琼州海峡影响船舶通航的雨雾气候风险动力学仿真
2022-06-10王发根胡甚平胡潇月
王发根, 胡甚平, 胡潇月, 谢 莹
(上海海事大学 商船学院,上海 201306)
0 引 言
琼州海峡是我国沿海水上交通的重要水道,是交通运输部划定的“六区一线”水上安全重点监管区域。随着水上运输业的不断发展,沿海航路的船舶流量日益增加,琼州海峡水域已成为我国水上交通最繁忙的海域之一,存在着较大的通航风险。该海域经常出现雾、雨水和台风等天气,易引发能见度不良和船上雷达工作效率不佳等现象,使船舶的安全航行受到影响。因此,研究能见度不良对琼州海峡船舶通航风险的影响,对进一步提升船舶海峡通航的安全性具有重要意义。
近年来,受限水域船舶通航风险受到了研究人员的广泛关注。陈伟炯等运用基于CRITIC法改进的突变级数法构建航道通航环境评价模型,克服了评价过程中主观决策的局限性。孟贝贝等借助Reason模型对通航安全因素进行了辨识,运用熵权模糊模型对港区航道通航安全进行了整体评价。孔宪卫等基于船舶操纵模拟,结合模糊数学理论建立了桥区水域通航风险评价模型,对桥区水域通航风险进行了分析评价。WANG等运用数据挖掘技术,在FP-growth算法的基础上,探讨了受限水域船舶通航风险各变量之间的潜在关系,揭示了引发内河船舶海上事故的主要风险因素。SUN等基于多层次分析法模糊评价模型对内河船舶航行的安全性进行了综合评价。 陈毕伍等基于动态船舶领域,通过挖掘船舶动态数据和事故数据,建立了珠江口通航风险评估模型,得到了船舶通航风险综合指数。覃盼等利用结构方程模型(Structural Equation Modeling, SEM),结合实地调研数据,构建了坝区船舶通航安全理论关系模型,提出了风险演化的3个阶段划分,揭示了风险演化的路径。刘清等基于系统动力学理论构建了长江干线宜昌段的船舶通航风险耦合度模型,分析了各因素之间的耦合关系及其对事故发生的影响。HE等通过建立基于智能专家数据分析的系统动力学模型,分析了船闸水域船舶航行的风险演化机制,识别了影响船闸水域船舶安全航行的关键因素。系统动力学模型被证明能有效表达系统内部各因素之间的动态反馈作用,在船舶通航风险评估中能起到明显的创新效果。
