一种优化的AIS与VTS融合算法
2022-06-10杨晓环
杨晓环
(中远海运科技股份有限公司, 上海 200135)
0 引 言
船舶交通管理系统(Vessel Traffic Service,VTS)的主要功能是为其覆盖水域内的船舶提供信息服务、助航服务和交通组织服务,以及协助完成联合服务和应急服务等,对船舶的实时动态进行监控,使重点船舶、重点区域的海事动态监督管理得到加强。船舶在VTS覆盖区域内航行时,VTS操作员可通过VTS设施监视船舶的运动情况,改善违章、偏航状况,预防船舶交通事故发生。
长期以来,VTS主要通过交管雷达实现对船舶动态和水域内的交通状况等数据的收集,而交管雷达只能反馈雷达回拨图,存在着不能自动识别目标、对目标的跟踪精度低和有视觉盲区等局限性,这是VTS发展的瓶颈。
船舶自动识别系统(Automatic Identification System,AIS)主要由基站、船台和AIS网络组成,集网络技术、无线通信技术、计算机技术、电子信息技术和微电子集成技术等技术于一体,可用于进行岸与船、船与岸和船与船之间的识别通信。AIS利用甚高频(Very High Frequency,VHF)通信链路,既可将船舶的位置、航速和航向等信息传递至同区域内的其他船舶,又可接收其他船舶的航行信息,已在海上船舶导航、识别和监控等领域得到广泛应用,利用AIS进行船舶识别、协助船舶跟踪、简化交换信息(如减少口头强制船舶报告)和提供额外信息”。
VTS通过引入AIS并进行信号融合,使自身得到了突破性发展,不仅能获取实时回拨图,而且能获取船舶的静态信息和动态信息。目前市场上的VTS设备主要产自国外,国内还处于优化完善阶段。
本文以东海某海事局辖区为例进行数据采样,通过对国外厂商SAAB生产的VTS的使用效果进行分析,找出VTS与AIS融合存在的问题。在此基础上,通过去重、校准、推演和建立关联机制等数据治理算法,实现VTS、AIS和海事业务数据的融合,建立一个新的海事监管平台,将以往需要交管中心人工多系统核对关联的工作环节简化,实现系统直接关联输出。
1 VTS与AIS融合存在的问题
