甜菜捡拾机研究现状及展望
2022-05-27李建东谭北雁刘赟东
王 佐,王 飞,王 楠,李建东,谭北雁,刘赟东
(1.内蒙古自治区畜牧工作站,内蒙古 呼和浩特 010010; 2.中机美诺科技股份有限公司,北京 100083;3.现代农装科技股份有限公司,北京 100083)
0 引言
甜菜是我国仅次于甘蔗的糖料作物,广泛种植在北方各地[1]。现阶段,甜菜收获机利用率低、人工作业多、劳动力需求巨大、生产效率低下且经济效益低。甜菜收获机型的落后,影响了甜菜种植行业的健康快速发展,亟待研制出一种高效、低损、智能的甜菜捡拾机[2]。为更好地服务甜菜种植行业,本文介绍了甜菜捡拾机械收获现状,有助于研究和发展国内甜菜收获机械。
1 国内外发展现状
联合收获方式和分段收获方式是甜菜收获两种主要形式,其中甜菜捡拾机用于分段作业,联合收获机用于联合作业。
1.1 国外发展现状
国外较早就对甜菜联合收获机械进行了研究,目前机械化水平高,普遍以联合收获为主,分段收获较少。联合收获机械可以完成从挖掘到清理装载等一系列工序,代表产品有德国格立莫(GRIMME)公司的REXOR 620型甜菜收获机(图1)、德国荷马(HOLMER)公司的Terra Dos T4-40型甜菜收获机和法国奠罗(MOREAu)公司AC3S型甜菜收获机[3-5]。甜菜捡拾机械代表机型有西班牙马赛(MACE)公司生产的RT307型甜菜捡拾装车机、RT310型甜菜捡拾装车机和RT314DL型甜菜捡拾装车机(图2)。RT314DL型甜菜捡拾装车机收获作业时,甜菜通过捡拾板捡拾起来后,被送到星状轮清除杂质,再通过提升机构运送至车箱,最后被运送带卸载到运输车上,完成捡拾作业。该捡拾机可靠性高、操作方便简单、甜菜破损率低、适应能力强,可满足复杂情况下作业,有大容量的车载车箱,能够减少运输时间,提高收获效率。缺点是价格高昂,投资较高;机器体积较大,不适合在小地块进行收获作业;维修成本高,维修人员专业性高[6]。

图1 格立莫GRIMME REXOR 620型甜菜收获机Fig.1 GRIMME REXOR 620 beet harvester

图2 马赛MACERT314DL型甜菜捡拾装车机Fig.2 MACERT314DL beet picking and loading machine
1.2 国内发展现状
国内甜菜收获机械多为分段收获方式,联合收获机械较少。甜菜联合收获机价格高昂、维护不方便、维护成本较高、体积较大,不适合我国小地块生产模式。分段收获机具有价格便宜、易操作、维护简单方便等特点,更适合我国现阶段下的小地块生产模式需求[3-4]。分段收获方式按机具完成收获工序情况可分为两段收获和3段收获。其中两段式收获是一台机器完成打叶、切顶、挖掘工序,另一台机器完成捡拾、清理、集运工序。3段收获方式是将收获过程分为3步完成:第1步完成甜菜打樱、切顶工序;第2步完成挖掘、集条工序;第3步完成捡拾、输送工序,同时清除杂质[3-5]。甜菜捡拾机械在两段收获和3段收获中都有应用,是分段收获的关键机器。
刘凤勇[7]发明了一种甜菜捡拾去土升运机。此机器通过捡拾齿捡拾甜菜,再将甜菜运送到螺旋去土输送辊装置,完成输送和去土工序,最后完成甜菜升运收集工作。
