一端固定连接有承载板,所述承载板的顶部固定安装有太阳能电池板本体,所述活动板顶部的前后位置均通过活动轴活动连接有推板,所述推板远离活动板的一端通过活动轴与承载板的连接处活动连接。
图2中:1、调节箱;6、活动板;7、定位板;8、转轴;9、承载板;10、太阳能电池板本体;11、推板;14、滑轨;16、安装板;17、挡板;18、橡胶垫。所述调节箱的正面通过螺丝固定连接有挡板,所述调节箱的底部粘接有橡胶垫。

图2 光伏太阳能板
2.2.3 光照传感器
本次设计采用BH1750光照传感器,该传感器具有功耗小,体积小,支持两个IIC地址,最高支持400kbps的传输速率,对于本次模拟设计来说足矣,如图3所示。
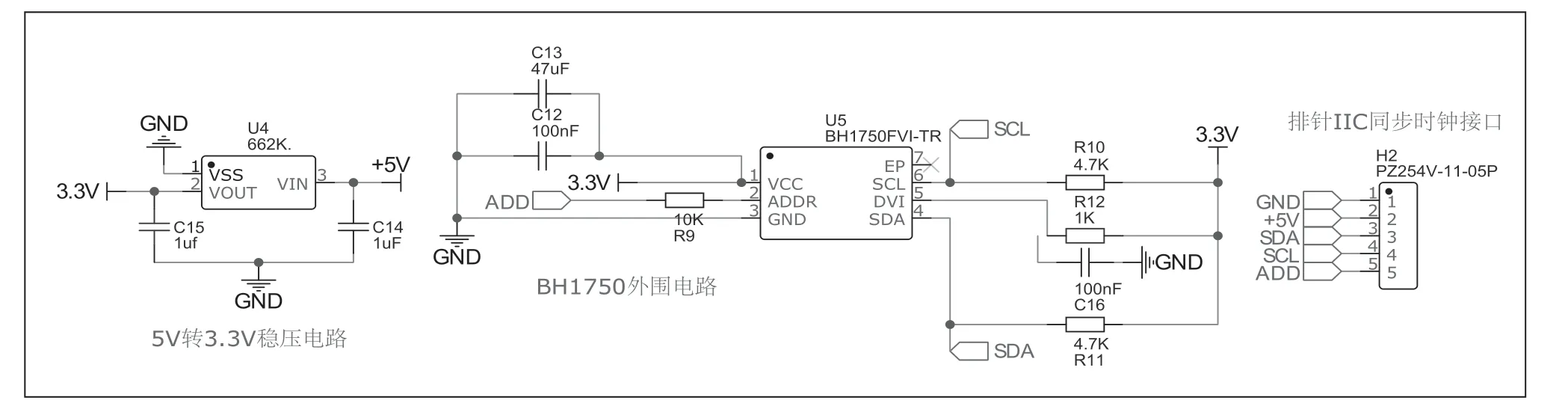
图3 光照传感器模块
两个IIC地址可以通过排针上面的地址引脚ADDR来选择,接GND时器件地址为0100011 ,接VCC时器件地址为1011100。通过SDA数据信号线和SCL时钟线与主控芯片相连进行数据传输。
2.2.4 GPS模块
本次模拟设计定位部分采用E108-GN01高集成度多模卫星定位导航模块,原理图如图4所示。

图4 GPS模块
本次设计将GPS模块作为从机与FPGA主板通过串口进行通讯,端口间使用安卓数据线进行连接,上电时V-RF亮起代表天线正常工作,使用有源天线来增强信号,定位成功后IPPS开始闪烁,此时便可进行串口通讯。使用TXD来发送数据至FPAG主板进行处理,RXD接收来自FPGA主板的数据并解析其指令来进行相应工作,数据发送成功后TXD串口指示灯便亮起,以此来完成从机与主机之间的通讯。
2.2.5 升压模块
本次模拟设计采用96片太阳能电池组件,单片电压约为0.4~0.7V,总电压约在48V左右,在升压模块中经过线圈升压到可以启动电动车的伏数,通过整流桥整流成单向的脉动直流电,脉动直流电经过滤波电路变成平滑的直流电,滤波后再经过稳压器稳压,得到基本不受外界影响的直流电源输出,如图5所示。

图5 升压模块
2.2.6 电机模块
本次模拟电机设计使用BTN7970 电机驱动板,具有四路通道输出,可实现电机正反转,双路 PWM 波控制,具备电流反馈稳定输出和检测电机工作状态的功能,部分电路原理图6所示。

图6 电机模块
2.3 软件程序设计
2.3.1 主程序运行流程图
系统运行时,先进行初始化,接着主控芯片开始接收GPS定位模块以及光照传感器实时采集数据并进行分析,并发送指令通过偏差信号控制电机调整光伏太阳能板的位置。具体运行程序如图7所示。

图7 主程序流程图
2.3.2 子程序运行流程图
(1)光照传感器模块
本次模拟设计ADDR引脚是接在GND上,且使用的模式为连续测量高分辨率模式。在程序上,先发送上电命令(0x01)并初始化;接着进行连续测量:写入起始信号(ST),之后写入器件地址和读写位(本次使用的器件地址0100011),然后写入应答位,再而写入测量的命令(0x10)并应答,最后写入结束信号(SP);测量结束后进行数据读取:写入起始信号(ST),接着器件地址和读写位,之后是应答位,紧接着接收1个字节的数据SDA引脚从输出改成输入,接收结束后写入结束信号(SP)。如图8所示。

图8 光照传感器模块子程序流程图
(2)GPS模块子程序流程图
GPS接收器利用多普勒效应计算车的前进速度,通过卫星进行准确的三维坐标定位并进行测速,开始时读取接收机伪距数据进行求导得出多普勒观测方程,获得方程单差后计算G矩阵利用最小二次方求得未知数据并使其与实际数据的误差平方和最小,根据误差去进行校正;当定位收敛误差小于0.001时,更新接收机位置并返回到计算G矩阵,否则输出数据至FPAG主板,该数据为当前车速。

图9 GPS子程序流程图
(3)电机模块
主控芯片将分析完后的数据产生一个控制信号去控制电机来转动太阳能板。程序设计如图10所示。

图10 电机模块子程序流程图
3 结论
本文的移动式车载光能收集系统,不仅在一定范围内能够最大效率收集太阳能,并且系统自身消耗能量较少,通过GPS和传感器的相互配合能获得更多的电能,满足日常驾驶的能源需求。