此外,能见度不良条件下的受限水域船舶通航风险研究也取得了一定的进展。TAYFUN等基于气象站的水文资料,采用多种机器学习方法对伊斯坦布尔海峡的能见度进行了评估,为能见度不良条件下的海峡通航提供了安全保障手段。张静等运用蒙特卡洛(Monte-Carlo,MC)模型对不同能见度等级下的事故数据进行了仿真实验,基于由小样本数据扩充的数据库分析了在0~12 km能见度范围内,不同等级能见度不良条件下的通航风险分布特征。由上述分析可知:已有的受限水域通航风险研究大多将能见度不良作为一个静态的评价对象,缺少对通航风险时空变化过程的评价;同时,已有研究在分析能见度不良的情况时,通常只考虑雾带来的影响,忽略了多种天气状态并存的情况。因此,需讨论不同天气状态下,能见度不良对通航风险的影响。
本文针对琼州海峡的通航安全性,通过对通航风险各影响因素之间的因果关系进行梳理,构建船舶通航风险体系的系统动力学因果关系图和动力学模型,对能见度不良对琼州海峡船舶通航风险的影响进行动力学仿真,以期完善琼州海峡船舶通航的安全管理,为船舶通航安全研究提供参考。
1 琼州海峡船舶通航风险
1.1 琼州海峡船舶通航风险成因
通航风险是船舶航行过程中多种因素共同影响和相互作用下损失发生可能性与损失程度的组合。多种因素共同作用下的船舶通航风险会严重影响船舶通航的安全性,琼州海峡处于热带区域,承载着交通功能,其各影响因素之间的相互作用和影响程度更加明显。从系统工程理论的视角分析琼州海峡的船舶通航风险,可知其风险成因主要有以下几点:
1) 琼州海峡处于海雾多发海域,海雾天气导致能见度不良,自然风险增加给驾驶人员的安全驾驶带来不利影响。
2) 由于处于热带区域,天气多变,可能导致通航环境发生突变。例如,当第一型冷锋天气出现时,若锋前暖空气不稳定,锋线附近可能会出现积雨云和雷阵雨天气,并伴随封面雾的产生。雾与雨共生会对船舶设备的安全运行及驾驶人员操作和组织管理的有效性产生影响。
3) 鉴于琼州海峡具有交通功能,其南北向和东西向的船舶流量较大,通航密度较大,航向复杂度较高,存在较高的通航风险。
4) 琼州海峡船舶通航系统内部多种因素相互耦合、相互促进,使琼州海峡的整体通航风险处于较高的水平。