刘凤勇[8]发明了一款甜菜集箱与直卸组合式捡拾收获机。此机型拥有一个甜菜箱,可实现边捡拾甜菜边卸载到集运车,集运车满车后,收获机可以继续捡拾甜菜,将甜菜收集到甜菜箱内保存,当集运车返回后再卸载到集运车,如此反复。当甜菜箱装满后,收获机停止前进,将甜菜箱内的甜菜卸载。此收获方式节省时间,提高了作业效率。
乌鲁木齐亿能达机械制造有限公司[9]研发了一款新型甜菜捡拾机。该机通过仿形集拢靴将集成一条的甜菜块茎进一步集中起来,再经过捡拾装置、输送装置及清土装置,到达升运卸料装置,完成卸料。
王辉[10]发明了一款自捡式甜菜装载机。工作时,甜菜被刮地板铲起,再经捡拾输送带送到车箱内。此机型特点是有3个车箱,能够实现不间断输送装车,中部车箱内安装有摊平搅拢,使甜菜平整分布在车箱内。此机器也能够捡拾土豆等作物。
焉耆县天成农业机械制造有限公司[11]研发了一款甜菜捡拾装车机,依靠捡拾输送链带耙将甜菜捡拾起来,再经输送带送到除草辊,除草后由装车输送带完成装车。此机型也可以捡拾土豆等作物。
常州汉森机械有限公司[12]研制了一款甜菜联合捡拾装卸一体机——汉美4TJ-140型甜菜联合捡拾装卸机(图3),该机工作原理和西班牙马赛甜菜捡拾机基本相同。此机操作简单、价格便宜、性能可靠、售后服务快、维修方便、输送平缓,能减少对甜菜的损伤[6]。

图3 汉美4TJ-140型甜菜联合捡拾装卸机Fig.3 Han Mei 4TJ-140 beet combine picking and handling machine
新疆文彦高科机电设备有限公司[13]研发了一款甜菜挖掘捡拾收获机。收获时,利用捡拾犁将甜菜挖掘出来,随后进入清料旋转盘,清土后输送到收集箱。
新疆文彦高科机电设备有限公司[14]研发了一种甜菜挖掘捡拾清杂收获机,此机型对上一代机型进行了升级。清料旋转盘由单级改为多级,提高了除土率。提升输送机改为循环式,提高了输送效率。
新疆文彦高科机电设备有限公司[15]研发了一款举升式甜菜挖掘捡拾收获机。此机型和上一代机型相比,在捡拾犁和清料旋转盘之间设置了导料杆,在收集箱上部设置了布料搅拢,收集箱底面可以在举升油缸的作用下升起,将甜菜卸出。
酒泉科德尔农业装备科技有限责任公司[16]研发了一种自走式甜菜捡拾装载机。工作时,铲料板进入土壤,甜菜通过捡拾轴上的捡拾杆翻转到传送带,输送到储料斗,储料斗下方设置有压力传感器,可以检测储料斗质量,防止甜菜溢出。
池忠福[17]发明了一款自走式多用收获捡拾机。此机器结构主要包括前割台、输送带和料仓。此机型最大特点是能够实现多种作物收获,不仅能够捡拾甜菜,也可以捡拾红薯、马铃薯、石头和残膜等,还可以收获花生、大蒜。
中机美诺科技股份有限公司[18]研发了一款自带集果箱的甜菜捡拾装载机,可以完成甜菜果实拾起、除土、集箱和卸载等功能。甜菜通过组合式拨盘在离心力作用下,能更好地清除泥土和夹杂物。
泉州耐博进出口贸易有限公司[19]研发了甜菜采收用捡拾机。收获时,捡拾机利用吸力将甜菜吸入机器内,机器内安装防尘网和滤网对尘土进行过滤,最后输送机构将甜菜运送到储料箱内。
安徽鑫洋机电有限公司[20]研制了一款甜菜捡拾装卸机。工作时,捡拾机构将甜菜捡起,经输送清理机构输送清土,由提升机构送入车箱内,装满后通过卸料机构卸载。
2 捡拾机械工作原理
