基于STM32的智能驾驶头盔系统设计与实现
2022-06-10庄初鹏龙诺春杨建平陈浩涛黄睿
庄初鹏,龙诺春,杨建平,陈浩涛,黄睿
(广东白云学院 电气与信息工程学院,广东广州,510450)
0 引言
中国是电动车和摩托车拥有量最多的国家之一,电动车和摩托车作为最受欢迎的便捷交通工具,它们在带来便利的同时,频繁出现的交通事故也是一个社会痛点。随着“一盔一带”的推行和头盔佩戴率的上升,智能头盔的种类呈现高速发展趋势。现有如“基于STM32单片机的骑行者智能头盔系统设计”[1]可以监测驾驶员体温、心率等身体状况、GPS定位功能;“基于Arduino的碰撞报警与监测智能头盔”[2]可以监测驾驶员监测体温、心率等身体状况,遇到碰撞等危险会发送求助信息给紧急联系人;“基于STM32 智能骑行头盔的设计”[3]实现骑行视频录制、GPS定位、音频播放、转向提示等功能。传统智能头盔仅是增加附加功能[4],少有针对驾驶安全方面的设计。本智能头盔将针对驾驶安全方面进行设计,经过交通事故因素分析[5-6],得出由个人主观失误导致发生事故主要有以下几点因素:驾驶时注意力不集中;弯道、转弯等路况没注意观察后方有无来车;出现紧急情况时反应时间长、刹车不及时。针对上述因素,该头盔设计实现以下功能:使用激光雷达PLS-P400监测前方物体距离,结合毫米波雷达DM-19捕获物体靠近速度,经过软件算法判断是否会发生碰撞危险;毫米波雷达DM-19监测左后方、右后方来车;通过姿态传感器JY901实时监测驾驶员驾驶状态。利用语音模块JR6001播放系统提示语音词条。拥有前、后及两侧等各方检测功能。“驾驶安全智能头盔”补充电动车、摩托车安全性能短板,对于电动摩托车事故的减少有重要意义。
1 系统总体设计
为了减少头盔本身的重量以及提高传感器工作的稳定性,系统采用一个主机两个从机工作模式,主机从机之间采用2.4G频率无线通信,硬件的安装位置如图1所示。头盔为主机,负责连接从机、姿态分析、语言提示。安装于车头的传感器为从机1,负责判断前方是否发生碰撞危险、与主机通信。安装于车尾的传感器为从机2,负责监测后方来车、与主机通信。系统组成图如图2所示。主控芯片为STM32,主机中姿态分析传感器作为输入端,震动器和语音模块作为输出端,无线通信模块作为信息输入和信息输出端。从机1中毫米波雷达和激光雷达作为信息输入端,从机2中毫米波雷达作为信息输入端。

图1 硬件位置示意图

图2 系统组成框图
2 硬件设计
2.1 头盔(主机)硬件结构
硬件结构示意图如图3所示,主要由喇叭、震动器、蓝牙多媒体模块、语音模块JR6001、无线通信模块NRF24l01-01S、姿态传感器JY901[7]、主控芯片STM32F103RCT6构成。姿态传感器检测到不正确驾驶姿势时,会触发语音模块做出相应的语言提示。无线通讯模块接受到前后端传感器发送的报警信息时也会触发相应的报警和提示,同时可以发送相应的指令给从机。蓝牙多媒体模块独立于报警系统,可以连接蓝牙设备。电路接线如图4所示,姿态传感器JY901连接到串口2,语音模块JR6001连接到串口3,无线通信模块NRF24l01-01S连接单片机定义的6个SPI通信I/O口。
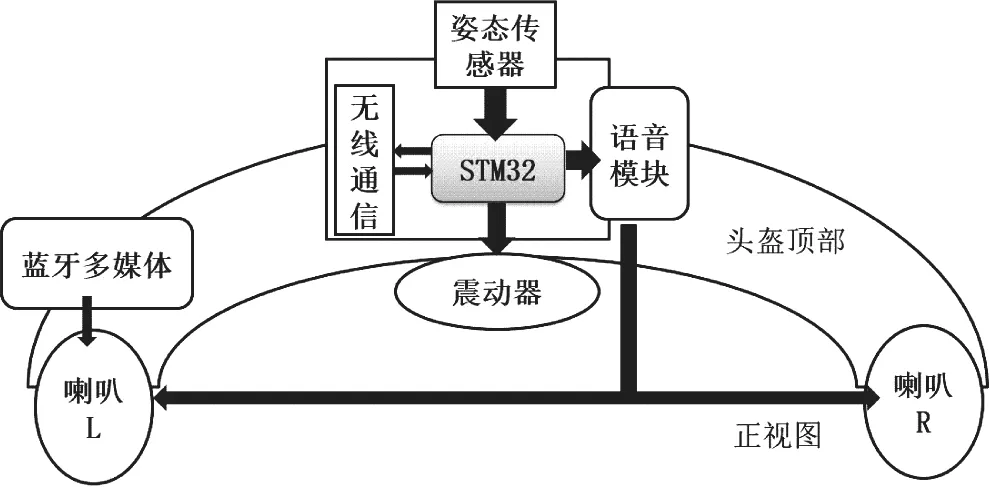
图3 主机硬件结构示意图

图4 主机模块与单片机连接图
2.2 从机1硬件结构
从机1主要由激光雷达PLS-P400、毫米波雷达DM-19、无线通信模块NRF24l01-01S、主控芯片STM32F103C8T6构成,硬件结构如图5所示。激光雷达获取前方物体的距离数据、毫米波雷达监测前方物体靠近的速度,经过主控芯片相应的算法分析是否会发生危险。相应的信息通过无线通讯模块发送信息到主机中,由主机发出相应的语音提示或者警报,同时也可接受主机发送过来的校准指令。电路接线如图6所示,激光雷达PLS-P400连接到串口2,毫米波雷达DM-19连接到串口3,无线通信模块NRF24l01-01S连接单片机定义的6个SPI通信I/O口。