1.2 海峡船舶通航风险影响因素和作用方式
海峡船舶通航风险的影响因素众多,一般涉及人、船、环境和管理等4个方面,其中环境因素一直是比较敏感和不确定的因素之一。实践表明,能见度不良对海峡水域船舶通航风险的影响比较显著。能见度不良主要有雾和雨、雾共生2种情况。海峡上方的雨云会严重影响岸基和船基雷达对物标的探测能力,进而影响人对周围交通态势的感知水平和VTS(Vessel Traffic Service)对航道船舶的管理效率。雨、雾天气对通航风险的影响最终会演化为对人员、船舶、航道环境和通航管理风险的影响。
由此可知,基于船舶通航安全系统的行为与内在机制之间存在紧密的相互依赖关系,系统各因素之间存在由环环相扣的行动或决策规则构成的网络关系,即动力学结构。以系统理论为基础,运用系统动力学方法,通过问卷调查和查阅相关文献,结合琼州海峡的实际情况,构建琼州海峡船舶通航风险体系的系统动力学因果关系图,见图1,其中:“+”表示正循环;“-”表示负循环。由于雾与风不能同时存在,在研究琼州海峡船舶通航风险时,不将风列入自然风险因素集中。
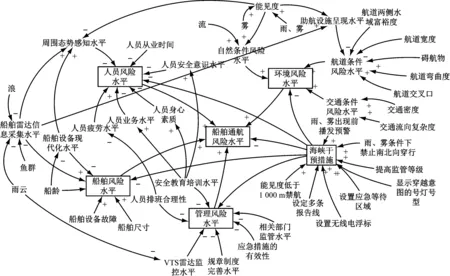
图1 琼州海峡通航风险动力学因果关系图
2 琼州海峡船舶通航风险成因影响系统动力学模型
2.1 船舶通航风险成因影响系统动力学建模方法
系统是因果机理的外在表现形式,系统动力学模型是一种能反映系统内部因果关系的机理性模型,可将抽象的因果机理具体化。船舶通航风险成因影响系统动力学模型构建流程见图2。
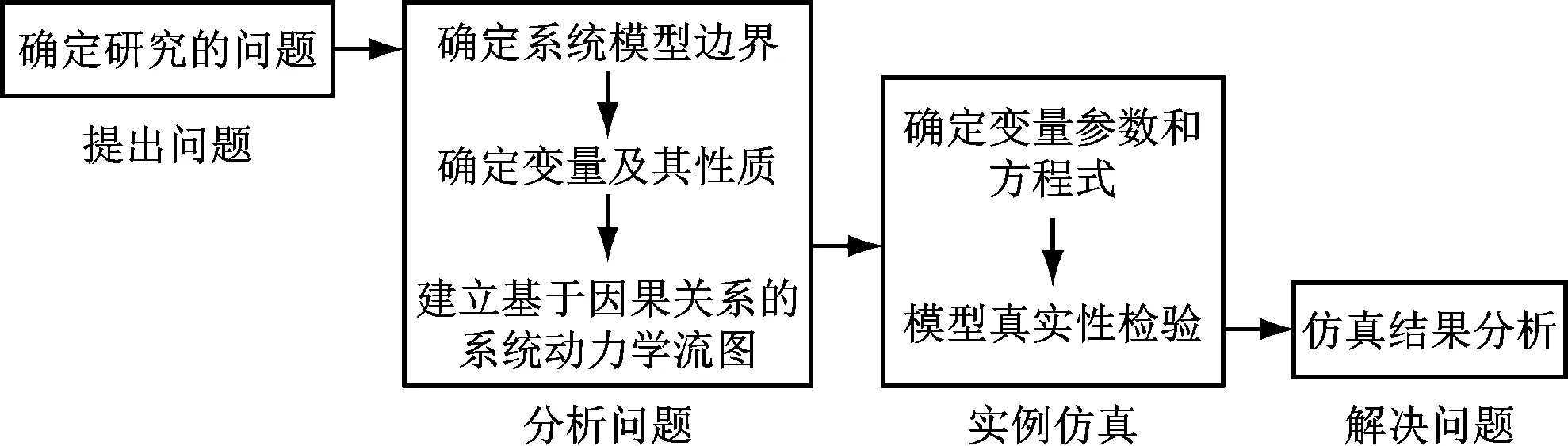
图2 船舶通航风险成因影响系统动力学模型构建流程
2.2 模型边界
对模型边界进行界定是构建动力学模型的重要环节,可简化系统模型,有利于试验的进行和对目标进行研究。系统边界分为内部边界和外部边界2种,其中:内部边界反映系统内部各因素之间的相互联系;外部边界体现系统状态受外部因素的影响。内部边界由系统动力学流图内部变量的流进和流出界定;外部边界结合船舶通航风险的一般性研究方法,基于时间维度界定。结合琼州海峡实际的船舶通航场景,确定系统边界如下:
1) 假设系统内部变量只受变量流进与流出关系的影响,不受其他因素的干扰;
2) 假设系统外部边界中只与时间存在关系的变量有交通密度、交通流向复杂度和流等3个。
2.3 模型变量及其性质
系统动力学模型变量集由状态变量、速率变量、辅助变量(系统中的信息量,有多种表达形式)和常量(决定系统结构的重要参数)组成,其中为~时段内的积累量与初始量的总和,其表达式为

(1)
式(1)中:()为时刻的流速,是微分性质的量,能清楚地反映流速随时间的变化趋势。
为能直观地观察各变量的因果机理关系,结合图1,以速率变量的方式呈现重要的节点变量,包括1个状态变量、10个速率变量、17个辅助变量和22个常量,见表1。
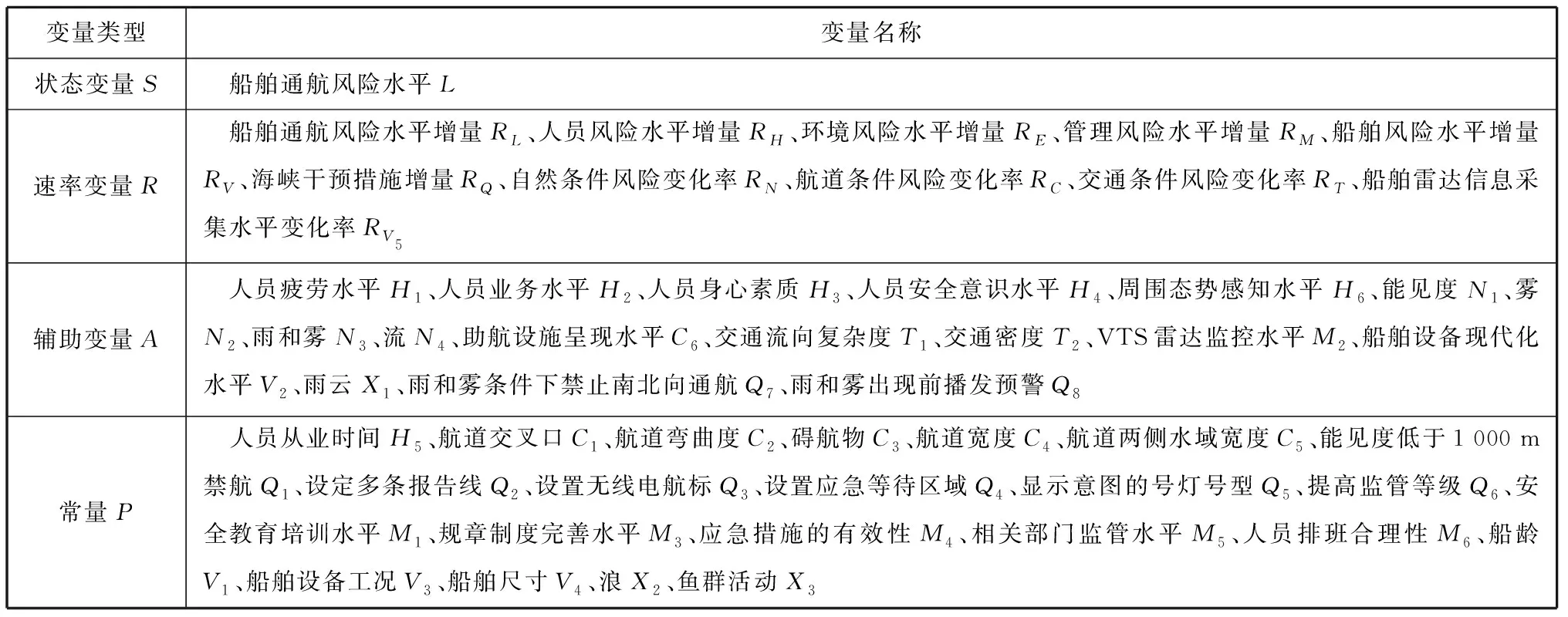
表1 琼州海峡船舶安全通航风险变量集
2.4 系统动力学流图
基于琼州海峡船舶通航风险动力学因果关系图,建立琼州海峡船舶通航风险系统动力学流图,见图3,其中、、、、和为控制变量。
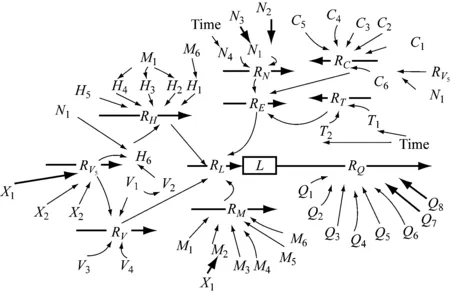
图3 琼州海峡船舶通航风险系统动力学流图
2.5 系统动力学模型中方程式的确定
在系统动力学模型中,不同变量的数学性质不同。各变量间的关系通过数学方程式表达。
1) 状态变量的计算公式为

(2)
式(2)中:为状态变量输入速率变量因素集的个数;为状态变量初值;为状态变量输出速率变量因素集的个数;为时长;为权重系数;为关联系数;和为速率变量。
2) 第个速率变量的计算公式为

(3)
式(3)中:为第个速率变量上一级速率变量因素集的个数;为第个速率变量上一级辅助变量因素集的个数;为第个速率变量上一级常量因素集的个数;、和为权重系数;为辅助变量;为常量。
3) 运用关联系数(来源于专家评价)计算的第个辅助变量的计算公式为
(4)
式(4)中:为与存在相关性的常量的个数;为与存在相关性的速率变量的个数;为关联系数;为初始量;为速率变量。
4) 控制变量用脉冲函数表征,即
=PULSE(,)
(5)
式(5)中:为作用开始时刻;为作用持续时长。
5) 交通密度、交通流向复杂度和流等外部边界变量的确定方式如下:
(1) 用海峡内在航船舶总量随时间变化的表函数表征交通密度;
(2) 用海峡内南北通航的船舶数量随时间变化的表函数表征交通流向复杂度;
(3) 用潮汐随时间变化的表函数表征流。
根据上述算法,确定琼州海峡的SD模型各变量的方程式见表2。
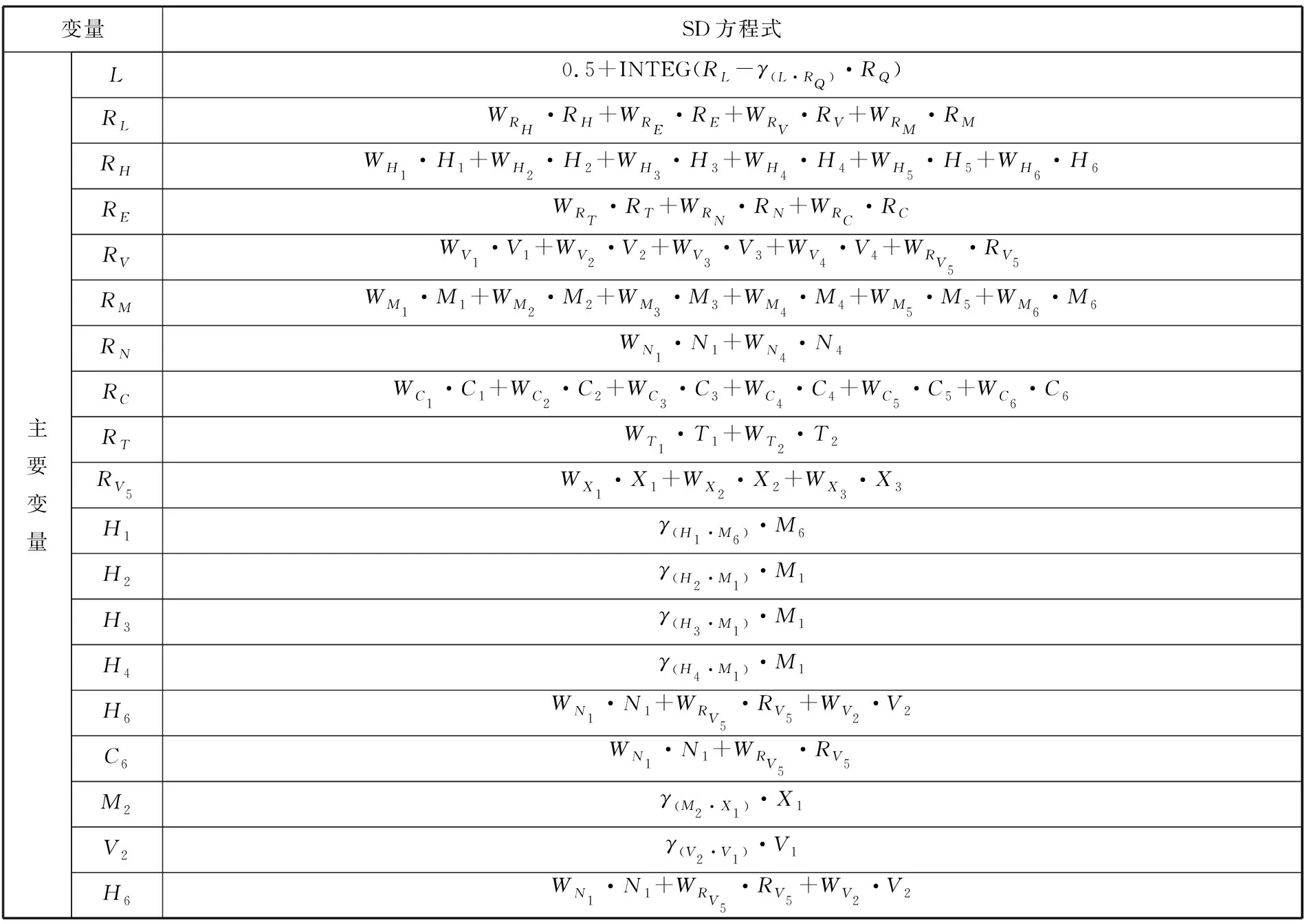
表2 琼州海峡的SD模型各变量的方程式
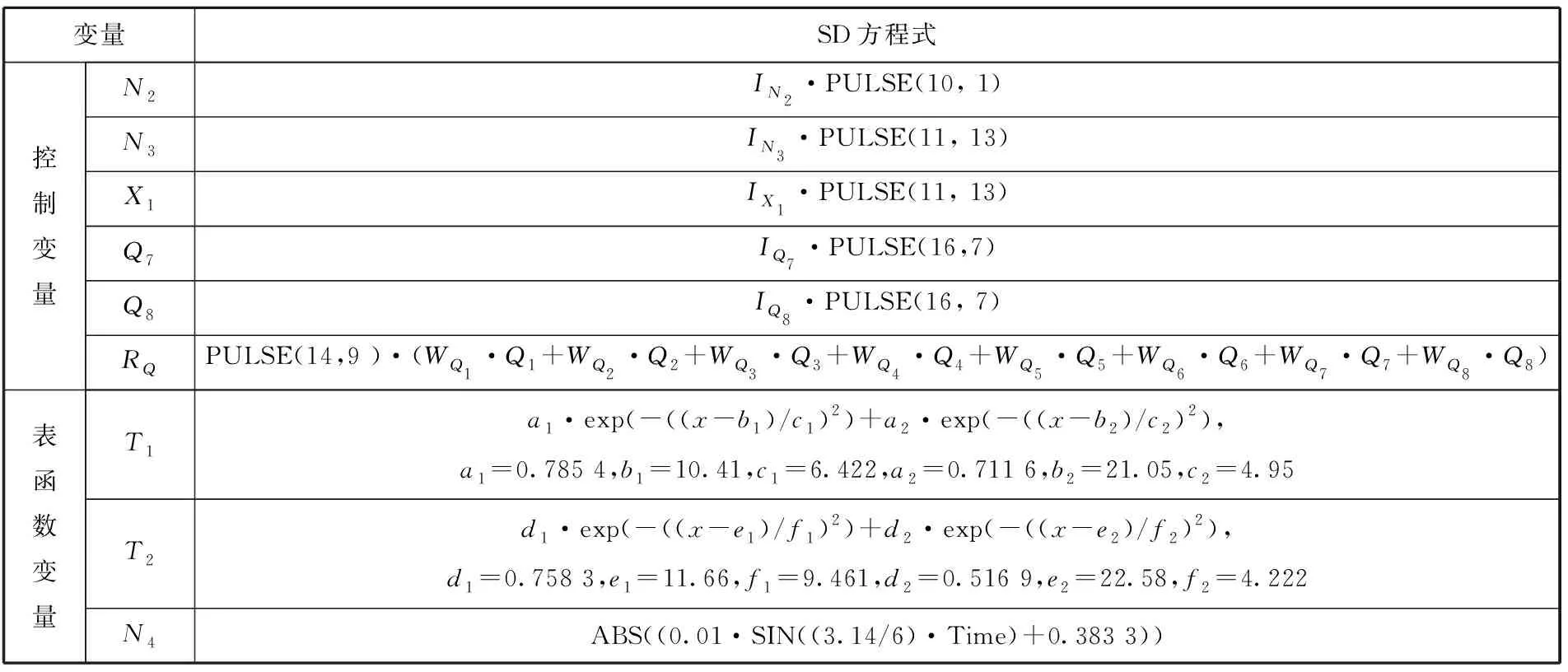
表2(续)
2.6 风险因素权重的确定
根据专家对各因素的风险程度的打分情况得到无量纲化的归一矩阵,见表3。为尽可能地贴近真实权重,运用主客观组合权重的方式求取综合权重,具体步骤如下:
1) 对采集到的数据进行熵和熵权计算,得到客观权重;
2) 采用模糊数学的方法对归一化矩阵求算术平均值,得到主观权重;
3) 运用组合权重公式确定各变量的综合权重。
表3 通航风险因素评价及分级标准
3 实例分析
3.1 场景描述和参数获取
下面以一艘排水量为2万t的集装箱船为例进行分析。该船在2021年6月5日06:00沿琼州海峡东界线自东向西穿越琼州海峡,见图4。为模拟船舶在琼州海峡遭遇的事件,在时间上清晰呈现风险的动态变化,设定模拟时间为06:00—24:00,步长为0.5 h。在模型中设置以下场景:
1) 雾在10:00产生作用,在11:00作用消失;
2) 雨雾和雨云在11:00产生作用,在24:00作用消失;
3) 海峡干预管理措施在14:00产生作用,在23:00作用消失;
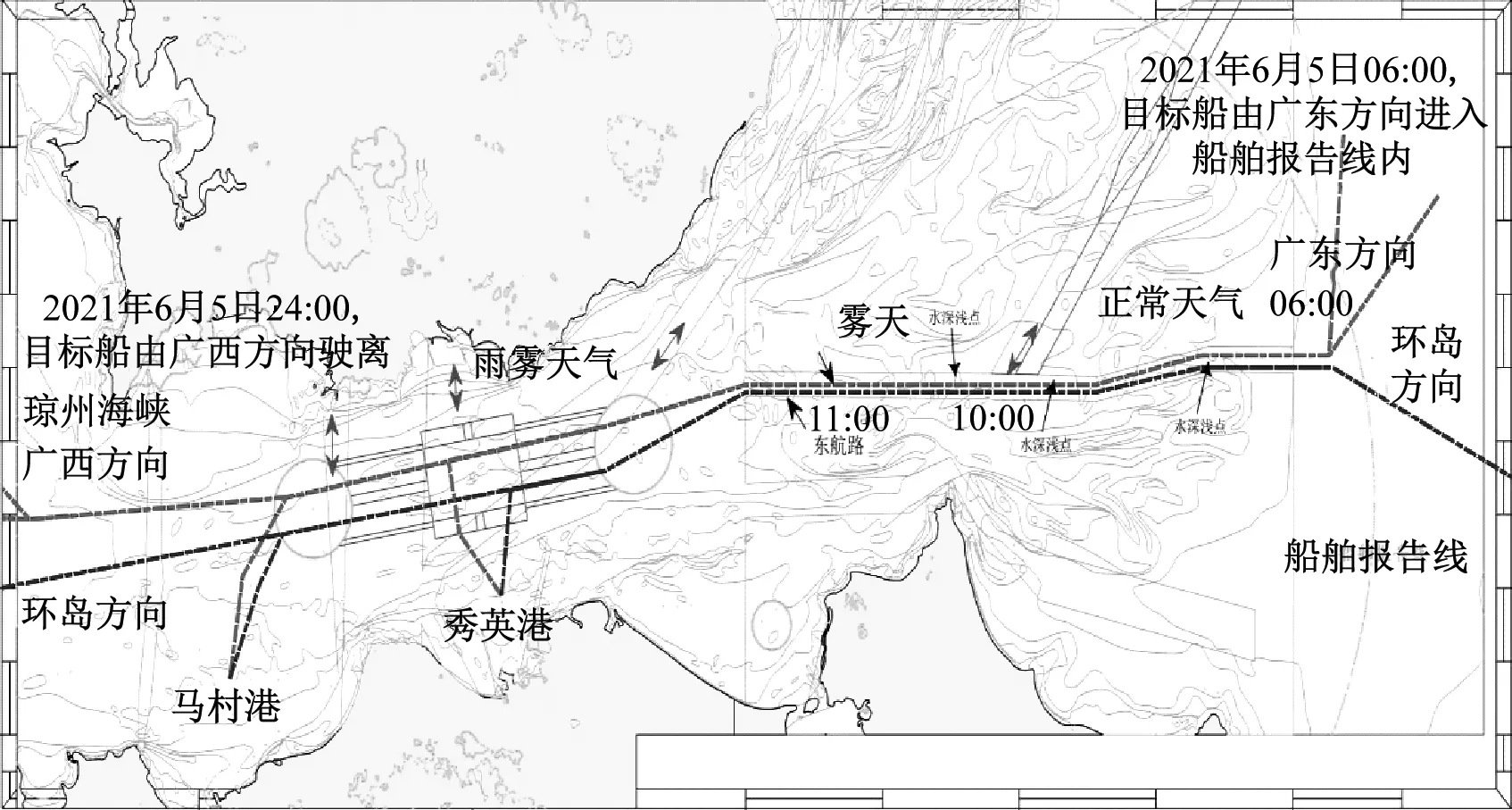
图4 琼州海峡及其航路概况
4) 雨雾天气预警和雨雾天气出现时禁止南北向穿行2项关键措施在16:00开始实施,在23:00取消。
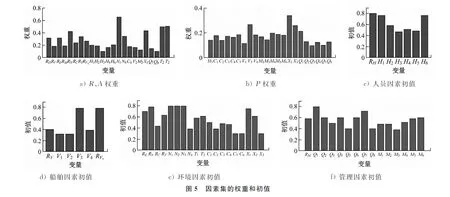