目前,甜菜捡拾方式有两种:一种是分段收获下经过挖掘集条后,用甜菜捡拾机捡拾甜菜;另一种是联合收获下经过一系列工序直接完成甜菜收获。现阶段,甜菜挖掘打叶切顶机与捡拾机搭配作业方式在我国普遍生产使用,具有简单灵活的特点,相对而言更适合我国现阶段农业生产需要。而联合收获作业方式则更适合在较大农田地块中,且联合收获机的体积较大,也不适合在小地块中进行收获作业。但随着国家对农村土地政策的不断改进,甜菜的规模化经营将成为未来的发展趋势。
甜菜捡拾装卸机主要包括车架、捡拾机构、提升机构、输送机构和卸料机构。其中,车架设置有行走装置和车箱;捡拾机构安装在车箱下部,包含捡拾架、旋转指盘和栅栏;提升装置是一个环形提升链,安装在车箱后部,环形提升链带动甜菜随其旋转上升,甜菜到达顶部位置时掉落到车箱内;输送机构位于车箱内,输送机构是一个搅拢轴,搅拢轴上附带有搅拢叶片,搅拢轴纵向安装在车箱内,连接提升机构和卸料机构;卸料机构位于车箱一侧,包括卸料框架和推动装置。
捡拾机构将集条后的甜菜捡拾后,送到旋转指盘清理杂物,除土后的甜菜由提升装置带动旋转运送到车箱顶部,由于重力作用落入车箱中,车箱中的输送机构搅拢轴转动,甜菜通过搅拢叶片的转动运送到车箱前端,到达卸料装置,甜菜再通过卸料机构卸载。甜菜捡拾装卸机通过采用捡拾架装置、旋转指盘装置、环型提升链装置和搅拢轴式输送机构,可以完成甜菜从捡拾到收集一系列工序。其中,捡拾架和旋转指盘的组合作业方式捡拾效果好、除土效果好、携带杂质少和杂草缠挂少。
3 关键技术
3.1 捡拾技术
甜菜捡拾机在田地中捡拾的是挖掘后集成条的甜菜,捡拾架(图4)将集成一条的甜菜捡拾起来并输送到旋转指盘和栅栏之间[20]。经挖掘后地表土壤比较疏松,捡拾机构能够根据田地土壤状况、甜菜分布情况等因素进行调整,确保甜菜全部捡拾,还要尽量减少甜菜携带的土壤及杂质,同时减少甜菜捡拾过程中的损伤率,并尽可能地降低捡拾阻力,减少牵引拖拉机的燃油消耗[21-23]。
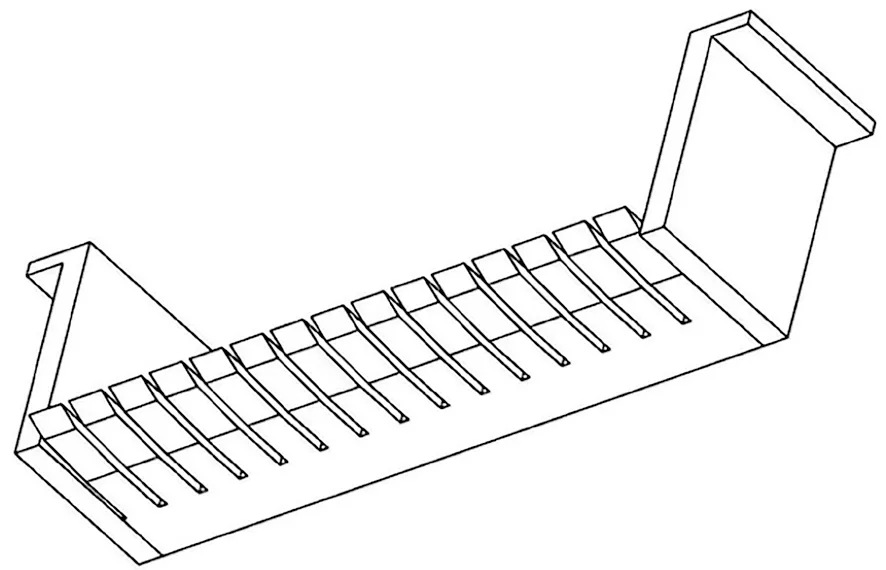
图4 捡拾架Fig.4 Pickup rack
收获作业时,甜菜捡拾机捡拾板进入土壤中,带动甜菜沿板面斜向上移动,甜菜间杂质通过板面缝隙下漏。液压杆能够改变捡拾架的入土角度和旋转指盘的接地面积,以实现大幅度提高甜菜捡拾机的分离效率和损伤率,同时降低对捡拾机的阻力[20-21]。
3.2 土块分离技术
甜菜通过捡拾架上升进入两个前后排列的旋转指盘(图5)。旋转指盘由多个金属杆构成,各金属杆之间有间隙,可以去除大量泥土杂质,旋转指盘周围有环型栅栏,防止甜菜甩出[20]。收获时,旋转指盘带动甜菜转动,产生离心力和摩擦力,实现清理泥土和杂质,并在栅条空隙处将泥土和杂质甩出,以达到甜菜和土壤分离的目的[24]。

图5 旋转指盘Fig.5 Rotating finger disk
3.3 提升技术
甜菜通过旋转指盘除土后进入提升机构(图6)[20]。提升机构安装在车箱后部,提升机构包括处于捡拾机车箱尾部的环型提升链,以及驱动组合轮组,用于驱动提升链转动。在提升链装置的内壁每隔一定距离安装有对甜菜进行提运的粑齿装置,粑齿结构一端固定在提升链上,另一端呈弯曲状,可以防止甜菜掉落。甜菜进入提升机构后,在提升链内壁的粑齿结构带动下上升,到达顶部后,甜菜由于重力作用掉落在车箱内。

图6 提升机构Fig.6 Lifting mechanism