图5 前向传感器硬件结构图

图6 从机1模块与单片机连接图
2.2.1 激光雷达PLS-P400原理
激光雷达原理示意图如图7所示,激光发射器的发射端发出一束经过系统编译的脉冲激光[8],发射的激光遇到物体时会有一定的反射率,反射的激光虽然会受物体的影响,但是经过编译的脉冲信息可以直接被识别,可以区于环境噪声,最大减少了环境噪声影响。激光接收端接收经过物体表面调制的脉冲后,分析被调制之后的签名,从中准确计算出二者的飞行时间t,已知光速c,推出距离D的计算公式:。模块参数如表1所示,引脚连接单片机对应接口。

图7 激光雷达原理示意图

表1 激光传感器引脚参数表
2.2.2 毫米波雷达DM-19原理
毫米波雷达测速原理[9]是利用发射电磁波遇到移动的物体,物体把电磁波回传之后接受到变化的频率,产生多普勒效应[10]来判断物体的位移。毫米波雷达发射频率为f;接收到的物体反射回波频率为f±fp(其中fp为多普勒频率[8]);目标的相对速度v的关系为(其中c为光速);由此得(其中,,为发射电磁波的波长);安装方位和测量距离的对应关系如图8所示。模块参数如2表所示,对应引脚连接单片机对应接口。

图8 DM—19安装角度和测量距离的对应关系

表2 毫米波雷达引脚参数表
2.3 从机2硬件结构
从机2主要由电池、毫米波雷达PLS-P40、无线通信模块NRF24l01-01S、主控芯片STM32F103C8T6组成,硬件结构如图9所示。毫米波雷达获取左右后方车辆靠近的速度数据,经过主控芯片的算法分析来辨别来车情况,处理后的信息通过无线通讯模块发送信息到主机中,由主机发出相应的语音提示或者警报,同时也可接受主机发送过来的校准指令。接线如图10所示,毫米波雷达1连接到串口2,毫米波雷达2连接到串口3,无线通信模块NRF24l01-01S连接单片机定义的6个SPI通信I/O口。

图9 后向传感器硬件结构图

图10 从机2模块与单片机连接图
3 软件设计
3.1 系统总体逻辑设计
系统软件逻辑流程如图11所示,系统软件主要有语音提示系统、无线通信系统、姿态分析函数、速度和距离分析函数。主机和从机都有独立的MCU,各自独立的处理系统,主机与两个从机之间使用无线通信。前传感器读取前方距离和靠近速度经过算法处理,若需要报警则通过无线模块向头盔主机发送报警信息。后传感器获取后方物体靠近速度,经过算法处理判断后方来车,若需要报警则通过无线模块向头盔主机发送报警信息。头盔主机接受报警信号后,系统触发相应语音提示信息。姿态经过算法分析,检测到不恰当姿态时触发语音模块播报相应语音,震动器为辅助提示用,由芯片接MOS管驱动。

图11 总体逻辑示意图
程序流程如图12所示,系统开启后等待主机与从机连接,连接成功后同时开始监测姿态、碰撞预警、后方来车等程序,其中满足触发条件会进入语言播放程序,如果没有及时调整回正确驾驶状态,会触发震动报警程序。

图12 系统程序流程图
3.2 模块的数据分析
3.2.1 姿态传感器数据分析
姿态检测使用串口通信(USART),通信数据包位16进制,数据表如表3、表4所示,数据来源模块官方资料(维特智能JY901 姿态角度传感器)。

表3 姿态分析角速度输出

表4 姿态分析角度输出
角速度计算公式:

角度计算公式:

温度计算公式:

3.2.2 毫米波雷达数据分析
模块使用串口通讯(USART),返回数据说明: 返回字符串“v (km/h) is xx++++”: 检测到正在远离的目标,速度为 xx km/h。返回字符串“v (km/h) is xx----”: 检测到正在靠近的目标,速度为 xx km/h。直达目标离开雷达的有效监测范围。速度的值在字符13位14位,将字符类型的数字转化为整型数字即可(单位km/h),通过判断第15至16位字符是“+”或“-”来确定目标正在远离或靠近。
3.2.3 激光雷达程序设计
激光测距雷达通信协议是构建在串口通信协议基础之上的应用层协议,协议最大帧长度为 8字节,使用小端格式。数据包结构如表5所示,数据来源模块官方资料(派欧机电-激光雷达PLS-P400)。

表5 激光雷达数据包结构
Bytes:表示字节个;Key:功能配置位;Value:数据位。
4 结语
本文设计的“驾驶安全预警头盔”没有车辆类型的限制,只要驾驶人把头盔戴上,在车上安装好传感器分块,可以便捷的安装在任何车辆上,不需要对车辆进行改装。主、从机使用无线通信工作方式,各部分独立运行,保证运行速度同时减少相互干扰。部分传感器安装于车上,增加稳定性、减少头盔的重量。使用姿态传感器监测驾驶员头部状态,发现不正常驾驶状态时及时警报提醒驾驶员,并带有语音提醒、无线通信等功能。前传感器使用激光雷达可探测远距离物体,毫米波雷达监测速度结合算法提前预警碰撞的发生。后传感器使用两个毫米波雷达结合算法检测后方来车。设计实现了电动车、摩托车小型车的后方来车提醒,碰撞预警等驾驶安全辅助功能,同时还能监测驾驶状态,减少因驾驶员驾驶状态不佳而导致的事故,具有较大的实际应用价值。
