基于雷视融合的交通信息检测技术及其应用
2022-06-10李弋博
李弋博
(中远海运科技股份有限公司, 上海 200135)
0 引 言
近年来,随着数字化技术的快速发展,数字孪生技术从制造业逐步拓展到了城市各系统的建设中,深刻影响着城市的规划、建设和发展。在雄安新区的建设规划中就曾提出“坚持数字城市与现实城市同步规划、同步建设”,给出了“数字孪生城市”的概念,其中数字孪生交通系统是数字孪生概念在交通控制领域的实际应用。数字孪生交通系统通过对路网各影响要素和参与者进行全息感知,在获取实时动态信息的同时,基于积累的经验模型对路网后续运行情况进行模拟和预测,对路网交通管理提出建议,甚至进行自主决策,提供适应性和灵活性强的实时路网优化策略。
道路动态交通流是打造数字孪生交通系统的数据基础,对其进行准确有效的全息检测具有重要意义。所谓全息检测,就是将路网中与交通有关的关键信息全部数字化,这些信息包括但不限于交通流量、排队长度、路口通行时间、车辆特征信息(车牌、车型、颜色、驾驶员)和发生的特殊事件(事故、违法事件)等。若要进行路网全息检测,通过单一技术是很难有效实现的,因此将几种技术有机结合,实现“1+1>2”的效果,是技术发展的必然方向。
1 交通检测技术现状