邀请40名业界人员(气象人员10名,船舶驾驶员10名,资深船长和海峡通航安全管理方面的专家各10名),采用专家打分法为定性变量赋值,结合琼州海峡的实际数据和历史气象资料确定计算初值。同时,由这些专家讨论得出各变量的综合权重。运用统计学方法,取高、中、低等3个值,参考去模糊化公式确定各变量初值与各因素间的关联系数。由于篇幅有限,此处省略计算过程,因素集的权重和初值见图5,其中纵坐标为变量初值。本文仅对变量参数的确定过程进行阐述,相关打分和统计表格不再罗列。
3.2 琼州海峡船舶通航风险仿真
运用系统动力学模型对琼州海峡的船舶通航风险水平进行模拟仿真,结果见图6。图6中的数据反映通航风险水平的分段线斜率(、和)的变化,表征风险上升的快慢:06:00—10:00,=0.356;10:00—14:00,=0.469;14:00—16:00,=0.359。船舶通航风险在这3个时段呈现为缓、快、缓的相对上升趋势。由于在10:00—14:00时段内出现了雾,琼州海峡的船舶通航风险发生了很大变化。人员风险增量和环境风险增量在10:00之后明显上升,持续4 h之后明显下降,与雾的产生和结束时段相对应。
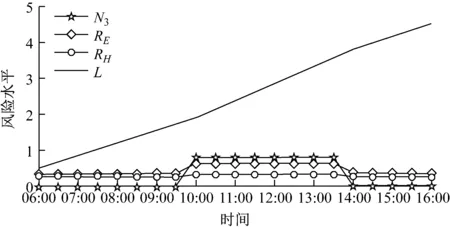
图6 船舶通航风险的客观演化规律
3.3 能见度不良条件下琼州海峡船舶通航风险分析
基于情景描述的过程,重新设置模型仿真步长和控制变量,运行模型,结果见图7。仿真结果表明:
1) 雾是影响船舶通航安全的重要因素。在10:00时出现雾,在10:00—11:00时段内=0.467,相较于正常环境下的06:00—10:00时段内=0.356,船舶通航风险的上升趋势较为明显。因此,雾的出现对船舶通航风险有显著影响。
2) 雨与雾共生天气是影响船舶通航安全性的重要潜在因素。在11:00时,雾消失,雨与雾共生天气出现,=0.508。由此可见,当雨与雾共生天气出现时,相较于仅有雾出现时=0.467,船舶通航风险的上升趋势更为明显。由此可知,雨与雾共生天气对船舶通航风险的影响比雾大。雨与雾共生天气的出现对人员风险子系统产生了叠加影响。这是由于雨和雾对能见度产生了影响,使人员对周围态势的感知水平下降;同时,雨云对雷达的工作效率产生了影响,增加了人员对周围态势的感知水平下降的程度。鉴于雨云是船舶雷达局部系统的组成部分,未将其列入环境风险子系统中,未能体现环境风险的叠加。