目前我国沿海大部分港口的重要水域和长江下游的重要航段都已被VTS覆盖,VTS在减少水上交通事故、提高航运效率和保护环境等方面发挥了重要作用。目前VTS在实际生产中还存在着需要不断完善的地方。以东海某海事局辖区为例,其日均航行船舶约7 000艘次(含渔船),日均VTS信号约1 800万个,日均AIS信号约2 000万个,数据量巨大,无法通过人工对数据进行分析和使用。通过对该海域VTS的使用效果进行分析,发现存在以下问题:
1) 特定场景下的数据精度较差。
当以雷达为主要监控手段时,若两船发生会遇或追越,易出现信号跟踪错位的情况,尤其是当两船大小相差较大,大船将小船挡在远离VTS探头的方向时,会出现雷达信号被遮挡的情况,形成动态雷达盲区,由于VTS采集的AIS静态信息会持续10 min,因此被遮挡的小船的VTS信息会变成小船正确的AIS信息和大船对应的动态信息。
2) 信息推断的能力不足。
海事部门的主要职责除了应急抢险以外,还有及时发现辖区内的一些危险行为或违法行为,一般存在这些行为的船舶会在某些时段关闭AIS信号广播,避免被检测到。现有VTS对于正常开启AIS的船舶,已经能做到AIS与VTS信号融合,对于AIS异常关闭的船舶和突然出现的AIS信号,没有提供推断服务,易造成需应对的危险行为被忽略掉。
3) 与海事业务系统脱节。
目前市场上的VTS几乎都是国外厂商SAAB和ATLAS生产的,由于存在相对垄断的情况,几乎没有为使用者设置个性化功能,这就导致VTS无法与我国海事自有业务系统相关联,使海事业务人员不能很快地获得想要的信息。在此情况下,需将VTS与AIS融合之后得到的信息与海事业务系统信息相关联,使平台使用者能第一时间识别船舶,同时得到船舶的静态数据、动态数据,以及海事系统中的行政处罚、检查和安全相关数据。
由此可知,要解决以上实际业务问题,必须实现AIS、VTS和海事业务信息的融合。
2 信息融合算法的设计与实现
目前市场上提供的VTS已初步实现与AIS的融合,但其采用的融合算法是不可见的黑盒子,无论是进行VTS校验还是进行推算,目的都是为雷达扫到的目标标注明确的船舶静态数据和动态数据,在此基础上,将融合后的静态数据与海事业务数据相融合,实现“一船全景”。