从安装方式的角度看,交通检测技术手段可分为接触式和非接触式2类,其中:接触式检测以地感线圈和地磁检测为典型代表;非接触式检测以微波雷达、激光雷达和视频检测为典型代表。从检测区域的角度看,交通检测技术手段可分为断面检测和区域检测2类,其中:断面检测以地感线圈、地磁检测和常规微波车检器为代表;区域检测以广域微波雷达、多线激光雷达和视频检测为典型代表。对于交通全息检测来说,需获取整个路网中的实时动态交通流信息,因此必须采用区域交通检测技术,其中几种典型的区域交通检测技术对比见表1。
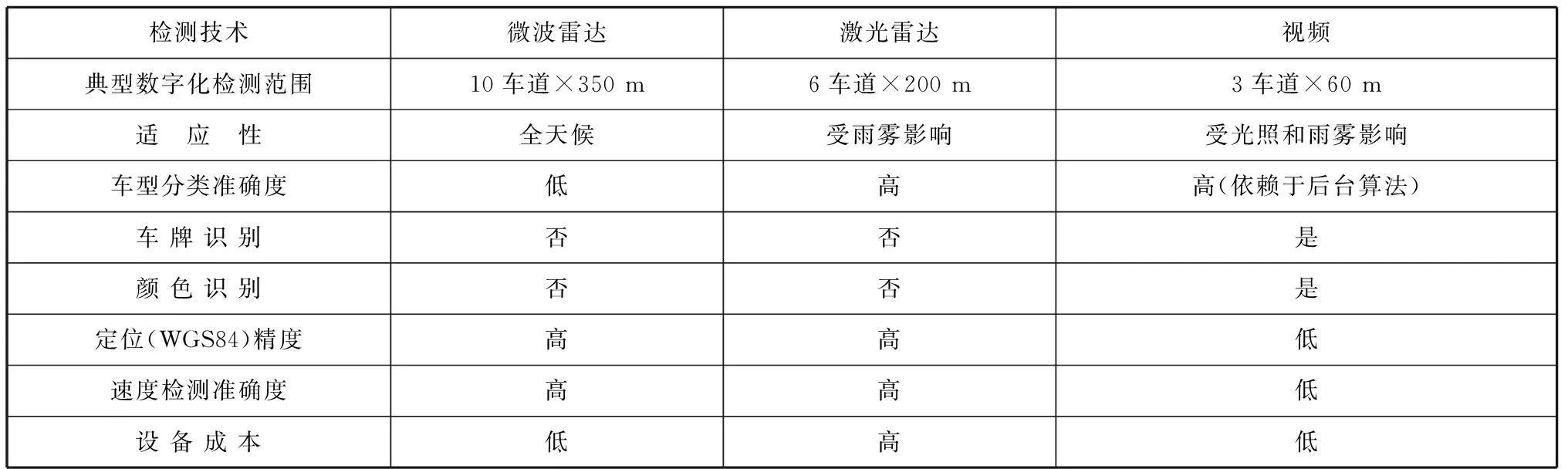
表1 几种典型的区域交通信息检测技术对比
从表1中可看出:微波雷达和激光雷达都能实现大区域交通流数字化检测,但无法检测车牌和颜色等车辆视觉信息;视频能检测车辆视觉信息,但检测范围较小,受光照和雨雾的影响比较严重。因此,现有的单一检测技术都难以满足交通全息检测的需求,必须从技术复用互补和数据融合方面寻求解决方案。
2 雷视融合交通检测
在技术复用方面,雷达检测与视频检测具有明显的互补特点。在雷达技术路线选择上,激光雷达与微波雷达相比,具有检测分辨率高、车型识别能力强和定位精准等优点,但其设备体积大、成本高,且在检测区域和全天候检测能力等方面表现较差,难以满足大规模的交通数字孪生系统建设需求。