3.4 输送技术
输送机构是用于输送的搅拢轴(图7),搅拢轴表面焊接着搅拢叶片,轴在液压马达的带动下转动,可以带动甜菜向车箱前端运动[20]。搅拢轴在甜菜输送过程中有合适的转速,保证甜菜向前运输的同时,也不会被离心力甩出和损伤。甜菜的大小不一,因此需要一个合适的叶片间距,搅拢叶片间距在保证甜菜有效输送的基础上,也要减少甜菜损伤率。

图7 搅拢轴Fig.7 Stirring shaft
3.5 卸载技术
卸料机构(图8)是在车箱内甜菜装满后,将甜菜卸载的装置[12]。卸料链上安装有和卸料链一起运转的卸料爪,卸料爪通过焊合板焊接在回转卸料链一周,能有效抓附甜菜;卸料框架上端安装有驱动轴,能够带动回转卸料链运转,可以根据甜菜情况改变输送速度;卸料框架下方设置有张紧装置,张紧装置能够张紧回转卸料链,使卸料链更好地运转。甜菜卸载时,甜菜被卸料爪带动运输,实现卸载。
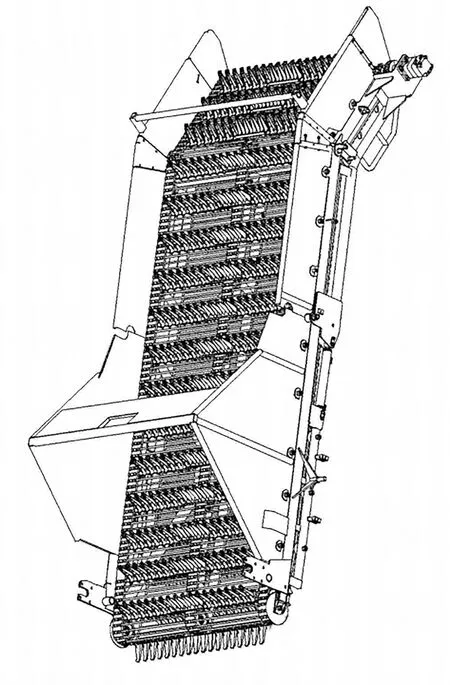
图8 卸料机构Fig.8 Shedding mechanism
4 存在的问题及发展趋势
4.1 存在的问题
目前国内甜菜捡拾机仍以小型化为主,去土除杂效果与作业速度负相关,行走速度较低时才能获得较好的去土效果,收获效率不高,仅仅实现了替代人工作业,自动化、智能化程度、技术含量仍较低,还有较大的发展空间。甜菜捡拾属于甜菜分段收获的重要环节,分段收获只是实现甜菜收获机械化的过渡手段,环节过多使得目前我国甜菜生产成本较高,经济效益差,严重影响农民的生产积极性,联合收获是必然趋势[25-26]。
4.2 发展趋势
(1)提高甜菜捡拾机械的自动化程度。由于甜菜种植各地区土壤性质不相同,甜菜的大小有差异,仅仅依靠机械结构很难完全满足机械在各种复杂情况的作业要求。通过现代化的自动控制技术、传感器技术、液压技术的应用,可以实现捡拾机在不同作业环境情况调整捡拾板入土深度、角度和旋转指盘速度,实现捡拾机对不同情况下甜菜收获的适应,进而减少甜菜损伤率,提高生产率,增加效益。
(2)提高甜菜捡拾机械的智能化程度。甜菜捡拾机械可以增加智能识别测控功能,在甜菜捡拾过程中能够实现捡拾板自动对行,并实时检测甜菜大小和产量等信息,实现精准农业技术;在捡拾时能够使用传感器监测甜菜和土壤情况,进而提升捡拾板精确入土深度;运用声波探测技术、视觉识别技术,能够准确识别甜菜中的土石块等杂物,进而帮助分离装置有效去除杂物[22]。
(3)应用无人驾驶技术。甜菜捡拾机搭载GPS导航系统及巡航系统,可以实现捡拾机的自动驾驶、转向和对行等操作,自主完成甜菜捡拾、运输和卸载等工序。无人操作技术可以解放劳动力,减少劳动成本,提高效益,收获甜菜不受白天和黑夜的影响,有利于抢占农时,提高捡拾收获效率。
5 结束语
近年来,我国甜菜收获仍以分段收获方式为主,甜菜捡拾机应具备捡拾、去土、提升、输送和卸载功能。在研究和学习国外先进甜菜收获技术和装备的基础上,国内甜菜捡拾机生产企业研发了多种多样的、适应我国甜菜收获国情的甜菜捡拾机。国产甜菜捡拾机的普及提高了我国甜菜收获的效率,减轻了劳动强度,大大提高了我国甜菜收获机械化水平,促进了甜菜种植业的发展。今后,加速甜菜捡拾机的自动化、智能化发展有望进一步提高甜菜收获效率,降低糖料生产成本,促进制糖产业健康发展。