在VTS中,雷达的目标数据的更新周期一般为3 s,AIS的目标数据的更新周期为2~10 s(见表1),也就是说在充分考虑航速因素的基础上,对于运动的目标,VTS与 AIS同时发出一个信号之后,VTS会在第6 s发出第2个信号,在第9 s发出第3个信号,而AIS第2个信号要在第10 s才能发出,因此 VTS数据与AIS数据接收时间最大差值为9 s。常规货船的航速在15~20 kn,一般渔船的航速为9~12 kn。对于在航船舶而言,其在9 s时间内的航速和艏向不会发生很大变化,可近似视为匀速直线运动,为尽可能地兼顾第1个信号和第3个信号,在计算推算半径时用到的时间阈值取1~9 s的中位数5 s,因此推算中的距离阈值半径为对地航速(Speed Over Ground,SOG)乘以5 s。
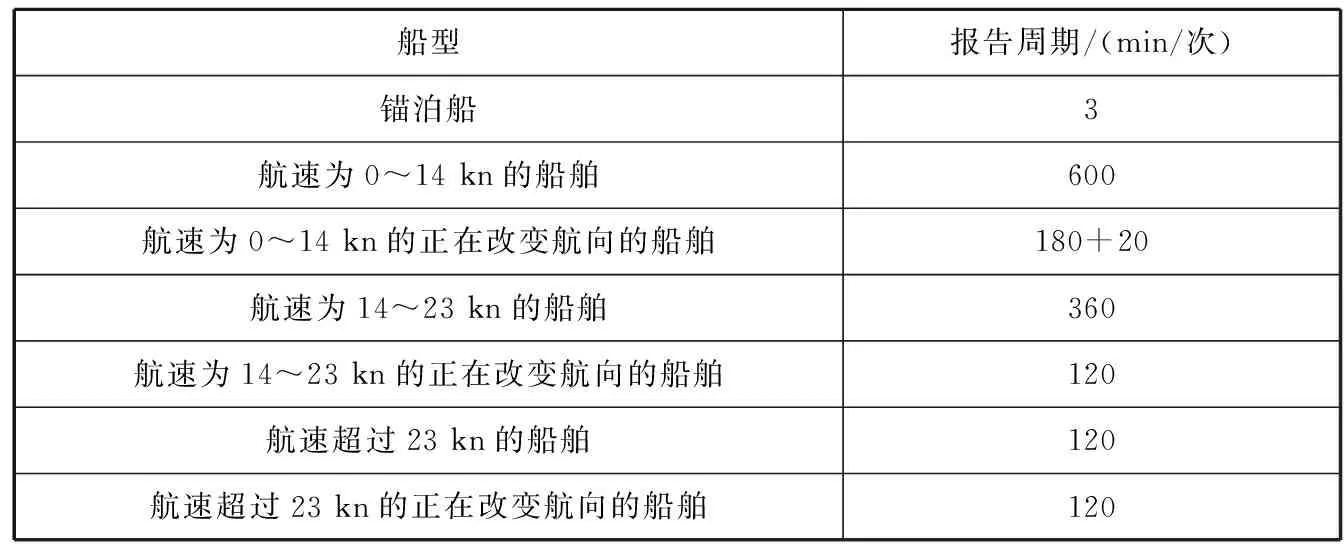
表1 AIS信息推送周期
2.1 强化特定场景数据精度
2.1.1 排除飞点
VTS传过来的数据是未经处理的原始融合数据,包含大量飞点数据(见图1),船是在水中的,突然出现一个陆地上的经纬度,导致整个轨迹出现异常,因此平台在收到数据时,首先识别并排除飞点。现代化的超大型集装箱船最高航速能达到30 kn,因此飞点的速度阈值定义为最高速度的2倍,即60 kn,当船舶从前置信号点的位置以60 kn的速度也无法抵达最新经纬度坐标点时,认为新收到的信号点为飞点,标记之后不显示在常规的轨迹跟踪中,平台轨迹查询中提供“显示飞点”选项。

图1 飞点轨迹图
增加飞点处理逻辑之后,图1的轨迹更新为图2,能以合适的级数正常显示船舶轨迹。
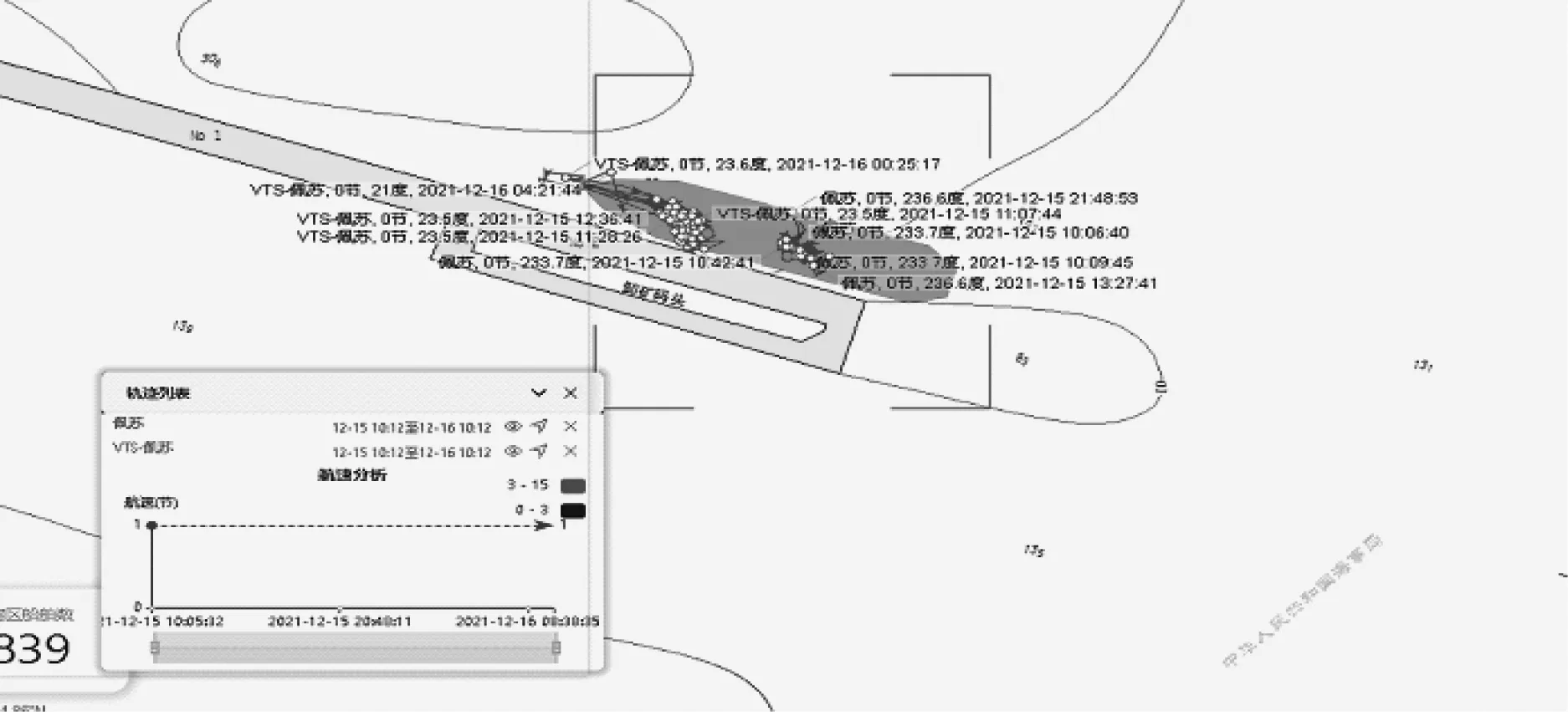
图2 不含飞点轨迹图
2.1.2 位置信息去重
对于正常开启AIS设备的船舶而言,其通过VTS获取的数据中已融合相应的AIS信息。
通过对接口数据进行分析发现,VTS已采纳AIS的部分信息,只有当VTS被遮挡时才会用AIS的信息补充经纬度等信息。由此,平台在收到VTS信号时,会直接将其与收到的AIS信号合并。由于VTS和AIS的数据量巨大(采样区为宁波海事辖区,其VTS日均信号1 800万个,AIS日均信号约2 000万个),存储压力巨大,但数据重复度较高,因此需对融合之后的信号进行抽稀处理。平台80%的预警逻辑中的信号点数量阈值、时间阈值和距离阈值都是参照AIS信号频率设定的,且在稳定运行,因此在融合过程中,侧重AIS,兼顾锚泊船的信号,当在3 min时间内同时有AIS信号点和VTS信号点时,保留AIS信号点。结合船舶航速,定时按以下规则对同一个船舶目标进行合并,并作抽稀处理:
1) 航速小于1 kn,每隔3 min保留1个点;
2) 航速为1~14 kn,每隔10 s保留1个点;
3) 航速大于14 kn,每隔3 s保留1个点。
合并之后的轨迹密度基本保持AIS的层级,VTS的经纬度是依照船舶尺寸获取的船舶中心点的经纬度,AIS的经纬度是按设备安装位置选取的,二者存在一定的误差,该处理算法忽略了AIS设备安装位置对经纬度的影响。
2.1.3 VTS数据校准
在港区内,船舶来往比较密集,很容易出现大船遮蔽小船的情形,被遮蔽的小船会从雷达监控中消失,此时VTS接口发送的小船数据中是存在静态数据的,但经纬度数据变成了大船的数据。
在VTS重叠区,200 m以上的同一艘船偶尔会出现多条postreport ID不一样的记录,实地考察VTS硬件分布之后发现,引发该现象的主要原因是VTS内部对多源信号的合并存在缺陷。
因此,需对接收的VTS数据进行校验:假定接收的第一个完成AIS与 VTS融合的信号是正确的,每接收到1个新的信号,就进行前后2个信号的艏向对比,判断是否发生大角度偏移,根据经验设立阈值为90°,当前后2个信号的艏向差值大于90°时,认为信号发生了错乱。
同时,还需判断前后2个信号匹配的静态信息中的船长差值,若发生变化,则认为船舶间发生了遮蔽错乱。对于发生错乱的,自动继承前一个信号对应的AIS信号,包括相关的船舶静态数据和轨迹信息。
此外,定时对redis中的数据进行扫描,不考虑postreport ID,当同一个水上移动通信业务标识码(Maritime Mobile Service Identify,MMSI)存在多条数据时,只保存最新的一条,将其他数据删除。
2.2 VTS推算
2.2.1 静态信息丢失VTS
对于自进入VTS覆盖区开始就没开启过AIS设备的船舶来说,从技术上看无法获得相应的船舶静态数据,这种场景不在本文讨论的范围内,本文仅讨论VTS覆盖范围内,航行途中关闭AIS的情况。
若收到的VTS信号无静态信息,说明该目标船关闭了AIS设备,此时需向前推算关联AIS静态信息,进行持续关联,并生成相关预警。
1) 识别无静态信息。
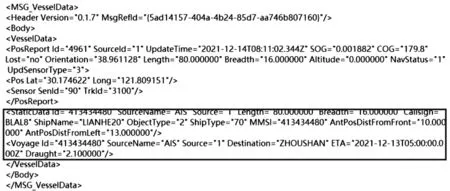
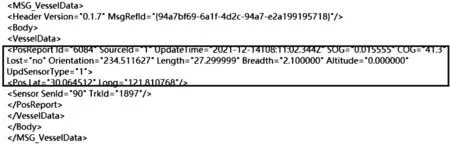