微波雷达检测与视频检测具有很好的互补性,将二者的数据相融合,能提高系统整体的鲁棒性和数据的准确性。微波雷达能全天候准确检测目标的速度和位置信息;视频检测设备能对目标可视化信息特征进行捕捉,对特定目标进行跟踪和捕捉,并进行事件分析和上报。在检测区域内同时部署这2种技术的有关硬件,通过软硬件一体化的数据融合技术,可充分发挥技术融合优势,在检测区域覆盖、检测适应性和成本控制等方面达成平衡,全天候、全方位精确检测道路交通流量、占有率、路口排队长度、车辆通行速度和车辆行驶轨迹等各类信息。同时,雷达检测数据与视频数据相融合,能使雷达检测到的精准定位信息和速度信息与视频检测的目标相匹配,在实现大区域、全天候检测的同时,做到检测场景直观可视,相对于采用单一检测技术,在应用效果方面具有明显优势。
2.1 雷视融合技术
雷视融合技术是集微波雷达交通检测技术和视频交通检测技术于一体,用于实现交通全息检测的技术,雷达交通检测结果与视频交通检测结果各有优点和缺点,检测结果对比见图1和图2。

图1 视频检测设备场景图
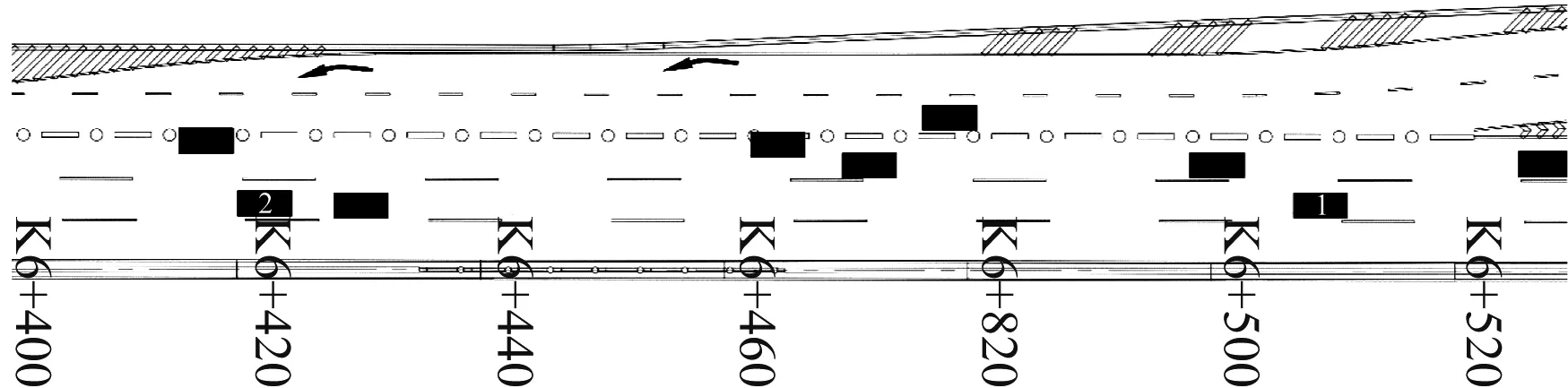
图2 雷达检测效果图