3) 采取安全干预管理措施是航道安全管理的关键。在14:00时,海峡干预管理措施介入,在14:00—16:00时段内,=0.102,相对于,船舶通航风险水平的上升趋势明显减缓,表明在应对通航风险时采取干预管理措施很有必要;在16:00时,2项应对雨与雾共生天气的关键性措施介入,在16:00—23:00时段内,=-0.049,通航风险水平开始呈现下降趋势,表明在应对重要的影响因素时要采取关键性措施;在23:00时,取消海峡干预管理措施,在23:00—24:00时段内,=0.495,通航风险水平再次呈现相对快速的上升趋势,再次验证了有效实施海峡干预管理措施是应对通航风险的关键。
4) 相较于雾对船舶通航系统的影响,雨与雾共生天气对船舶通航风险的影响体现在人、船、环境和管理等4个方面,多出了船舶和管理2个因素。这是由于雨云对雷达的工作状态产生影响,增加了船舶通航风险;同时,雨云对岸基雷达的工作状态产生影响,使VTS无法清晰地掌握所有船舶的实时动态,影响了航道的管理效率,增加了管理风险。
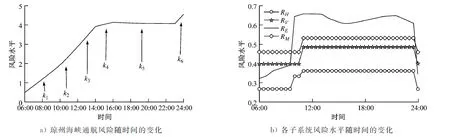
图7 琼州海峡船舶通航风险演化过程
3.4 仿真结果讨论
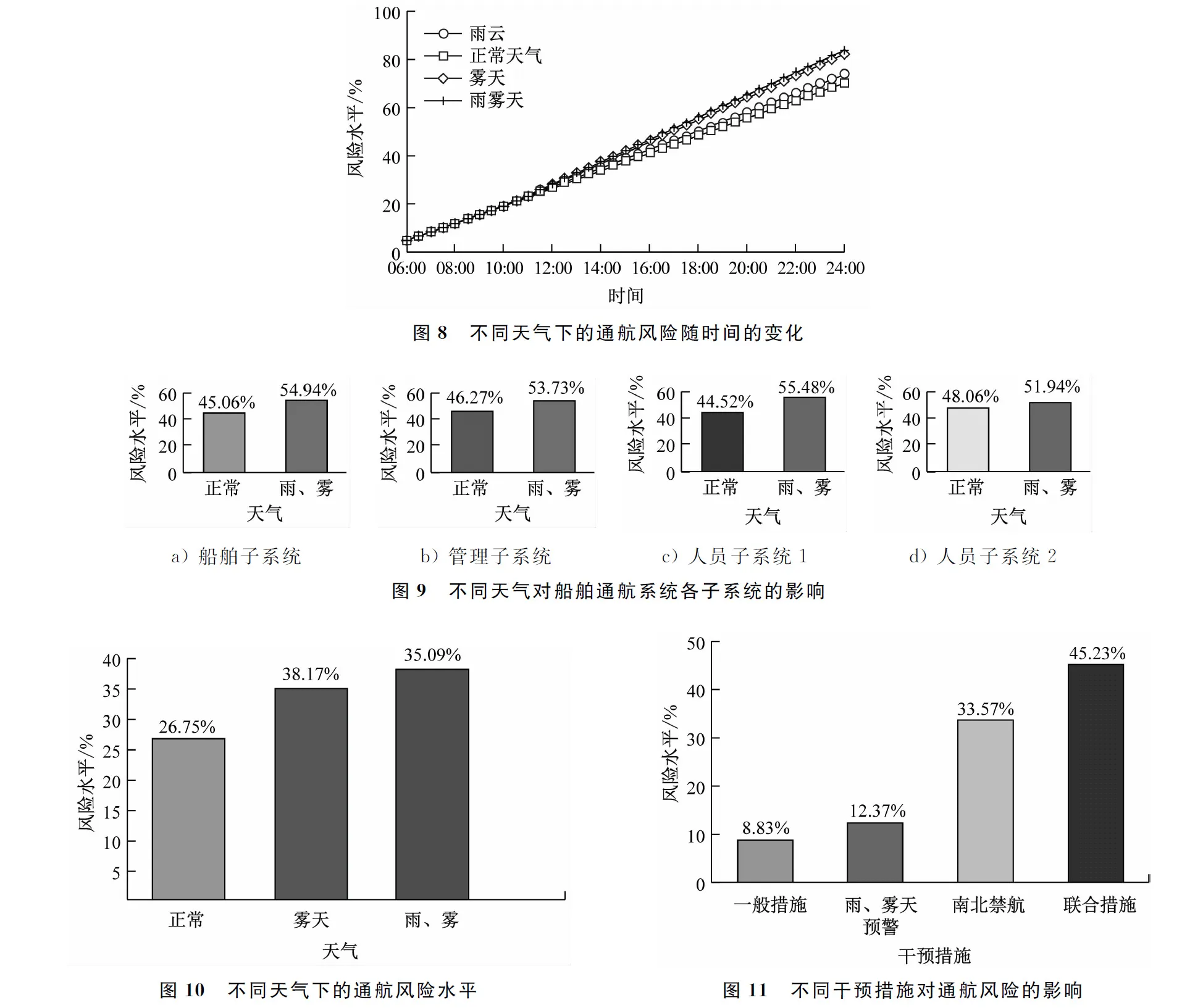
通过多次运行模型,对不同的情景进行仿真,并对所得结果进行整理和对比,结果见图8~图11。由图8~图11可知:
1) 雨云对船舶通航风险产生影响。船舶雷达的工作效率与航行安全密切相关,在能见度不良条件下的有限水域尤为明显。雨云是影响雷达工作效率的主要因素之一。因此,当船舶航行区域内出现积雨云时,驾驶员要谨慎驾驶,合理调节雷达的增益,必要时开启待机雷达,保持正规瞭望,确保安全航行。
2) 能见度不良是影响船舶通航风险的主要因素之一。雾和雨与雾共存天气相较于正常天气,对通航风险的影响显著提升。据研究,在海雾多发的中国东海海域,能见度不良天气下的船舶交通事故约占总事故的1/2,因此能见度不良对船舶通航安全有显著影响。
3) 雨与雾共生天气对船舶通航风险的影响比雾天更强烈。当雨与雾共存天气出现时,船舶通航风险水平分别比正常天气和雾天时高出11.42%和3.08%。这是由于雨与雾共生天气不仅具有能见度受限的特征,而且会在一定程度上降低雷达的工作效率,从而对船舶通航风险造成显著影响。