若报文中只包含PosReport信息,没有StaticData和Voyage信息,则此类信息缺少静态信息:
2) 推算前置信号点。
由于PosReport的ID只有4位,因此暂时不考虑根据ID进行唯一性信息跟踪。对于已建立平台AIS信息与 VTS信息关联关系的船舶,当VTS中的AIS信号丢失时,直接进行标识,不影响平台对VTS中船舶静态数据的匹配。无论是哪台设备接收到的AIS信息,都来源于船端通过VHF广播的差分全球定位系统(Differential Global Positioning System,DGPS)数据。因此,当VTS中的AIS信息时,平台的AIS信号会同步消失,此时需通过算法匹配到邻近的前置信号点,获取船舶静态信息。
VTS的信号频率为3 s,因此以SOG计算5 s的距离,以COG反向一个角度为90°的扇形,落在这个扇形中的VTS点认为是原信号点的前置信号,若在扇形范围内存在多个信号点,则计算每个信号点到扇形中心线的垂直距离,取垂直距离最短的信号点作为前置信号点。
若持续10 min没有AIS信号进来,无论是否有VTS信号,平台都将生成AIS异常关闭报警。
2.2.2 VTS信号消失
VTS本身是通过雷达不间断扫描监控的,当船舶进入狭水道或被更大的船舶遮蔽时,会形成VTS盲区,对于有持续AIS信号的船舶而言,VTS已进行信息融合,会持续提供融合后的数据,若 AIS信号也消失,则平台会丢失对该船的持续跟踪,直到AIS信号或VTS信号再次出现。
2.3 与海事业务数据融合
在完成VTS与AIS的融合之后,即得到每个VTS信号对应的MMSI、IMO(International Maritime Organization)编号和船舶英文名称。在海事业务系统中,国内船舶以初次登记号作为唯一性标识,国外船舶必须先对船名、IMO和MMSI进行综合比对,再进行定位,有时甚至要参考船长参数。为此,必须建立平台自有船舶库,并对进入其中的数据和案例进行规则清洗,最终形成可提供快速定位功能的适用于国内外船舶的船舶库。船舶库的信息包括MMSI、中文船名、英文船名、IMO编号、初次登记号、船长、船舶类型(AIS)、船旗国、AIS更新日期和是否最新,以英文船名为主关键字。