从图1和图2中可看出,视频检测的优点是能获得牌照、颜色等车辆物理特征信息,以及近距离车辆的位置信息,缺点是具有视觉透视效应,即对于相同尺寸的车辆而言,其距离越远看起来越小,如图1中的车辆1(距离检测点约20 m)和车辆2(距离检测点约100 m)都是小型车,车辆2看起来比车辆1小很多,难以准确检测远距离车辆的位置和速度信息。另外,视频检测受光照和气候等自然条件的影响比较严重,不能全天候准确检测。雷达检测的优点是没有视觉透视效应,在雷达检测中,车辆1与车辆2呈现的尺寸基本一致,因而能准确检测远距离车辆的位置和速度信息,且不受光照和气候等自然条件的影响,能全天候检测,但无法识别车辆牌照和颜色等车辆视觉信息。因此,将雷达检测技术与视频检测技术融为一体的雷视融合交通检测技术能集二者的优势于一体,取长补短。
雷视融合技术发展至今,经历了3个阶段,这3个阶段分别代表了雷视融合技术的3个层次。
1) 第一阶段(雷视融合第一层次)属于初级阶段,只是将雷达与视频设备安装在同一个外壳内,实际上二者的硬件和软件及数据输出都是分开的,视频起到的作用仅限于协助雷达远程调试,该阶段的产品以雷视一体微波车检器为典型代表。
2) 第二阶段(雷视融合第二层次)视频所起的作用相对第一阶段明显增大,除了协助雷达调试以外,还协助雷达进行车辆分类和行人非机动车识别,该阶段的产品相比第一阶段的产品,其车型分类能力和抗行人及非机动车干扰能力明显增强,但与交通全息检测的目标还有很大距离。该阶段的视频不具备车牌识别能力,也不具备目标全息融合和全程融合跟踪能力,无法实现交通全息检测。