4) 雨与雾共生天气对人员的影响最大。雨与雾共生天气下的船舶子系统风险水平相比正常天气高出9.88%,管理子系统风险水平相比正常天气高出7.46%,人员子系统风险水平相比正常天气高出10.96%;雨与雾共生天气下的人员子系统风险水平相比雾天高出3.88%。由此可见,雨与雾共生天气对人员、船舶和管理等3个子系统都有影响,其中对人员子系统的影响最大,其次是船舶子系统,最后是管理子系统。因此,在应对雨与雾共生系统带来的风险时,要重点关注人员和船舶方面的因素,其次要完善管理体系。
5) 通过实施联合措施,能使海峡的风险管理水平达到最佳,其中雨与雾共生天气下南北禁航是最重要的关键措施。实施南北禁航措施,相比实施一般性措施和增加雨和雾天预警的措施,干预效果分别高出24.74%和21.2%;实施一般性措施、南北禁航及雨和雾天预警联合措施,相比实施一般性措施,干预效果高出36.4%。因此,当雨与雾共生天气出现时,实施联合措施,特别是实施关键措施尤为重要。仿真结果表明,当干预措施对通航风险的影响在13%左右时,通航风险开始呈现缓慢下降的趋势。鉴于琼州海峡的地理位置特殊,承担着东西海域和南北两陆交通往来的重任(据海南省政府的公开数据,2020年琼州海峡东西向通航船舶超5万艘次,南北向通航船舶超7万艘次,南北向通航船舶以客船为主),在雨与雾共生天气下采取南北禁航和预警措施,对保障海峡船舶通航的安全性具有重要意义。
4 结 语
结合海峡船舶安全通航风险因素网络拓扑结构,构建受限水域船舶安全通航风险仿真模型,采用船舶通航风险系统动力学模型进行仿真,发挥脉冲函数对观测变量产生、作用和消亡等3个阶段的计量效果,有助于揭示风险影响因素对船舶通航风险的影响机制和效用。
琼州海峡的船舶安全通航风险是很多因素共同作用的结果,其中能见度不良对船舶通航风险的影响较为突出。研究结果表明,雨与雾共生天气造成能见度不良,从而导致雷达的工作效率不佳,船舶通航的潜在风险增大。为此,考虑在雨与雾共生天气下强化能见度不良条件下的安全值班,实施加强瞭望的防范措施。