先根据海事业务系统进行初始化积累,再根据AIS静态信息进行更新。平台整体运行以MMSI为唯一关键字,通过平台船舶基础库,可同时关联海事业务中的历史行为数据和最新动态数据。
3 实际应用效果
通过应用上述算法,平台存储压力得到了缓解,船舶运行轨迹更加平缓,最主要的成效体现在VTS校验和VTS推算上。下面通过具体实例检验该算法的应用效果。
船舶A在2021年12月17日22:57关闭了AIS设备,在辖区内进行高风险操作,通过VTS推演,成功将扫描到的船舶信号关联到了确定的船上,并生成了预警信息,帮助海事执法人员在赶往事发地制止高风险作业的同时,掌握该船过往经历,并及时联系船舶所属公司,该船的轨迹示意图见图3。
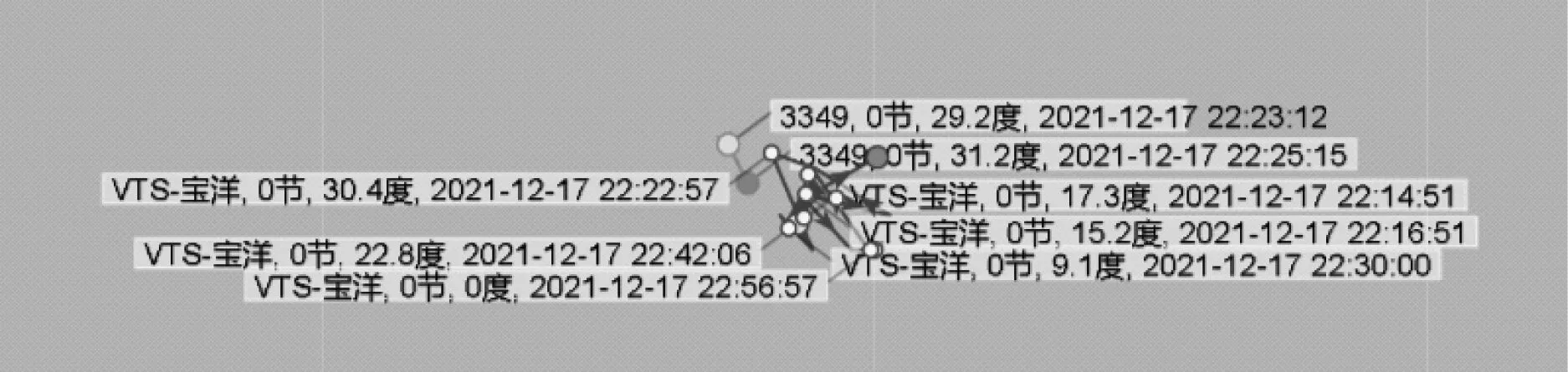
图3 高风险行为船舶轨迹示意图
船舶B在2022年1月10日10:39关闭了AIS,关闭状态持续10 min之后,平台进行了预警,通过根据VTS推演出来该船后续航行轨迹之后,及时通知相关海事处进行就近拦截,询问原因并排除问题后予以放行。图4为异常关闭AIS船舶轨迹示意图。
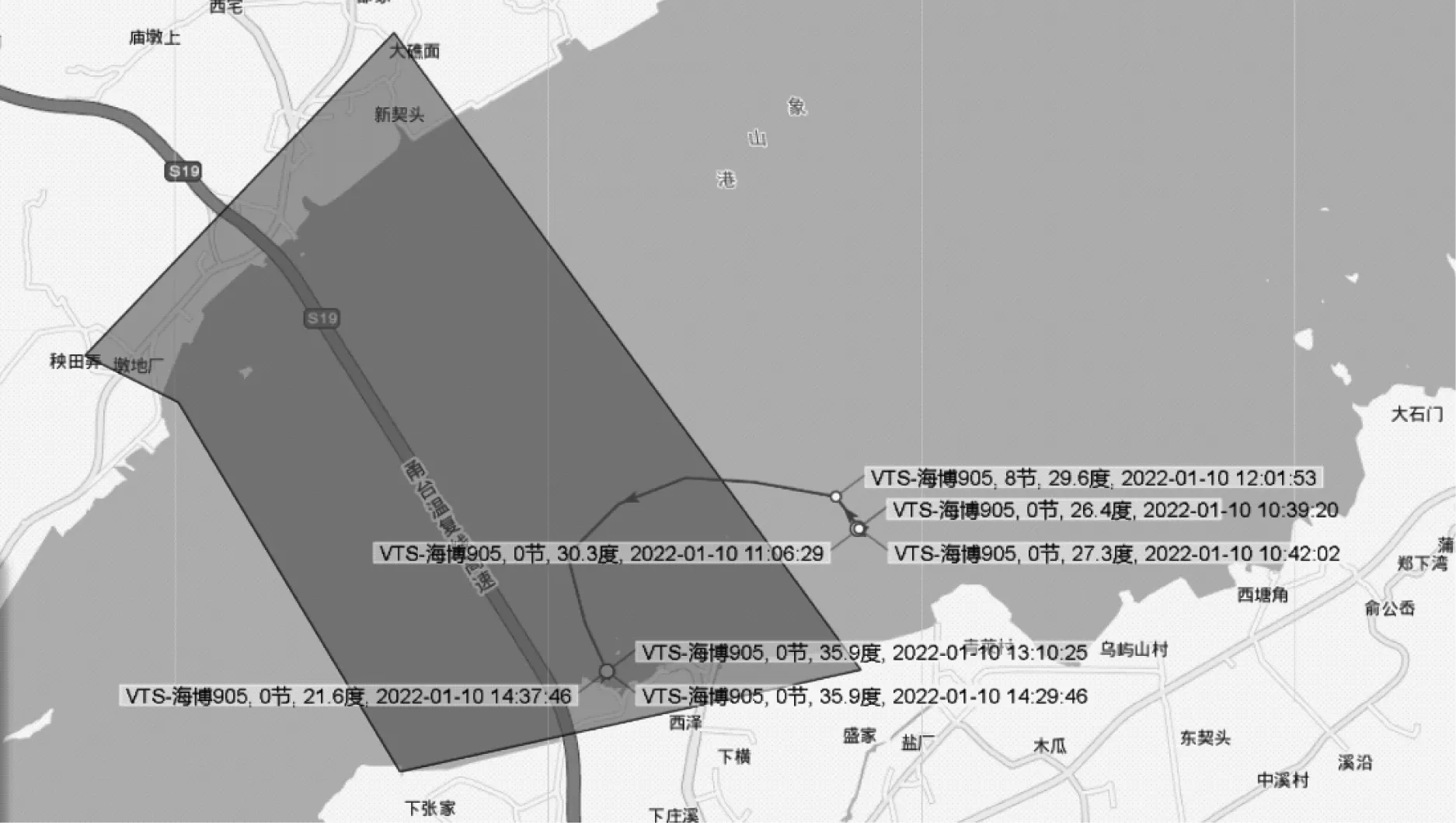
图4 异常关闭AIS船舶轨迹示意图
4 结 语
当前的VTS已实现与AIS的数据融合,通过采用本文所述数据融合算法进行处理,进一步实现了VTS信号与海事业务数据的融合,在完成平台建设之后,能为海事执法提供精准快速的数据支撑。本文在研究过程中充分考虑了实际业务中的场景,并最终应用到了实际业务中。虽然该算法的有效性在实际应用中得到了验证,但还没有对无人机等设备的视频信号进行结构化处理,并进行更全面的融合。
另外,监控技术也在不断进步,在IMO海上安全委员会(Maritime Safety Committee,MSC)第103次会议上,甚高频数据交换系统(VHF Data Exchange System,VDES)技术已获得共识,将被列入《国际海上人命安全公约》(International Convention for Safety of Life at Sea,SOLAS)中,分别在2022年1月和2023年1月讨论确定将VDES纳入SOLAS实施决议,并在2023年的MSC大会上通过强制安装决议。以此为基础,未来全球履约船舶将安装VDES设备。届时,海上船舶安全监控将进入一个全新的时代。