3) 第三阶段(雷视融合第三层次)属于最新阶段,实现了微波雷达与视频检测散射点层面的数据融合,从而实现了交通全息检测。雷达交通检测技术与视频交通检测技术有一个共同点,即通过这2种技术检测到的原始信息都是目标的散射点信息,即目标各部位在检测器传感器上的成像信息是强度不同的散射点,这样每个目标在检测器上的图像就是一片形状不规则、强度不一的散射点,基于该特点可实现雷达与视频交通检测散射点层面的融合。在实际数据融合应用中,由于两者的参考坐标系不同(雷达数据参考系建立在三维世界坐标系下;视频数据参考坐标系建立在图像二维坐标系下),为实现两者数据的有效融合,需对雷达与视频设备进行空间标定和时间同步。在第三代雷视融合设备中,雷达与摄像机实时采集数据,保证两者采集的数据在时间上同步。同时,通过信息处理单元为世界坐标系与图像像素坐标系建立对应关系,通过转换算法将检测目标在世界坐标系下的三维坐标转换为图像像素坐标系下的二维坐标,并根据不同设备安装情况调整系统内的辅助参数,对设备进行标定(见图3),从而实现对各类信息的实时检测。
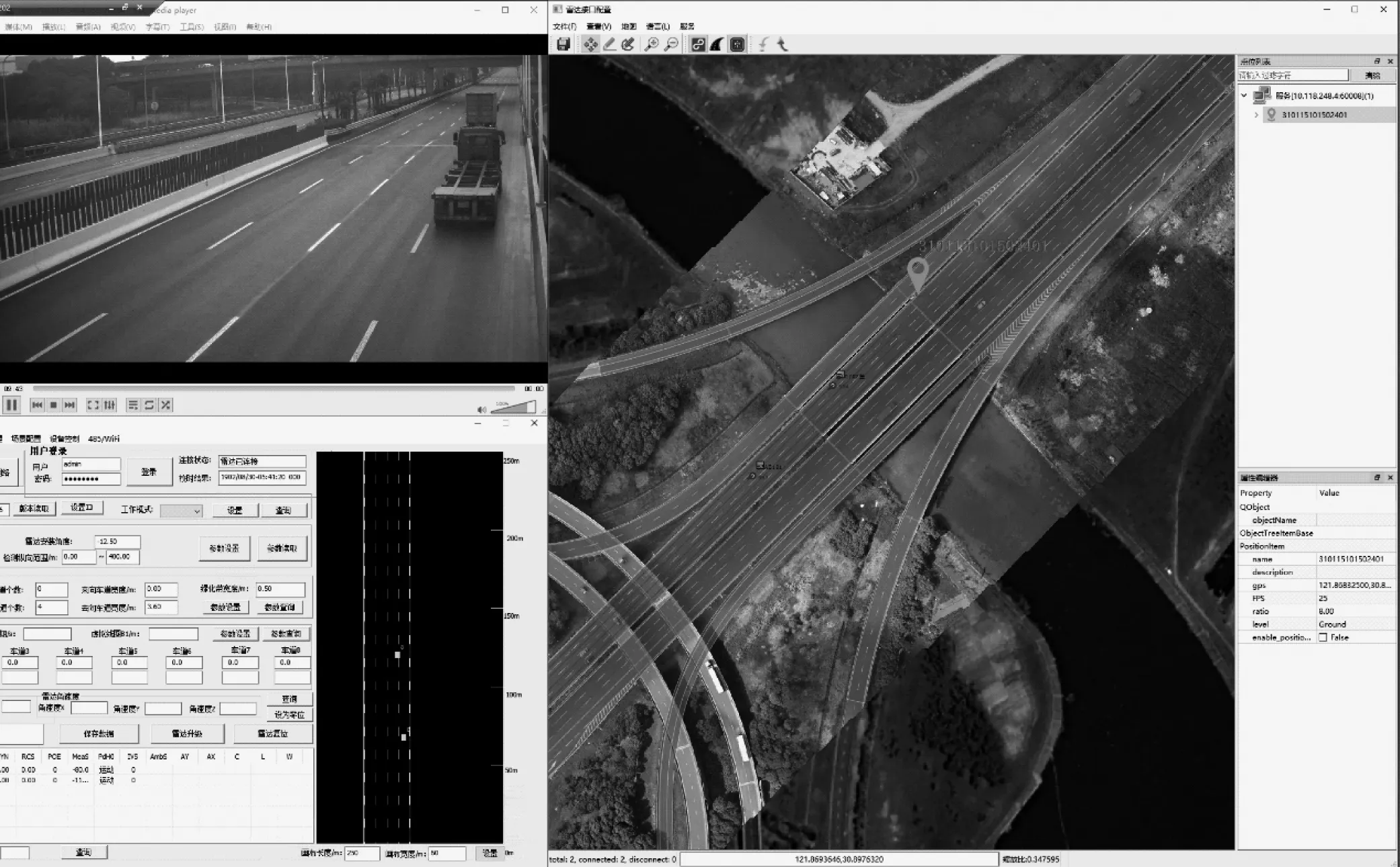
图3 雷视融合设备参数标定设置界面
2.2 雷视融交通全息检测设备构成
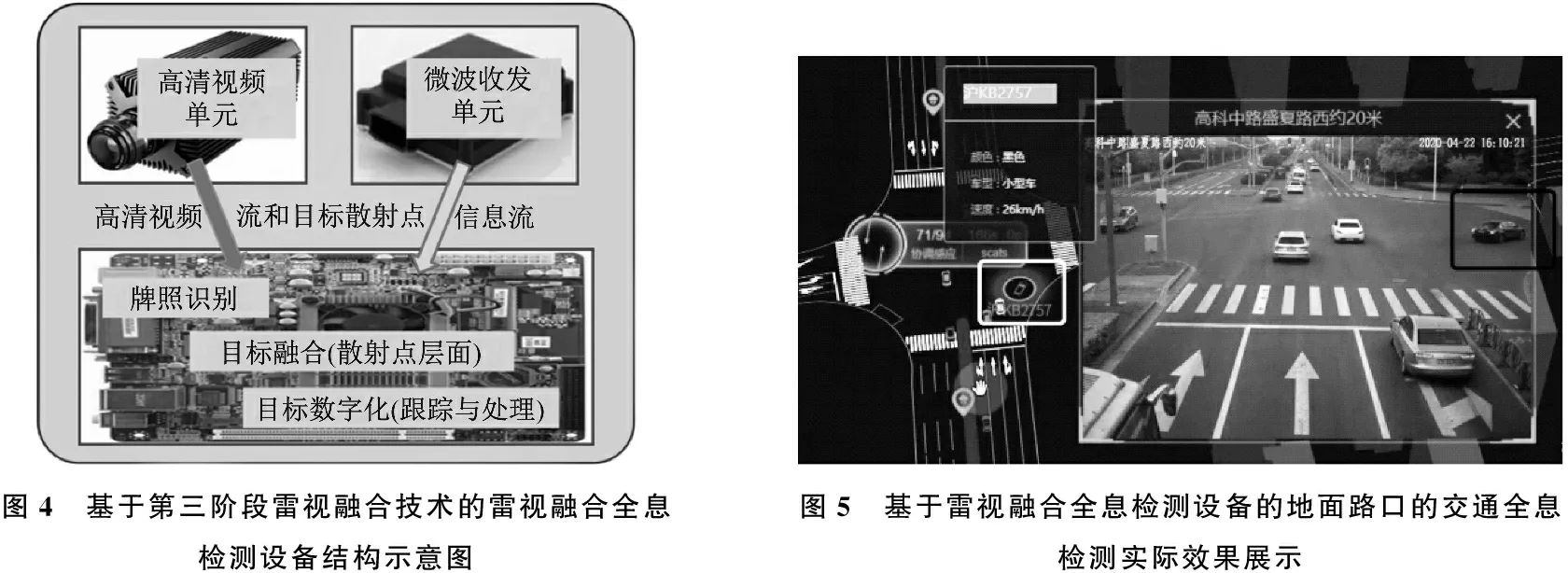
基于第三阶段雷视融合技术的雷视融合全息检测设备结构示意图见图4。将高清视频单元和微波收发单元产生的视频流和目标散射点信息流馈入信号处理单元,通过分析视频流获得车辆牌照信息;雷达与视频目标检测散射点层面信息融合,一方面确定目标的几何位置信息(包括坐标和速度),另一方面获得车辆的特征相关信息(包括车辆牌照号码、车型、主体颜色和相关照片等),这样就能获得道路交通流车辆的所有主要信息(即交通全息,包括车辆坐标、运动速度、车辆牌照号码、车型、主体颜色和相关照片等)。基于雷视融合全息检测设备的地面路口的交通全息检测实际效果展示见图5。
3 雷视融合交通全息检测设备的应用
在东海大桥智慧交通管理系统建设中,外场设备采用雷视融合检测方案。该系统由外场设备、内场设备和系统管理平台组成,其拓扑图见图6。
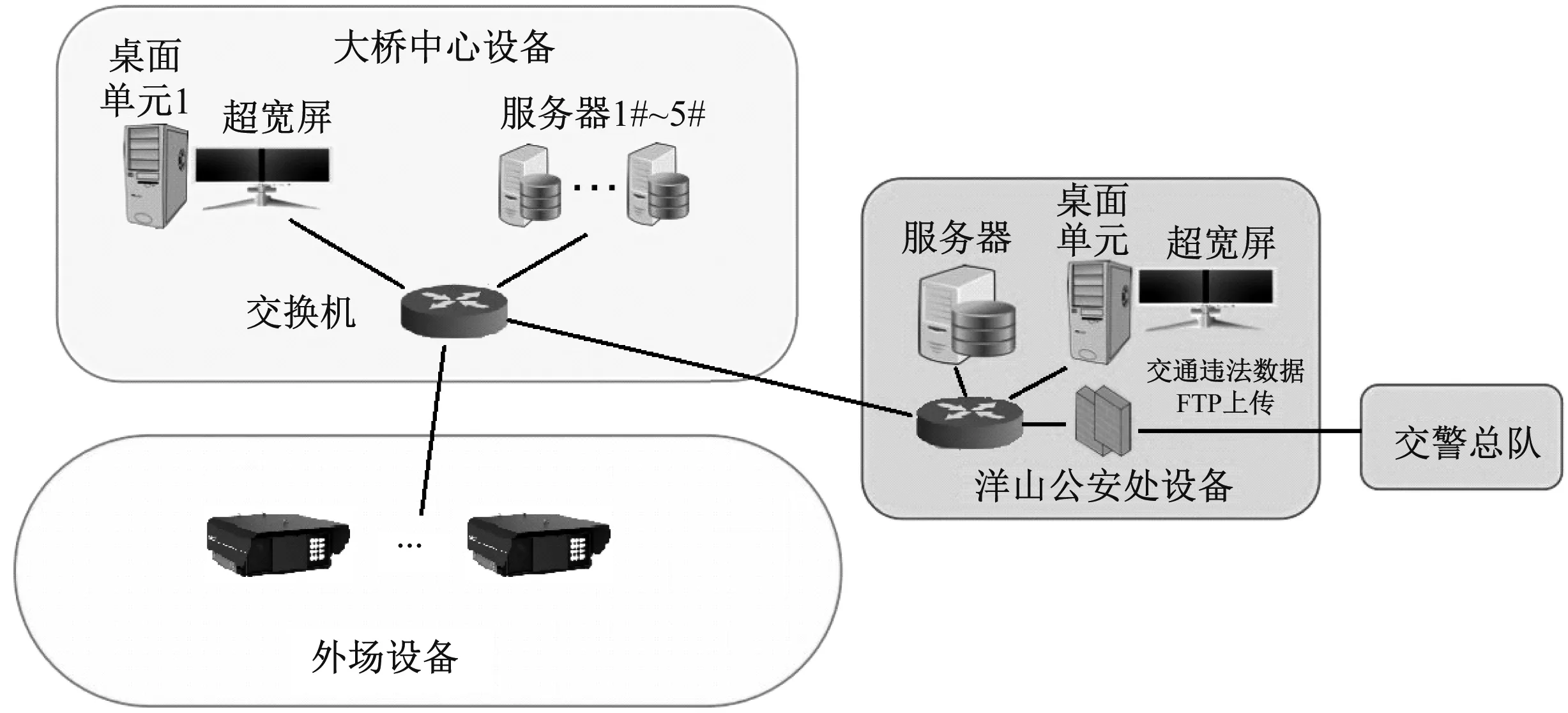
图6 东海大桥智慧交通管理系统拓扑图
相比传统检测设备,雷视融合检测设备具有全天候检测不受气候影响、检测区域广、数据精度高和数据多元化等优点。通过雷视融合技术,系统能实现对东海大桥交通流的全数字化管理,将所有车辆目标的坐标、速度、车牌号码、车身主体颜色、车型和驾驶人照片等信息数字化,对交通流实施精细化管理。系统可采集的交通流数据主要包括:
1) 与车辆相关的数据,即断面信息(流量、速度、占有率、车型和车头时距等)、区域信息(车辆密度、排队长度、区域平均速度和拥堵指数等)和单车信息(车牌号码、颜色、车型和驾驶人照片等);
2) 交通违法数据(占用应急车道、超速、违停、逆行、倒车和实线变道等);
3) 交通事件数据(拥堵、交通事故、施工和行人等);
4) 车路协同数据(道路车辆实时运动轨迹)。
东海大桥智慧交通管理系统具有交通大数据采集、数字化交通流实时动态展示、拥堵预警与视频场景推送、综合执法卡口、特定目标车辆追踪、交通事件检测与视频场景推送、交通违法检测与取证和信息分发管理等功能,具有以下特点:
1) 在国内率先实现对特大桥交通流的全数字化、可视化展示,整个东海大桥的交通流全部掌握,并提供车辆对象的全结构化数据;
2) 特定车辆全范围视频追踪,车辆行驶到哪里,监控视频追踪到哪里,监控车辆始终在视野内,对于勤务和智能重卡无人车测试监控而言具有重要意义;
3) 停车事件检测与事件局部视频场景联动推送,一旦大桥上有违法停车的情况,停车点位前后2个遥控摄像机将自动聚焦于该车辆并预警,便于监控人员采取应对措施;
4) 针对交通拥堵和交通事件及时发布预警引导,以尽可能地避免发生二次事故,降低对交通的影响,提高交通安全管理水平;
5) 为车路协同提供全面的交通大数据,助力智能重卡测试与自动驾驶的实现。
图7为系统内各点位交通流量统计信息;图8为智能重卡无人驾驶测试车跟踪场景。
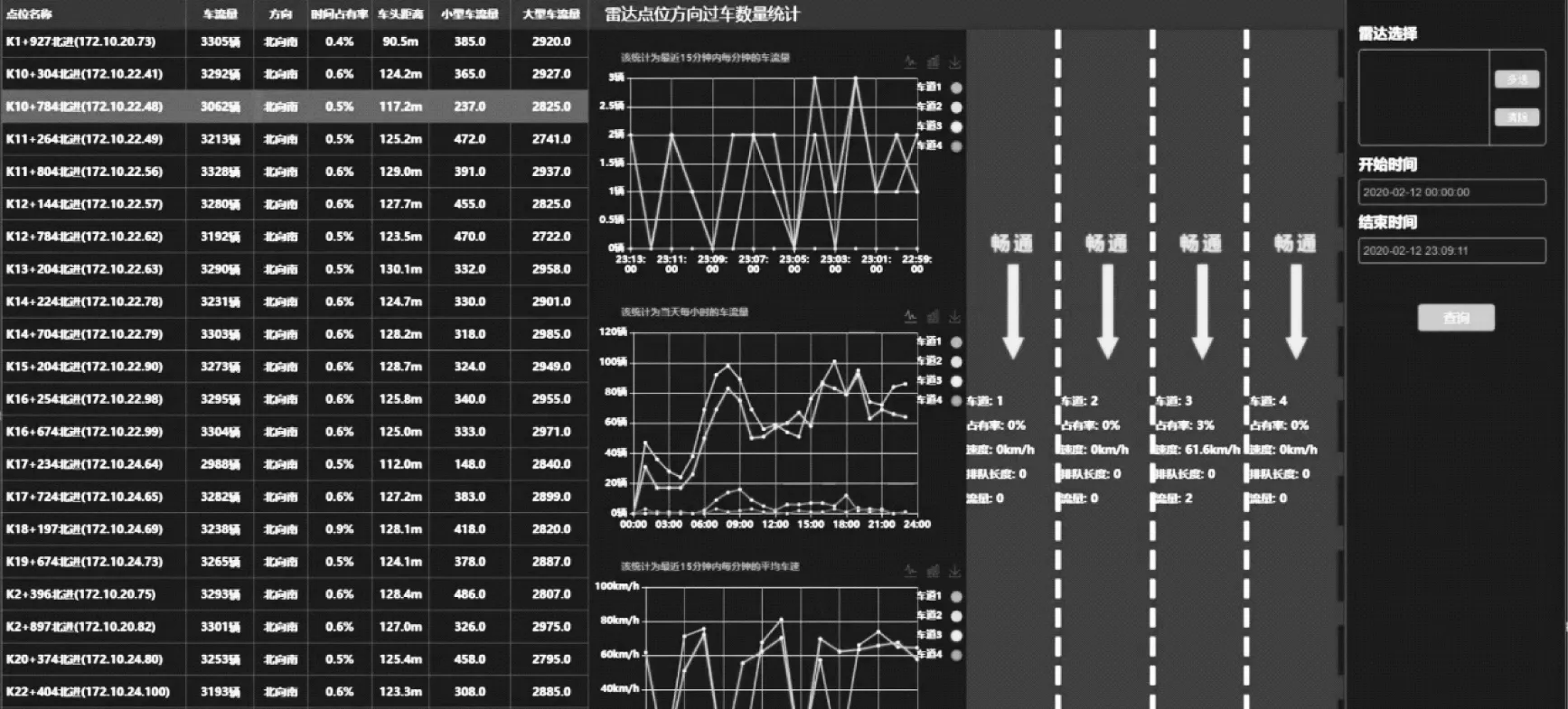
图7 各点位交通流量统计信息
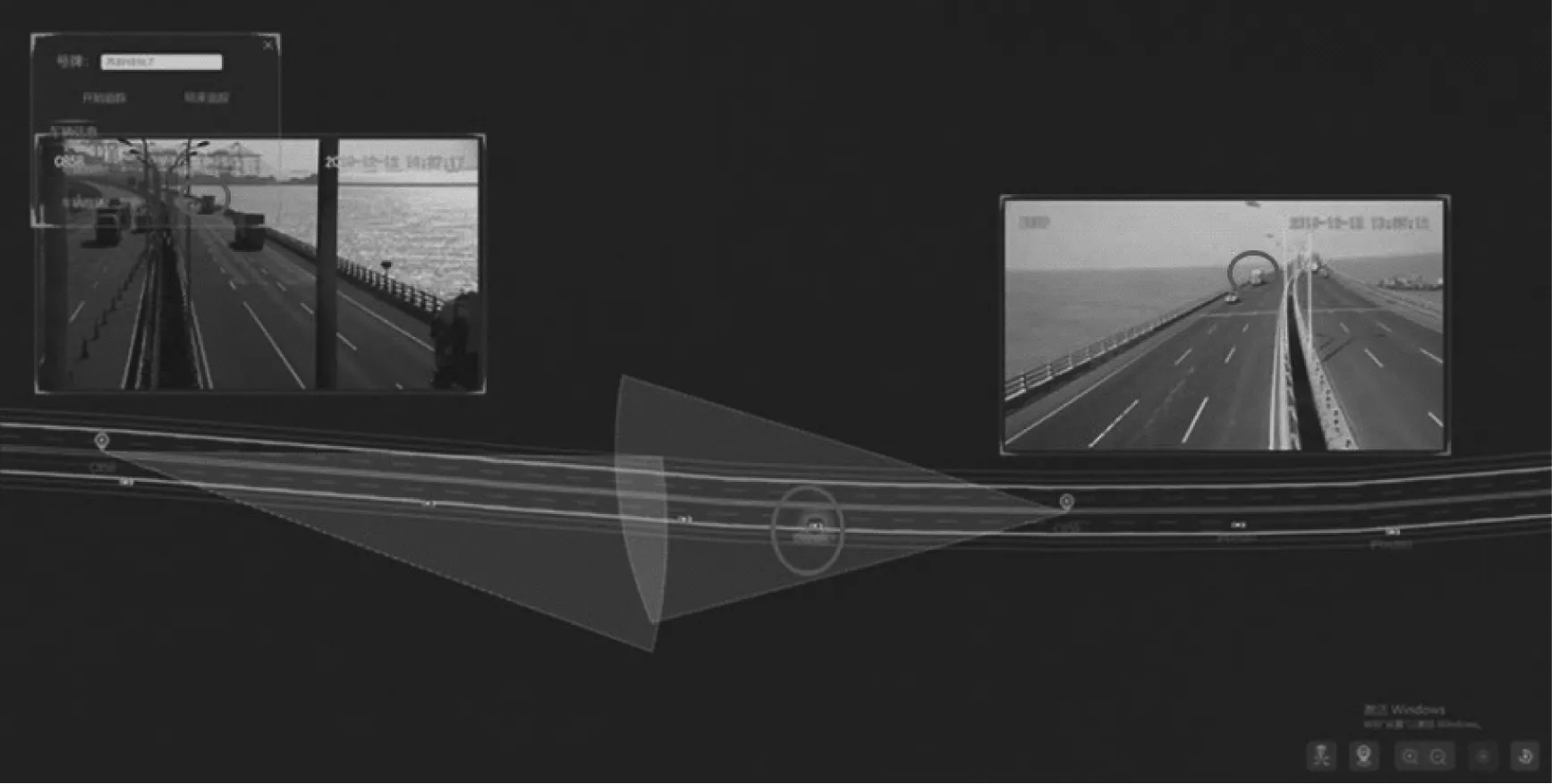
图8 智能重卡无人驾驶测试车跟踪场景
4 结 语
雷视融合交通全息检测技术采用微波雷达与视频一体化设计,集微波雷达交通检测技术和视频交通检测技术于一体,充分发挥二者的优势,取长补短,克服了单一技术的缺点。实践结果表明,雷视融合检测设备能检测车辆轨迹数据、行人及非机动车轨迹数据和车道车辆特征信息等重要交通信息,与传统单一检测技术相比具有全天候、长距离、高精度和多元化的优势,能更好地满足交通全息检测的需求。当然,作为一种新兴技术,该技术仍有很大的提升空间,比如:系统调试难度较高,需由专业人员调试,后期维护相对复杂;与互联网交通数据有效融合的实施方案有待探索等。
